Robotic Arm C# ATmega
•
0 likes•119 views

A Robotic Arm Based in Arduino Uno Heart ATmega 328 and Controlled Via Windows C# Application.

Recommended
More Related Content
What's hot
What's hot (15)
Similar to Robotic Arm C# ATmega
Similar to Robotic Arm C# ATmega (20)
Recently uploaded
Recently uploaded (20)
Robotic Arm C# ATmega
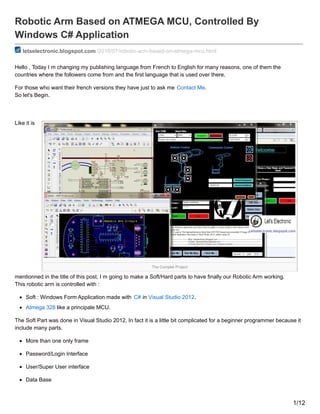
- 1. The Complet Project Robotic Arm Based on ATMEGA MCU, Controlled By Windows C# Application letselectronic.blogspot.com /2016/07/robotic-arm-based-on-atmega-mcu.html Hello , Today I m changing my publishing language from French to English for many reasons, one of them the countries where the followers come from and the first language that is used over there. For those who want their french versions they have just to ask me Contact Me. So let's Begin. Like it is mentionned in the title of this post, I m going to make a Soft/Hard parts to have finally our Robotic Arm working. This robotic arm is controlled with : Soft : Windows Form Application made with C# in Visual Studio 2012. Atmega 328 like a principale MCU. The Soft Part was done in Visual Studio 2012, In fact it is a little bit complicated for a beginner programmer because it include many parts. More than one only frame Password/Login Interface User/Super User interface Data Base 1/12
- 2. How servos work Serial Communication More Than One Frame:Because the complexity of the work and also because there is a possibility to add a camera interface, I chose to implement my work in more than one frame. Password/Login InterfaceThis one will give the possibility to only registred users to control the robotic arm. User/Super user interfaceThe super user is like a master because he have the right to modify or delete or even add a normal user. Data Basewe want to print and save the position of the robotic arm every 60 secondes in an array composed from 4 collumns (User,Time,Date and Position). Now the Hard side of this project is how MCU like ATmega 328 is able to control many servo motors in the same time. We have to know exactly how a MCU could control one servomotor and for this: I recommend to read this post click me. How the Soft/Hard Parts will communicate with each others ? The answer is UART (universal Asynchrone Receiver Transmitter) and for those how dont know it yet, just take a look here Click Me. Our goal is not to control only one but 4,5,6 or even more in the same moment. and that's need a few things to understand like how to manage the energy and how program will be like. Let's imagine thats we have a tram including some data who will be sent from the soft side of the project and readable in the MCU. Here the MCU will react with every data one by one, converting every one to an information or order to the servo- motors. Why we chose Atmega 328 ? ATmega 328 is cheaper than Arduino Programming ATmega is easier than PIC or 8051 or one other MCU. How Programming ATmega is easier ? We are all agree that's programming Arduino is the easier one so let's take advantage from Arduino here. If you read this:Arduino . Arduino Uno for exemple is a platform who contains like a principal MCU ATmega 328. so you have just to follow those steps: Take out this ATmega 328 Replaced by the one that's we are going to used in your project 2/12
- 3. ATmega 328 Arduino/ATmega328 Connection Pin TTL/Serial Converter Type your program like you are programming Arduino Take it back You have just to remember every I/O in Arduino uno is connected to wich one in ATmega328. For that Take a look here After Programming our MCU, we have to add some electronics composants to make it work like (Capacitor,Quartz, TTL/Serial Converter,....). Serial/TTL Converter is the circuit able to make data passed from MCU readable in the computer. The same comportement in the other direction. This is The complet Circuit that's you have to do: And The Program that we will place it ine the MCU's Mmemory is: /* Robotic Arm Controlled by C# Windows Application * Contact Me : Aymenlachkem@gmail.com */ #include <Servo.h> Servo Servo1, Servo2, Servo3; String readString, firstString, secondString, thirdString; int Goal1, Goal2, Goal3; void setup() { Serial.begin(9600); Servo1.attach(9); Servo2.attach(10); Servo3.attach(11); 3/12
- 4. ROBOTIC ARM BY AYMEN LACHKHEM Servo3.attach(11); } void loop() { boolean Done = false ; while (Serial.available()) { delay(1); if (Serial.available() >0) { char c = Serial.read(); readString += c; } } if (readString.length() == 1){ONE_BUTTON_CONTROL();} if (Serial.read() == '9'){if (Done){Serial.write("Done"); }} if (readString.length() == 9) {Command_Control();} } void ONE_BUTTON_CONTROL(){ if (Serial.read() == '7'){ Servo1.write(90); Servo2.write(90); Servo3.write(90); delay(1000);} if (Serial.read() == '8'){ Servo1.write(0); Servo2.write(0); Servo3.write(0); delay(1000);} if (Serial.read() == '1') { Servo1.write(Servo1.read()+1); } if (Serial.read() == '2') { Servo1.write(Servo1.read()-1); } if (Serial.read() == '3') { Servo1.write(Servo2.read()+1); } if (Serial.read() == '4') { Servo1.write(Servo2.read()-1); } if (Serial.read() == '5') { Servo1.write(Servo3.read()+1); } if (Serial.read() == '6') { Servo1.write(Servo3.read()-1); } } void Command_Control(){ { firstString = readString.substring(0, 3); secondString = readString.substring(3, 6); thirdString = readString.substring(6, 9); char carray1[5]; firstString.toCharArray(carray1, sizeof(carray1)); 4/12
- 5. firstString.toCharArray(carray1, sizeof(carray1)); Goal1 = atoi(carray1); char carray2[5]; secondString.toCharArray(carray2, sizeof(carray2)); Goal2 = atoi(carray2); char carray3[5]; thirdString.toCharArray(carray3, sizeof(carray3)); Goal3= atoi(carray3); boolean Done = ((Servo1.read() == Goal1) && (Servo2.read() == Goal2) && (Servo3.read() == Goal3)); while (!Done) { int position1 = Servo1.read(); int position2 = Servo2.read(); int position3 = Servo3.read(); if (position1 < Goal1){ Servo1.write(position1 + 1); } if (position1 > Goal1){ Servo1.write(position1 - 1); } if (position2 < Goal2){ Servo2.write(position2 + 1); } if (position2 > Goal2){ Servo2.write(position2 - 1); } if (position3 < Goal3){ Servo3.write(position3 + 1); } if (position3 > Goal3){ Servo3.write(position3 - 1); } delay(20); }}} Let's Talk about Soft part of This project : A windows Application written with C# inside VisualStudio 2012 who have acces to every port Com in the computer will detect our Circuit Com and control the robotic arm through him To Make a C# project like i mentionned before there is two part of work to do (Design/Program). I m working an a new playlist youtube video tutoriel about C# electronic oriented. As soon as possible i will publish it here. And here is the robotic Arm Application frame by frame: 5/12
- 6. Frame 1 using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Threading.Tasks; using System.Windows.Forms; using System.Diagnostics; namespace Robotic_Arm_By_Aymen_Lachkhem { public partial class Robotic_Arm_By_Aymen_Lachkhem : Form { public Robotic_Arm_By_Aymen_Lachkhem() { InitializeComponent(); textBox5.PasswordChar = '*'; } private void Form1_Load(object sender, EventArgs e) { } private void dateTimePicker1_ValueChanged(object sender, EventArgs e) { } private void button4_Click(object sender, EventArgs e) 6/12
- 7. private void button4_Click(object sender, EventArgs e) { ProcessStartInfo startInfo = new ProcessStartInfo("iexplore.exe", "http://https://letselectronic.blogspot.com/p/blog-page.html/"); Process.Start(startInfo); } private void button2_Click(object sender, EventArgs e) { this.Close(); } private void button3_Click(object sender, EventArgs e) { MessageBox.Show("In Construction"); } private void button6_Click(object sender, EventArgs e) { MessageBox.Show("In Construction"); } private void button2_Click_1(object sender, EventArgs e) { var myLines = new List<string>(); myLines.Add("Hello, This Windows application give their Users the ability to control serially or with wirless communication a 3 axes robotic arm."); myLines.Add("- The MCU used is The high-performance Atmel 8-bit AVR RISC-based microcontroller ATmega 328 "); myLines.Add("- The Control Application was made in Visual Studio 2012, written using C# "); myLines.Add(" "); myLines.Add("----------------------------------------- Blog: Letselectronic.blogspot.com -------------------------------------------------------------------------------"); myLines.Add("----------------------------------------- Contact: Aymenlachkem@gmail.com - -------------------------------------------------------------------------"); myLines.Add("----------------------------------------- Youtube Channel: Youtube.com/c/AymenLachkem ---------------------------------------------------"); textBox1.Lines = myLines.ToArray(); } private void Visit_My_Blog_Click(object sender, EventArgs e) { ProcessStartInfo startInfo = new ProcessStartInfo("iexplore.exe", "http://www.letselectronic.blogspot.com/"); Process.Start(startInfo); } private void button1_Click(object sender, EventArgs e) { Add_user frm = new Add_user(); frm.Show(); } private void Get_The_Code_Click(object sender, EventArgs e) { MessageBox.Show("Just Contact Me :)"); } private void Login_Click(object sender, EventArgs e) { string super_user = "aymen_lachkhem"; string super_pass = "engineer"; if ((textBox4.Text == super_user || textBox4.Text == Add_user.user) && (textBox5.Text == super_pass || textBox5.Text == Add_user.pass)) { Main frm = new Main(); 7/12
- 8. Frame 2 Main frm = new Main(); frm.Show(); MessageBox.Show("Welcome"); } else { MessageBox.Show("Check Again Please"); } } } } 8/12
- 9. using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Threading.Tasks; using System.Windows.Forms; namespace Robotic_Arm_By_Aymen_Lachkhem { public partial class Add_user : Form { public static string user = "0000"; public static string pass = "0000"; public Add_user() { InitializeComponent(); } private void button1_Click(object sender, EventArgs e) { this.Hide(); } private void Exit_Click(object sender, EventArgs e) { this.Close(); } private void Register_Click(object sender, EventArgs e) { if (textBox4.Text == "" || textBox5.Text == "" || textBox6.Text == "") { MessageBox.Show("Please provide User Name and Password"); return; } else { if (textBox5.Text == textBox6.Text) { user = textBox4.Text; Robotic_Arm_By_Aymen_Lachkhem frm = new Robotic_Arm_By_Aymen_Lachkhem(); pass = textBox5.Text; Robotic_Arm_By_Aymen_Lachkhem frm1 = new Robotic_Arm_By_Aymen_Lachkhem(); MessageBox.Show("Welcome"); } else { MessageBox.Show("Differents Passwords"); } } } } } 9/12
- 10. Frame3 using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Threading.Tasks; using System.Windows.Forms; using System.IO.Ports; namespace Robotic_Arm_By_Aymen_Lachkhem { public partial class Main : Form { public Main() { InitializeComponent(); getAvailablePorts(); } void getAvailablePorts() { string[] Ports = SerialPort.GetPortNames(); portcom.Items.AddRange(Ports); } private void label1_Click(object sender, EventArgs e) { } private void connecter_Click(object sender, EventArgs e) { try { if (portcom.Text == "" || baudrate.Text == "") { textbox1.Text = "Please select port setting ? "; } else 10/12
- 11. else { serialPort1.PortName = portcom.Text; serialPort1.BaudRate = Convert.ToInt32(baudrate.Text); progressBar1.Value = 100; } } catch (UnauthorizedAccessException) { baudrate.Text = "Unauthorized Access"; } } private void button2_Click(object sender, EventArgs e) { serialPort1.Close(); progressBar1.Value = 0; } private void button1_Click(object sender, EventArgs e) { this.Close(); } private void annuler_Click(object sender, EventArgs e) { this.Hide(); } private void button4_Click(object sender, EventArgs e) { serialPort1.Open(); serialPort1.Write("6"); serialPort1.Close(); } private void button3_Click(object sender, EventArgs e) { serialPort1.Open(); serialPort1.Write("5"); serialPort1.Close(); } private void button5_Click(object sender, EventArgs e) { serialPort1.Open(); serialPort1.Write("3"); serialPort1.Close(); } private void turn_on_Click(object sender, EventArgs e) { serialPort1.Open(); serialPort1.Write("7"); serialPort1.Close(); } private void turn_off_Click(object sender, EventArgs e) { serialPort1.Open(); serialPort1.Write("8"); serialPort1.Close(); serialPort1.Close(); } private void button10_Click(object sender, EventArgs e) { textBox3.Clear(); 11/12
- 12. textBox3.Clear(); serialPort1.Open(); serialPort1.Write("9"); string retour = serialPort1.ReadLine(); textBox3.Text += retour + "n"; serialPort1.Close(); } private void button8_Click(object sender, EventArgs e) { serialPort1.Open(); serialPort1.Write("1"); serialPort1.Close(); } private void button7_Click(object sender, EventArgs e) { serialPort1.Open(); serialPort1.Write("2"); serialPort1.Close(); } private void button6_Click(object sender, EventArgs e) { serialPort1.Open(); serialPort1.Write("4"); serialPort1.Close(); } private void button9_Click(object sender, EventArgs e) { serialPort1.Open(); serialPort1.Write(textBox2.Text); serialPort1.Close(); textBox2.Clear(); } } } I have all files of this project collected in compressed directory so just contact me to have your free files . See you Soon AYMEN LACHKHEM 12/12