Velocities1
- 1. • Time derivatives of the loop-closure
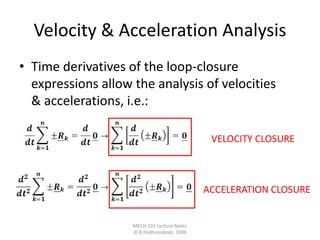
expressions allow the analysis of velocities
& accelerations, i.e.:
Velocity & Acceleration Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
VELOCITY CLOSURE
ACCELERATION CLOSURE
- 2. • Review of time derivatives of displacement
Velocity & Acceleration Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
- 3. • Example: Velocity analysis of the offset
slider-crank
Velocity & Acceleration Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
2
3
1
0
Displacement closure:
- 4. • Taking the time derivative:
• Rearranging and substituting:
Velocity & Acceleration Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
- 5. • Taking the time derivative:
• Rearranging and substituting:
Velocity & Acceleration Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
- 6. • Taking the time derivative:
• Rearranging and substituting:
Velocity & Acceleration Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
- 7. • Taking the time derivative:
• Rearranging and substituting:
Velocity & Acceleration Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
- 8. • Splitting into real and imaginary eqns
• The solution for is obtained by solving
the imaginary equation as:
Velocity & Acceleration Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
REAL
IMAGINARY
- 9. • Substituting this solution back into the real
equation gives the other unknown:
Velocity & Acceleration Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
REAL EQUATION
- 10. • The velocity of one point can be expressed
as the velocity of another point, plus the
relative velocity of the two points
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
- 12. • Example
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
RA
RB/A
RB
A
B
O4O2
θ2
θ3
θ4
ω2
VB
Absolute velocity of point B
- 13. • Example
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
RA
RB/A
RB
A
B
O4O2
θ2
θ3
θ4
ω2
VA
Absolute velocity of point A
- 14. • Example
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
RA
RB/A
RB
A
B
O4O2
θ2
θ3
θ4
ω2
VB/A
Relative velocity of point B w.r.t. point A
- 16. • Note that:
– The direction and magnitude of VA is a known
function of the input angular velocity, ω2
– The mechanism’s joints define the direction of
many of the remaining relative and absolute
velocities
– This information can be manipulated to find the
velocity (direction and magnitude) of points not
on the input link
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
- 17. • There are 4 distinct cases where relative
velocity analysis is applied (though only 3
are non-trivial)
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
Same Point Different Points
Same
Link
Different
Links
Case 1
TRIVIAL CASE
Case 2
DIFFERENCE
MOTION
Case 3
RELATIVE MOTION
Case 4
DIFFERENCE & RELATIVE
MOTION
- 18. • Case 2: Different points on the same link
– Want to find velocity of point B w.r.t. point A (VB|A)
– Take the derivative of the rel. position vector (RB|A)
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
RA
RB/A
RB
A
B
O4O2
θ2
θ3
θ4
ω2
VA
VB/A
VB
- 19. • Case 2: Different points on the same link
– Examining this result gives simple method for
calculation:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
RA
RB/A
RB
A
B
O4O2
θ2
θ3
θ4
ω2
VA
VB/A
VB
Always = 0 for a rigid link
(no length change)
Equivalent to rotation through 90° in the sense
(CW or CCW) of ωB|A (i.e. ω3)
So, for a rigid link :
VB|A = (rB|A)(ω3), ┴ RB|A
- 20. • Case 2: Different points on the same link
– Recalling that VB = VA + VB|A we can set up a system
of equations to solve for VB:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
RA
RB/A
RB
A
B
O4O2
θ2
θ3
θ4
ω2
VA
VB/A
VB
Tricky to approach analytically, but graphical
methods can be used, and can be much more
intuitive
- 21. • Case 2 Example (Supp Ex V1)
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
- 22. • Solve using a graphical method
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
- 23. • Find VB by relative velocity analysis:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
0V
1 mm = 5 mm/s
- 24. • VA: direction, magnitude both known
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
0V
1 mm = 5 mm/s
- 25. • VA: direction, magnitude both known
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
0V
1 mm = 5 mm/s
C
B
A
O2 O4
3 4
2
ω2
- 26. 0V
VA
1 mm = 5 mm/s
A
• VA: direction, magnitude both known
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
- 27. 0V
VA
1 mm = 5 mm/s
A
• VB|A: direction known, magnitude unknown
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
- 28. • VB|A: direction known, magnitude unknown
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
0V
VA
1 mm = 5 mm/s
A
- 29. • VB|A: direction known, magnitude unknown
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
0V
VA
dir(V
B|A)
1 mm = 5 mm/s
A
- 30. • VB: direction known, magnitude unknown
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
0V
VA
dir(V
B|A)
1 mm = 5 mm/s
A
C
B
A
O2 O4
3 4
2
ω2
- 31. • VB: direction known, magnitude unknown
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
0V
VA
dir(V
B|A)
1 mm = 5 mm/s
A
- 32. • VB: direction known, magnitude unknown
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
A
- 33. • Solution is obtained by intersection &
measurement
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
A
C
B
A
O2 O4
3 4
2
ω2
- 34. • Solution is obtained by intersection &
measurement
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
A
B
VB
C
B
A
O2 O4
3 4
2
ω2
- 35. • Solution is obtained by intersection &
measurement
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
A
B
VB
X
C
B
A
O2 O4
3 4
2
ω2
- 36. • Noticing that , we measure:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
X
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
A
B
VB
- 37. • Noticing that , we measure:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
V
B|A
A
B
VB
X
- 38. • Noticing that , we measure:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
V
B|A
A
B
VB
X
- 39. • And compute:
• Where the direction of rotation is inferred
from the direction of
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
V
B|A
A
B
VB
X X
- 40. • Similarly:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
V
B|A
A
B
VB
X X X
- 41. 0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
V
B|A
A
B
VB
• Now, VC can be found in a variety of ways:
– Intersect relative velocity directions w.r.t. A & B
– Compute directly, e.g. VC = VA+(ω3 X AC)
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
X X X
- 42. • Using the first method, note that:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
X X X
C
B
A
O2 O4
3 4
2
ω2
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
V
B|A
A
B
VB
- 43. • Using the first method, note that:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
X X
and ,
X
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
V
B|A
A
B
VB
- 44. • Using the first method, note that:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
X X
and ,
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
dir(VC|A)
V
B|A
A
B
VB
X
- 45. • Using the first method, note that:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
X X
and ,
X
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
dir(VC|A)
V
B|A
A
B
VB
- 46. • Using the first method, note that:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
X X
and ,
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
dir(VC|A)
V
B|A
dir(VC|B
)
A
B
VB
X
- 47. • Intersection gives the solution for VC
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
X X X
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
dir(VC|A)
V
B|A
dir(VC|B
)
A
B
VB
- 48. • Intersection gives the solution for VC
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
X X
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
dir(VC|A)
V
B|A
VC
dir(VC|B
)
A C
B
VB
X
- 49. • Intersection gives the solution for VC
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
X X
0V
VA
dir(VB)
dir(V
B|A)
1 mm = 5 mm/s
dir(VC|A)
V
B|A
VC
dir(VC|B
)
A C
B
VB
X X
- 50. • Another Case 2 Example (Supp Ex V2)
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
- 51. • Solve using the same graphical method:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
1 mm = 10 mm/s
- 52. • Find VB by case 2 analysis:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
1 mm = 10 mm/s
- 53. • VA : magnitude, direction both known
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
1 mm = 10 mm/s
- 54. • VA : magnitude, direction both known
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
1 mm = 10 mm/s
- 55. • VA : magnitude, direction both known
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
A
V
A
1 mm = 10 mm/s
- 56. • VB|A : direction known, magnitude unknown
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
A
V
A
1 mm = 10 mm/s
- 57. • VB|A : direction known, magnitude unknown
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
A
V
A
1 mm = 10 mm/s
- 58. • VB|A : direction known, magnitude unknown
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
dir(VB|A)
A
V
A
1 mm = 10 mm/s
- 59. • VB : direction known, magnitude unknown
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
0V
dir(VB|A)
A
V
A
1 mm = 10 mm/s
C
B
A
O2
3
2
ω2
4
- 60. • VB : direction known, magnitude unknown
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
0V
dir(VB|A)
A
V
A
dir(VB)
1 mm = 10 mm/s
C
B
A
O2
3
2
ω2
4
- 61. • Intersection & measurement give:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
dir(VB|A)
A
V
A
dir(VB) VBVB|A
B
1 mm = 10 mm/s
- 62. • Intersection & measurement give:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
dir(VB|A)
A
V
A
dir(VB) VBVB|A
B
1 mm = 10 mm/s
X
- 63. • And ω3 is found from:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
X
0V
dir(VB|A)
A
V
A
dir(VB) VBVB|A
B
1 mm = 10 mm/s
X
- 64. • Solve for VC by intersection:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
dir(VB|A)
A
V
A
dir(VB) VBVB|A
B
1 mm = 10 mm/s
X X
- 65. • Solve for VC by intersection:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
dir(VB|A)
A
V
A
dir(VB) VBVB|A
B
dir(VC|A)
1 mm = 10 mm/s
X X
- 66. • Solve for VC by intersection:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
dir(VB|A)
A
V
A
dir(VB) VBVB|A
dir(VC|B
)
B
dir(VC|A)
1 mm = 10 mm/s
X X
- 67. • Measuring then gives:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2
3
2
ω2
4
0V
dir(VB|A)
A
V
A
dir(VB) VBVB|A
dir(VC|B
)
B
C VC
dir(VC|A)
1 mm = 10 mm/s
X XX
- 68. • Case 3: Coincident points on different links
– Occurs for slides & pistons, cams & followers:
• Two points on different links momentarily occupy
the same point in the plane
• Each has a different absolute velocity, therefore a
relative velocity exists
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
- 69. • Case 3: Coincident points on different links
– Calculate the slide (relative) velocity, VB3|B4
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
B2, B3, B4
4
2
3
• So far, we have taken the derivative of
the relative position vector, RB3|B4
• But how can we express this vector for
two coincident points?
• Intuitively, we can imagine displacing the
slide by some small distance along the
slide, then drawing RB3|B4
• Taking the limit as the displacement
approaches zero, we can see that RB3|B4
has zero length, and is directed along the
tangent to the slide (link 4) at point B
- 70. • Case 3: Coincident points on different links
– Calculate the slide (relative) velocity, VB3|B4
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
θslide
B2, B3, B4
4
2
3
• So:
• Taking the derivative:
- 71. • Case 3: Coincident points on different links
– Calculate the slide (relative) velocity, VB3|B4
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
θslide
B2, B3, B4
4
2
3
• Simplifying gives the final expression:
• Note that this deceptively simple
expression hides the potentially difficult
task of finding the slide tangent angle
• In the following examples, straight slides
are used to avoid this hassle (tangent
angle = link angle for a straight slide)
- 72. • Case 3 Example (Supp Ex V3)
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
O2
2
ω2
4
O4
3
- 74. C
B
O2
2
ω2
4
O4
3
• Use case 3 analysis to find VB4:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
0V
1 mm = 10 mm/s
- 75. C
B
O2
2
ω2
4
O4
3
0V
1 mm = 10 mm/sC
B
O2
2
ω2
4
O4
3
• VB2: direction, magnitude both known:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
0V
B2
VB2
1 mm = 10 mm/s
- 76. 0V
B2
VB2
1 mm = 10 mm/s
0V
B2
VB2
dir(VB2|B4)
1 mm = 10 mm/sC
B
O2
2
ω2
4
O4
3
• VB2|B4: only direction is known
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
O2
2
ω2
4
O4
3
- 78. • Obtain VB4 by intersection
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
O2
2
ω2
4
O4
3
0V
dir(VB4)
B2
VB2
dir(VB2|B4)
VB4
B4
VB2|B4
1 mm = 10 mm/s
X
- 79. • ω4 follows immediately from VB4:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
O2
2
ω2
4
O4
3
0V
dir(VB4)
B2
VB2
dir(VB2|B4)
VB4
B4
VB2|B4
1 mm = 10 mm/s
X X
- 80. • VC follows immediately from ω4, or by:
•
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
O2
2
ω2
4
O4
3
0V
dir(VB4)
B2
VB2
dir(VB2|B4)
VB4
B4
VB2|B4
1 mm = 10 mm/s
X X
- 81. • VC follows immediately from ω4, or by:
• ,
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
O2
2
ω2
4
O4
3
X X
0V
dir(VB4)
B2
VB2
dir(VB2|B4)
VB4
B4
VB2|B4
dir(VC|B4)
1 mm = 10 mm/s
- 82. • VC follows immediately from ω4, or by:
• , ,
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
O2
2
ω2
4
O4
3
X X
0V
dir(VB4)
B2
VB2
dir(VB2|B4)
VB4
B4
VB2|B4
dir(VC)
dir(VC|B4)
1 mm = 10 mm/s
- 84. • Another Case 3 Example (Supp Ex V4)
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
D5, D6
5
6
- 85. • Note: The 4-Bar was solved in Ex V1
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
C
B
A
O2 O4
3 4
2
ω2
D5, D6
5
6
- 86. C
B
A
O2 O4
3 4
2
ω2
D5, D6
5
6
• VC is found by scaling arguments:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
VA
VB
V
B|A
A
B
0V
1 mm = 5 mm/s
- 87. C
B
A
O2 O4
3 4
2
ω2
D5, D6
5
6
• VC is found by scaling arguments:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
VA
VB
V
B|A
A
B
V
C|A
0V
1 mm = 5 mm/s
- 88. C
B
A
O2 O4
3 4
2
ω2
D5, D6
5
6
• Measuring:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
VA
VB
V
B|A
A
B
V
C|A
0V
C
VC
1 mm = 5 mm/s
X
- 89. C
B
A
O2 O4
3 4
2
ω2
D5, D6
5
6
• VD5 is found by Case 3 analysis:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
X
VA
VB
V
B|A
A
B
V
C|A
0V
C
VC
1 mm = 5 mm/s
- 90. C
B
A
O2 O4
3 4
2
ω2
D5, D6
5
6
• VD5 : only the direction is known
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
X
VA
VB
V
B|A
A
B
V
C|A
dir(VD5
)
0V
C
VC
1 mm = 5 mm/s
- 91. C
B
A
O2 O4
3 4
2
ω2
D5, D6
5
6
• VD5|C : only the direction is known
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
X
VA
VB
V
B|A
A
B
V
C|A
dir(VD5
)
0V
dir(VD5|C
)
C
VC
1 mm = 5 mm/s
- 92. C
B
A
O2 O4
3 4
2
ω2
D5, D6
5
6
• Measuring:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
X
VA
VB
V
B|A
A
B
VD5
V
C|A
dir(VD5
)
0V
dir(VD5|C
)
VD5|C
C
D5
VC
1 mm = 5 mm/s
X
- 93. C
B
A
O2 O4
3 4
2
ω2
D5, D6
5
6
• ω5 is found immediately from:
Relative Velocity Analysis
MECH 335 Lecture Notes
© R.Podhorodeski, 2009
VA
VB
V
B|A
A
B
VD5
V
C|A
dir(VD5
)
0V
dir(VD5|C
)
VD5|C
C
D5
VC
1 mm = 5 mm/s
X X X