Download to read offline


![28 Nov. IVCNZ 2013 –J. Pritts, O. Chum, J. Matas: Approximate Models for Fast and Accurate Epipolar Geometry Estimation
How bad is it?
Reduce sample size for fundamental matrix estimation by hypothesizing
approximate models
I / N [%]
Sizeofthesamplem
Difficult wide baseline stereo matching problems at 95% confidence](https://image.slidesharecdn.com/ivcvnz13-160906113017/85/Ivcvnz13-12-320.jpg)
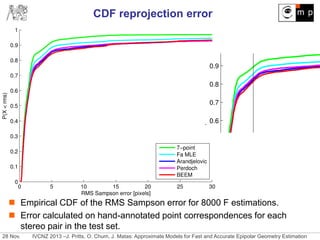
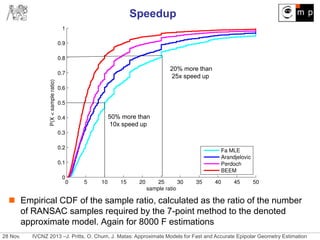

The document discusses new approximate models for estimating epipolar geometry that require smaller sample sizes, potentially increasing efficiency in RANSAC methods. It introduces two innovative methods for region-to-region correspondences and emphasizes their effectiveness through experimental comparisons. The study concludes that these methods improve speed and accuracy of fundamental matrix estimation in stereo matching tasks.













































