
Download as PDF, PPTX
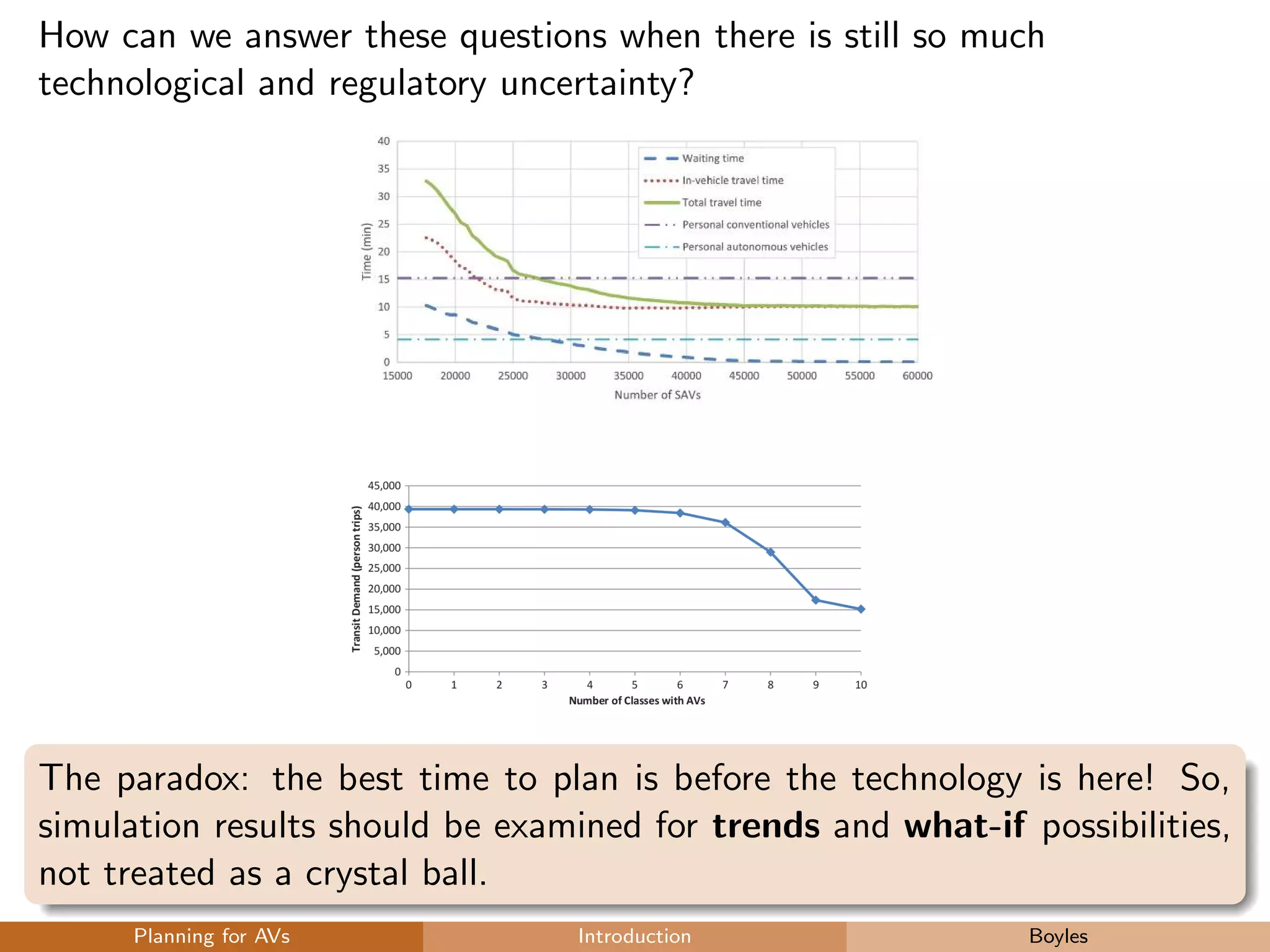
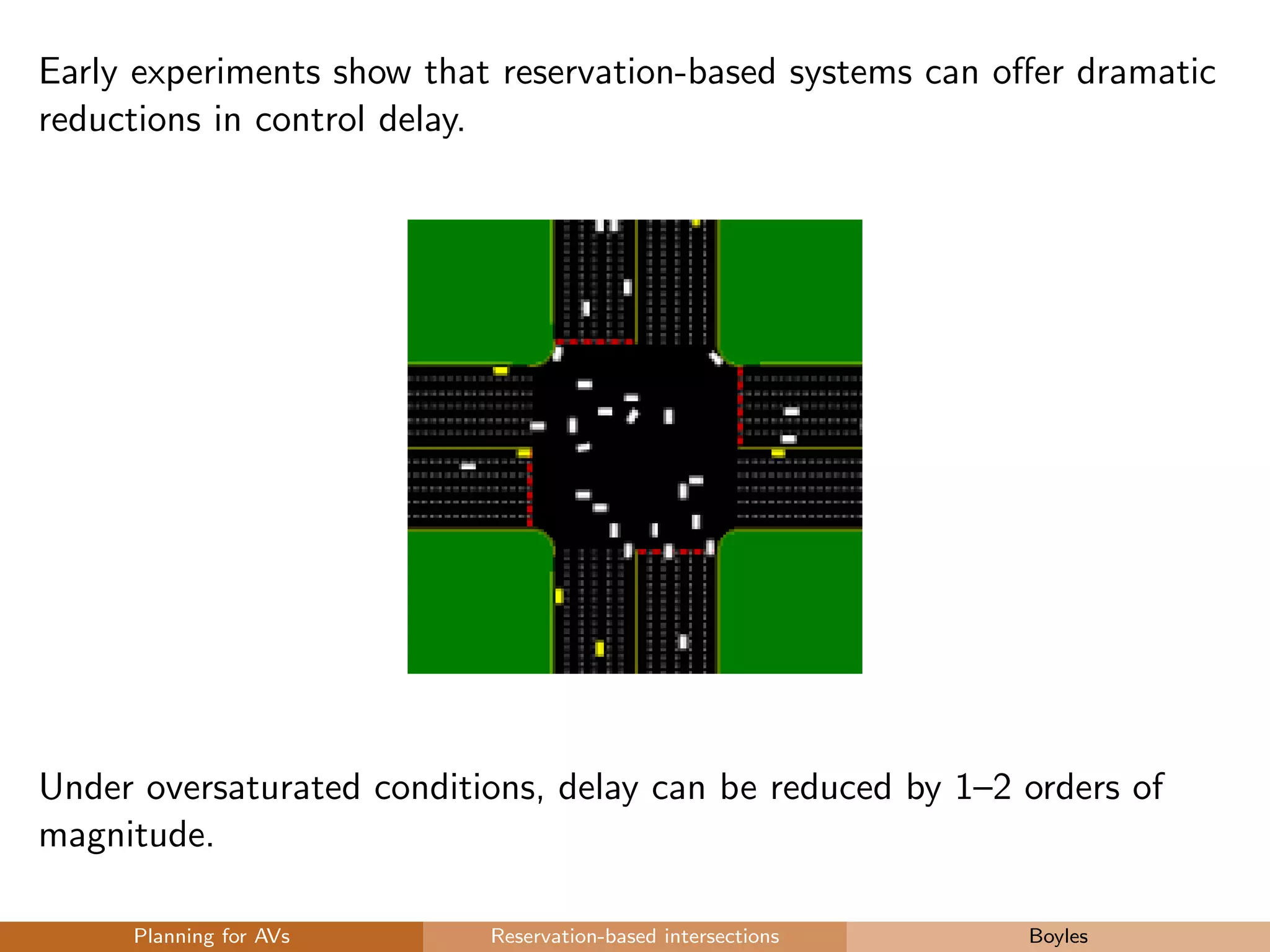
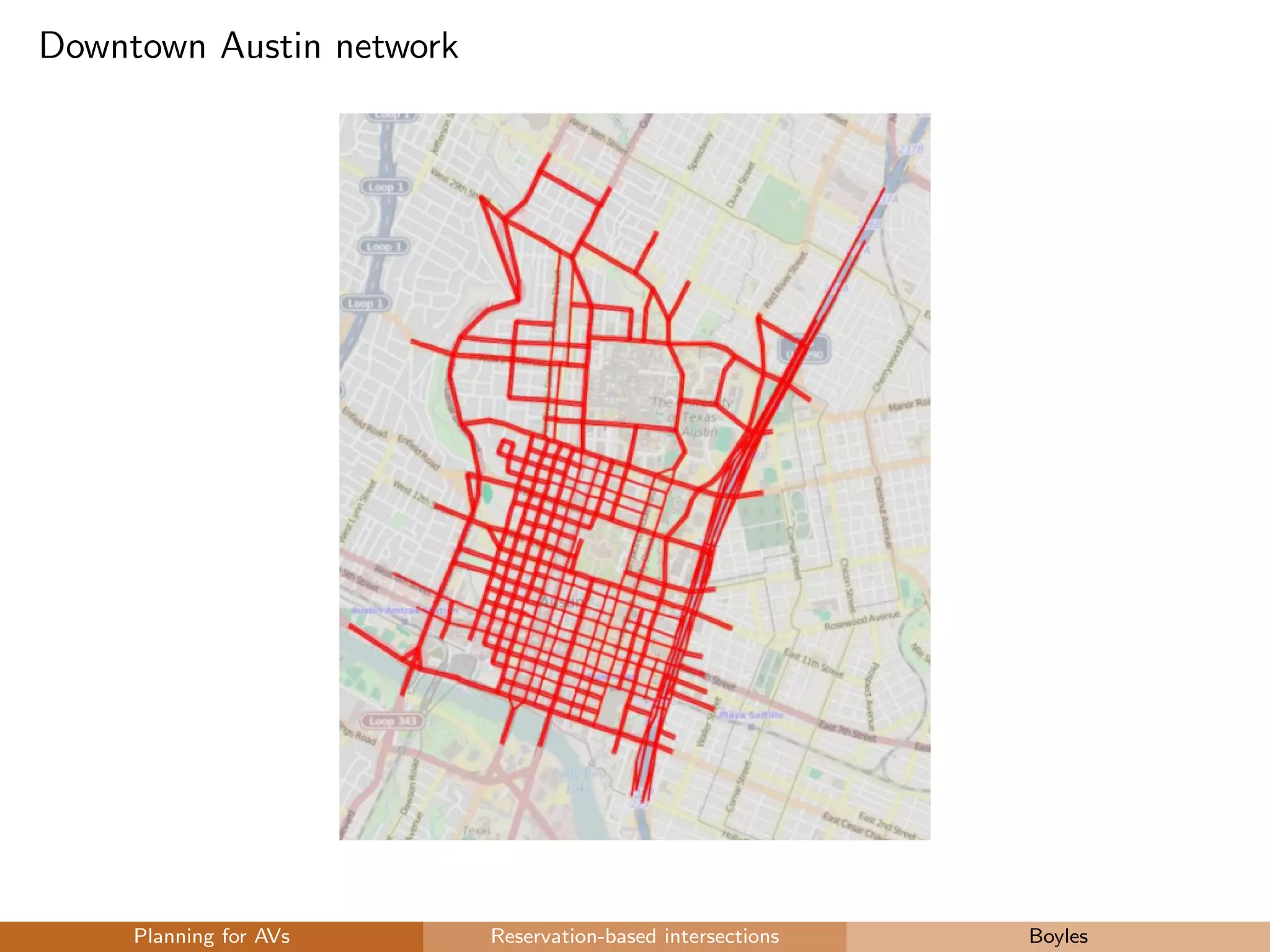
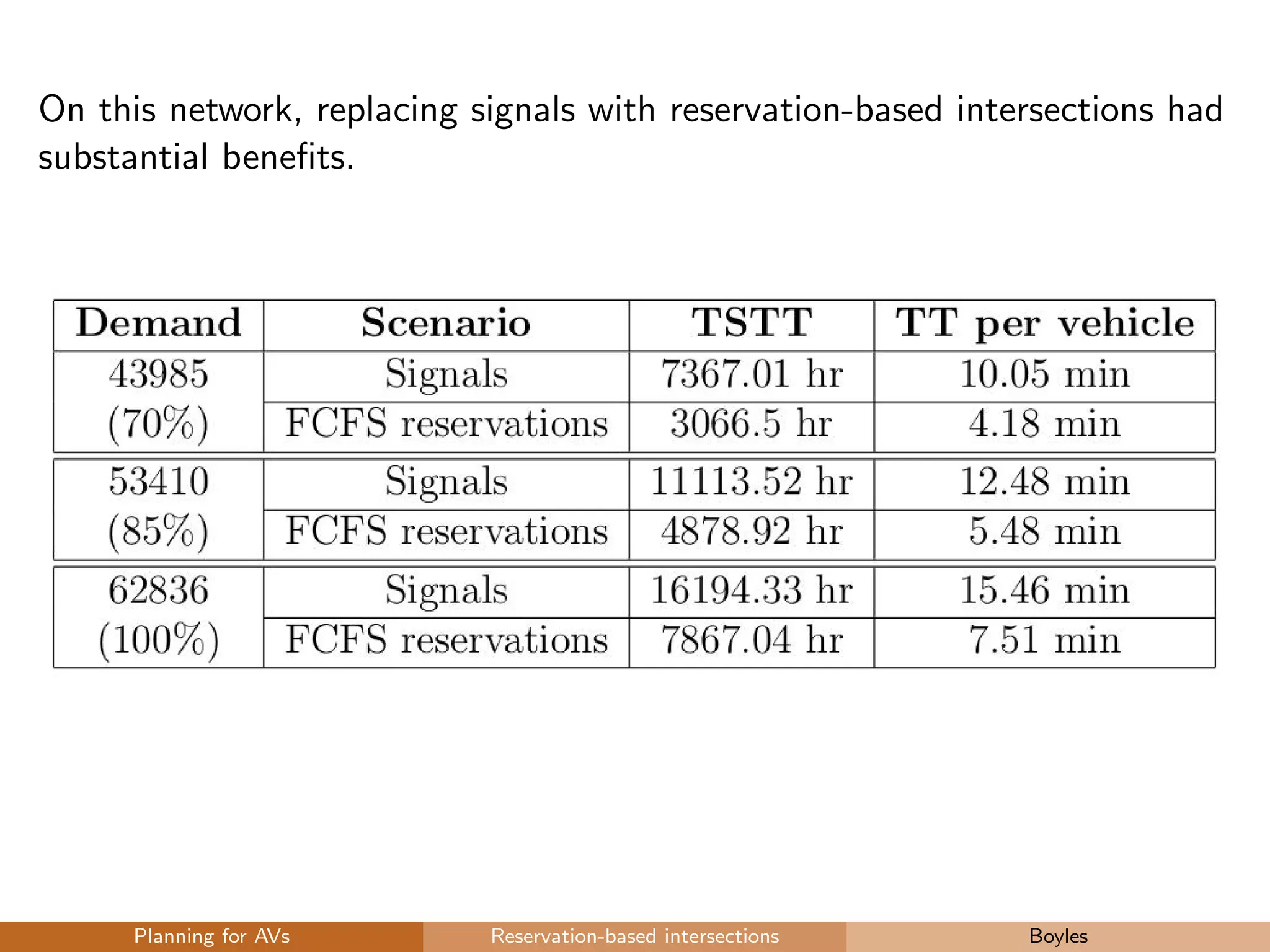
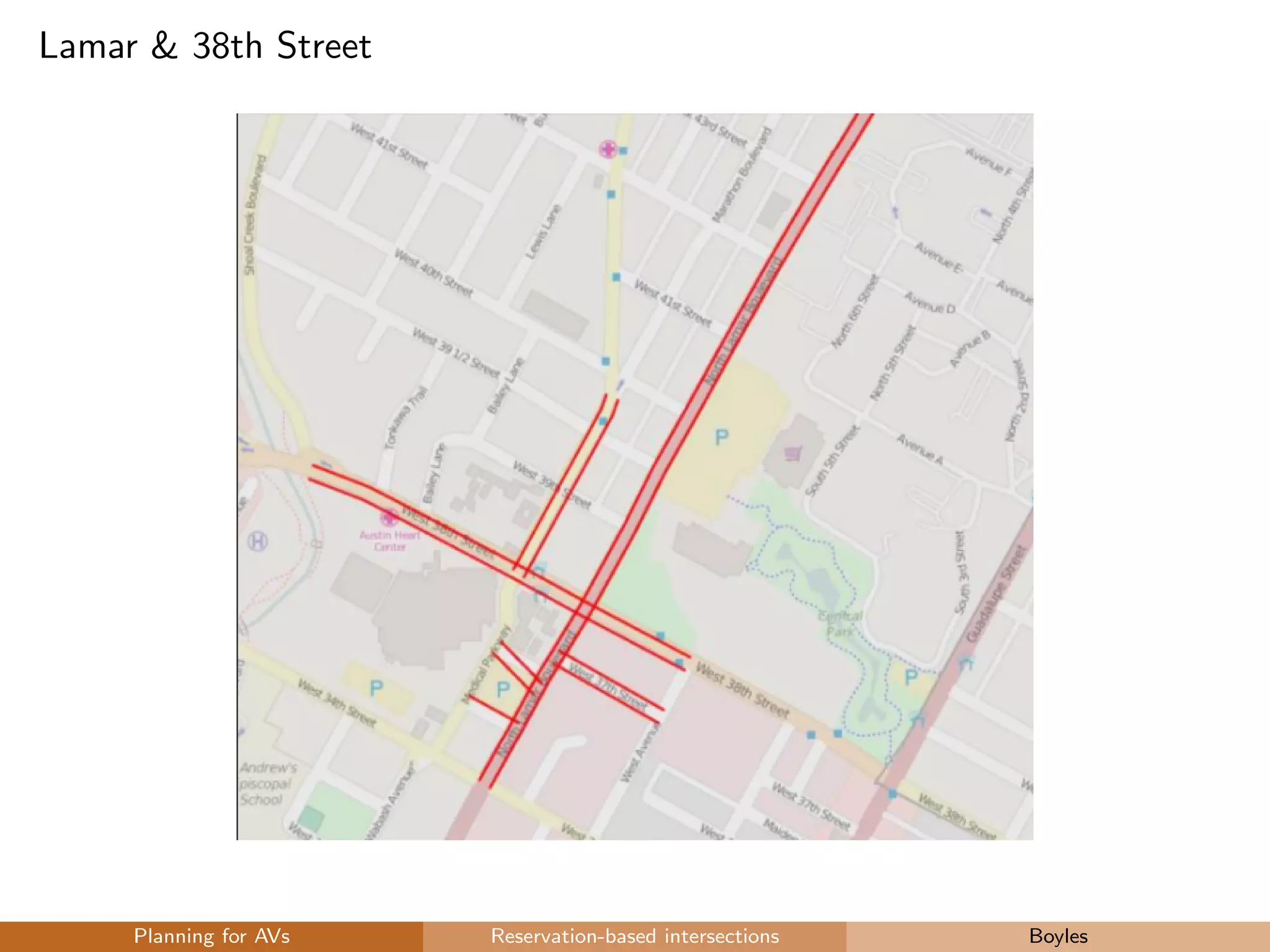
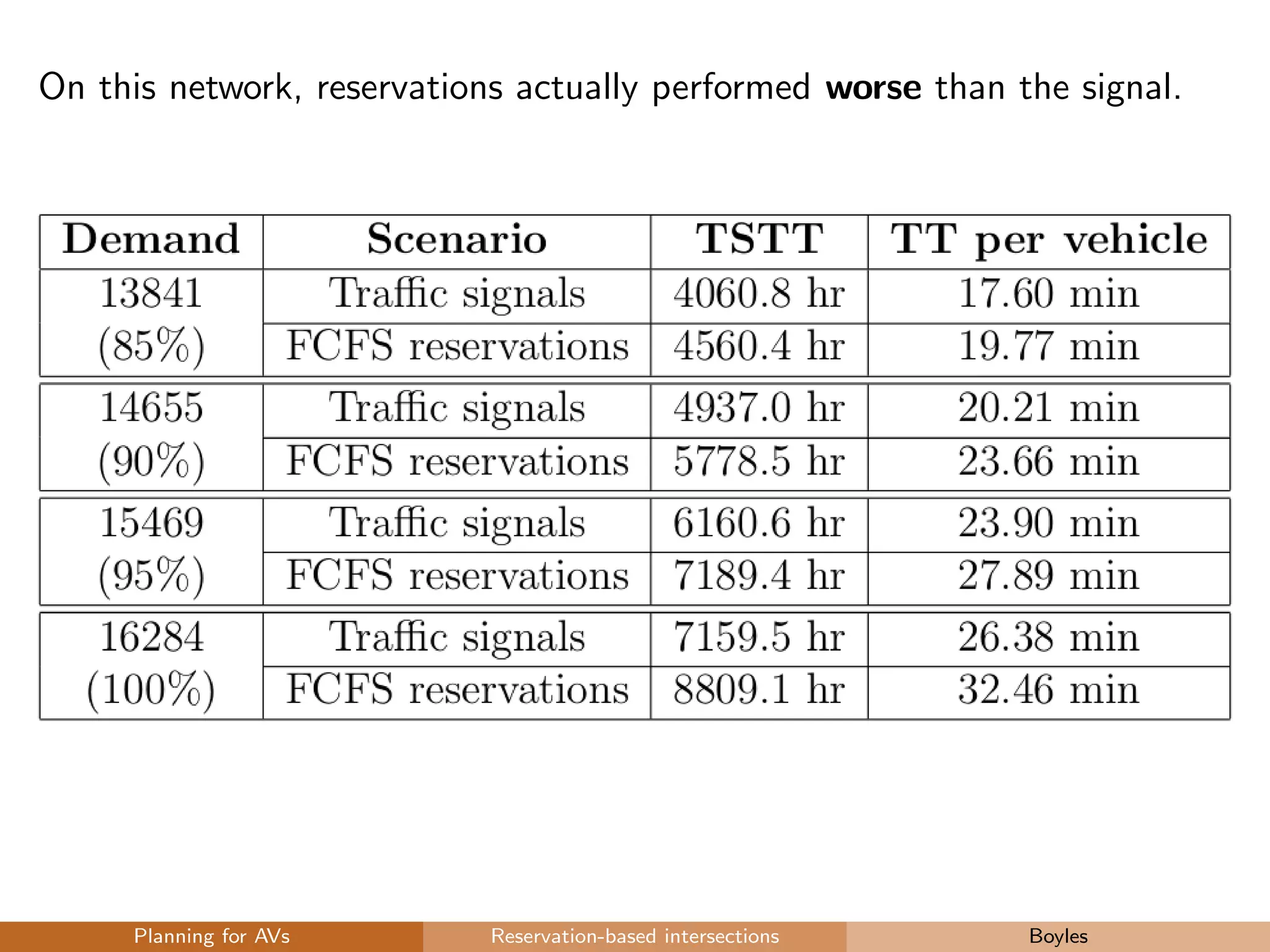
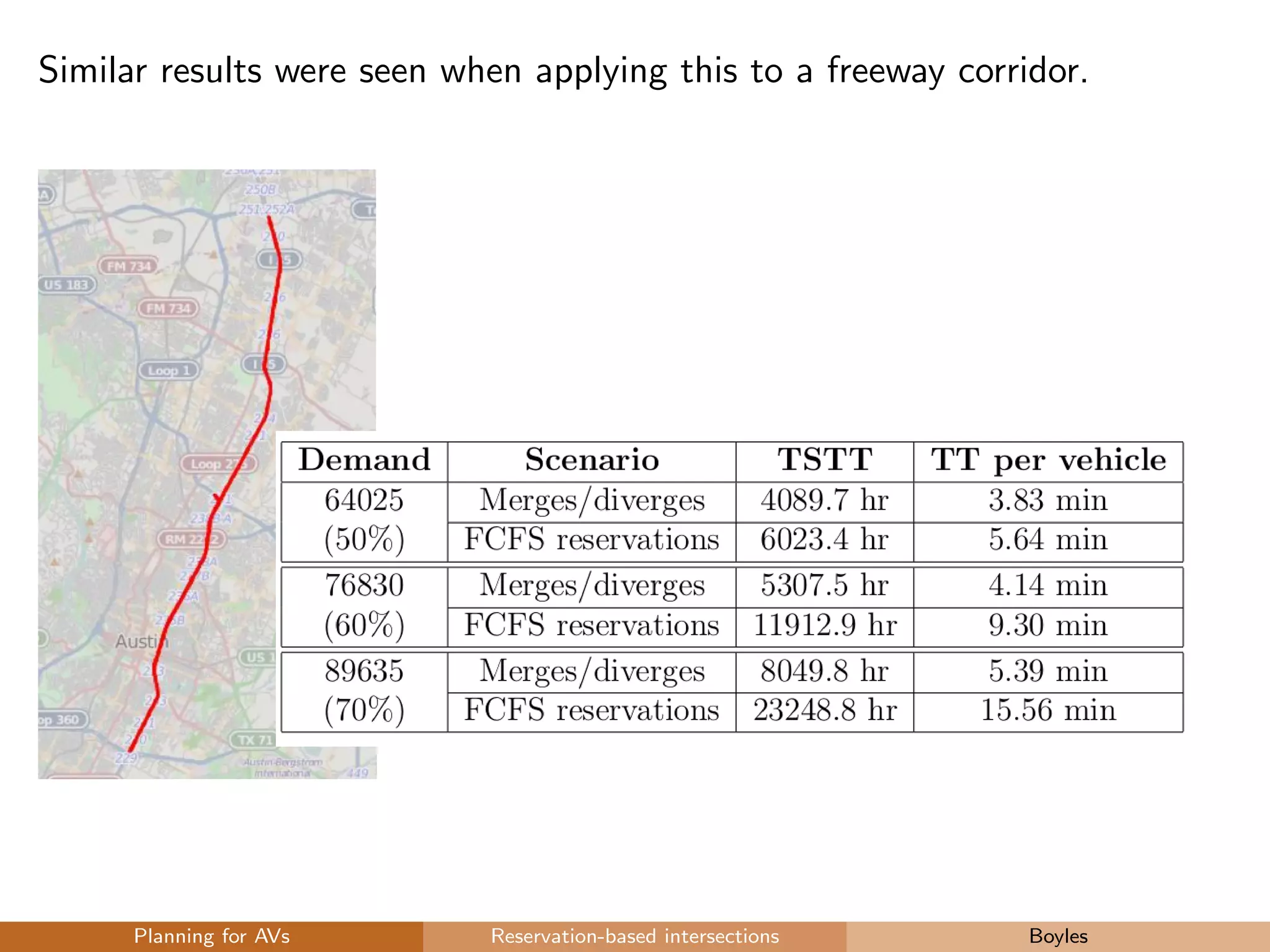
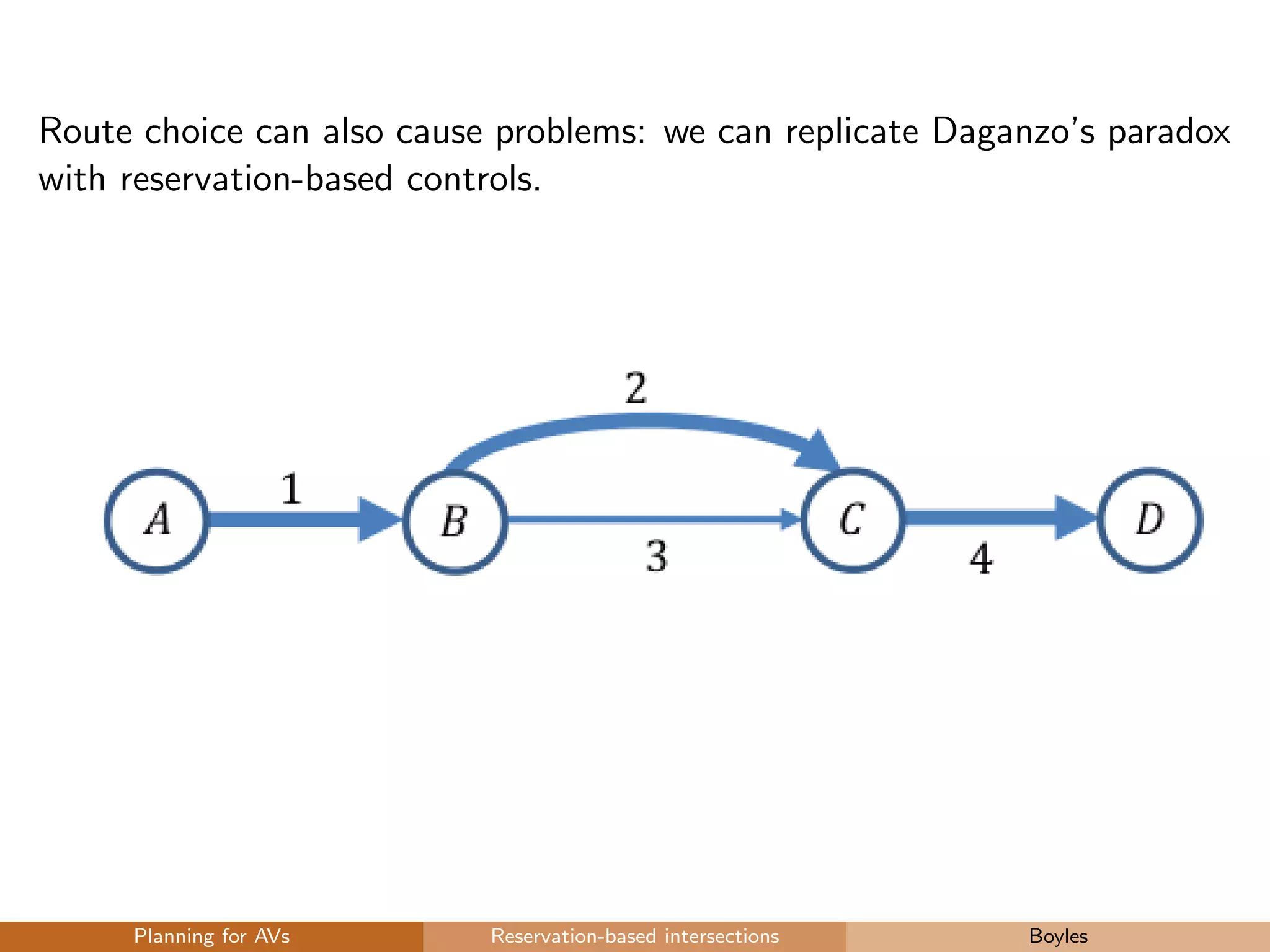
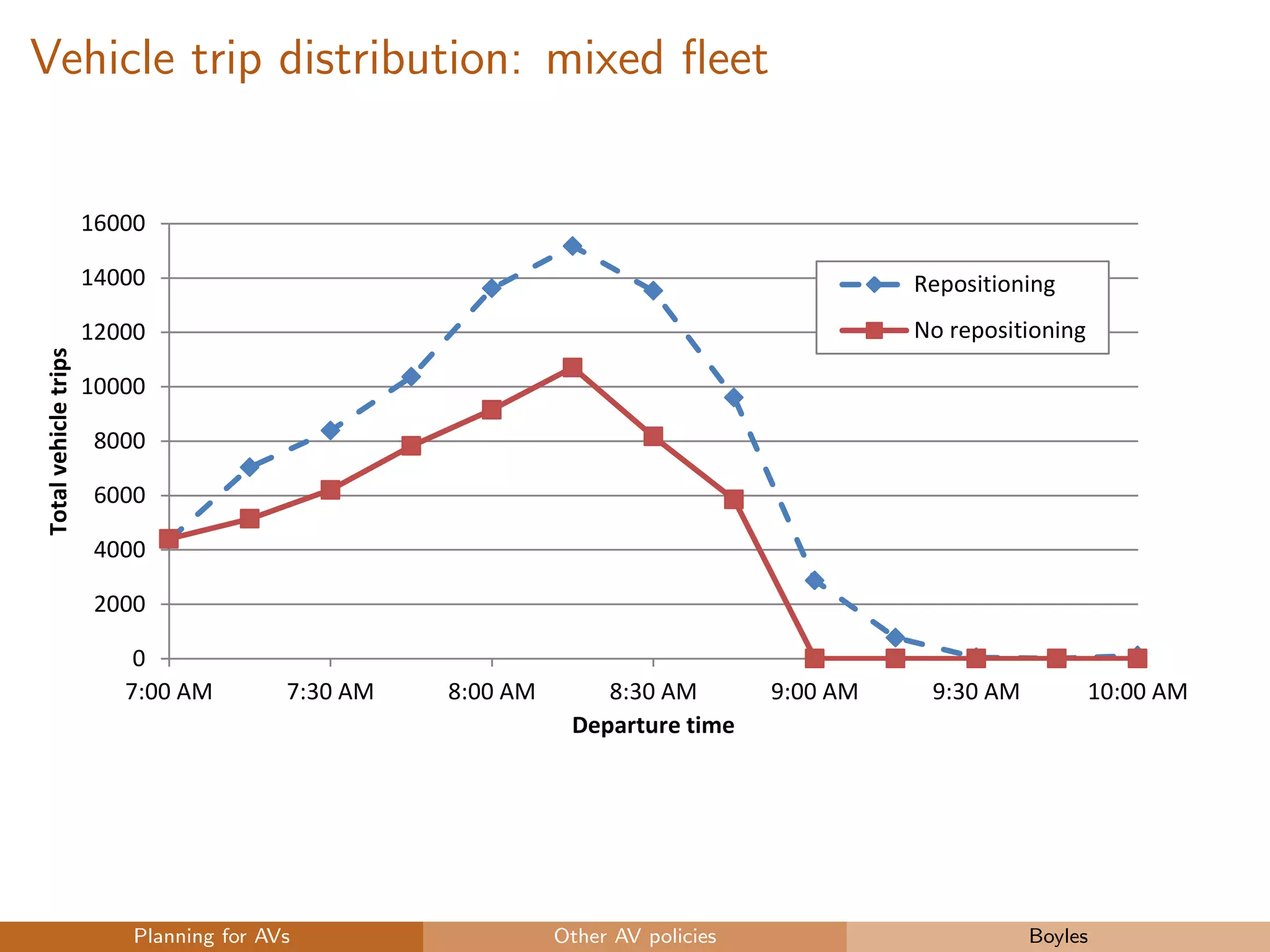
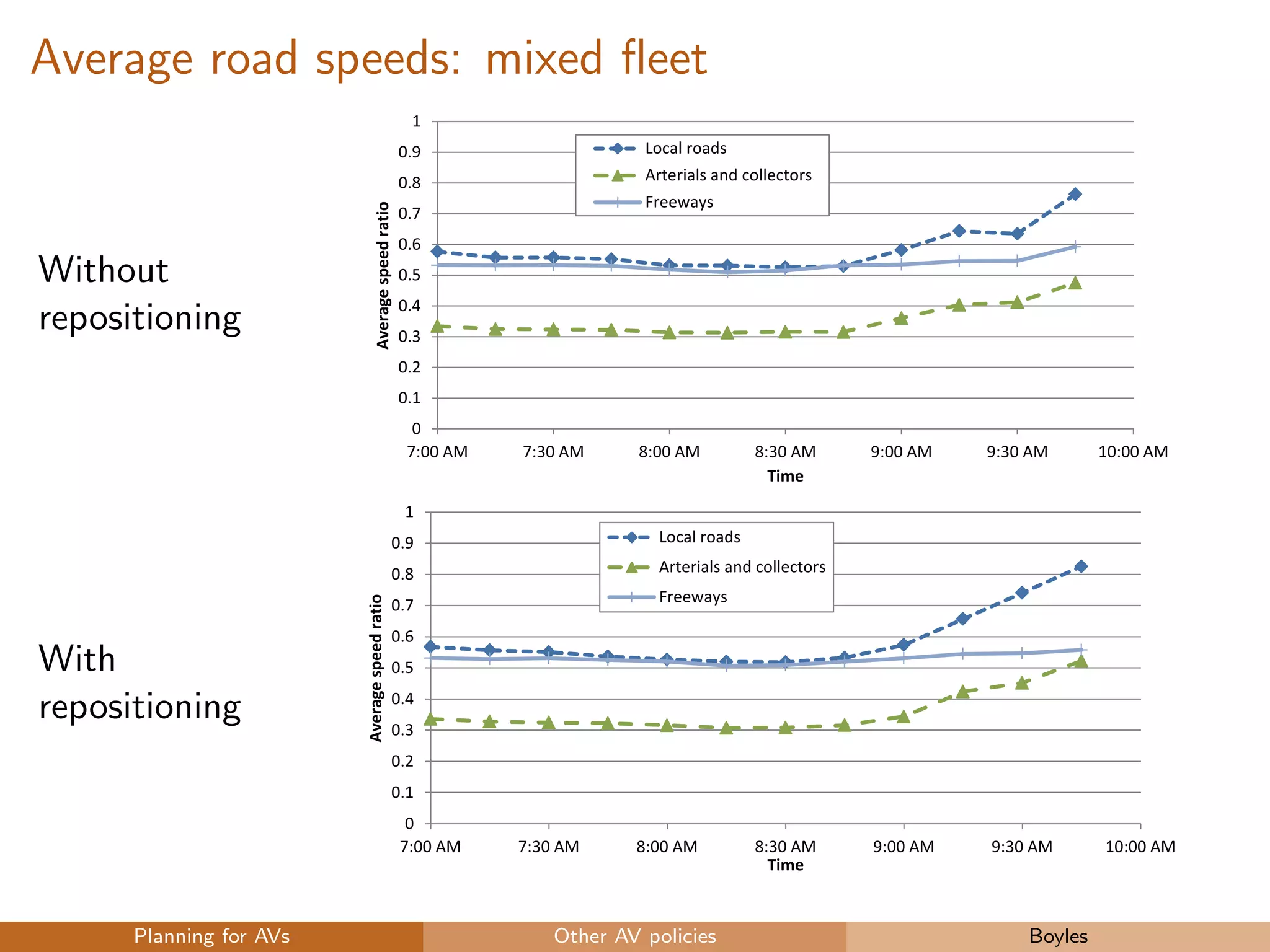
This document summarizes a presentation about planning for a world with connected and automated vehicles. Some key points include: - Automated vehicles will have major impacts on traffic such as increased road capacity through platooning and new traffic control strategies. - Models are needed to simulate these impacts at large regional scales given technological and regulatory uncertainties. - Reservation-based intersections show potential to dramatically reduce delays, but their impacts depend on factors like route choice and asymmetric demand. - Allowing empty automated vehicles to reposition could smooth traffic flows compared to not repositioning empty vehicles.



































































