![Probabilistic Roadmap (PRM) free space [Kavraki, Svetska, Latombe,Overmars, 95] m b m g milestone local path](https://image.slidesharecdn.com/probabilistic-roadmaps-1227299627711378-9/75/Probabilistic-Roadmaps-7-2048.jpg)
![Two Tenets of PRM Planning Checking sampled configurations and connections between samples for collision can be done efficiently. Hierarchical collision checking [Hierarchical collision checking methods were developed independently from PRM, roughly at the same time] A relatively small number of milestones and local paths are sufficient to capture the connectivity of the free space. Exponential convergence in expansive free space (probabilistic completeness)](https://image.slidesharecdn.com/probabilistic-roadmaps-1227299627711378-9/75/Probabilistic-Roadmaps-8-2048.jpg)
![Two Tenets of PRM Planning Checking sampled configurations and connections between samples for collision can be done efficiently. Hierarchical collision checking [Hierarchical collision checking methods were developed independently from PRM, roughly at the same time] A relatively small number of milestones and local paths are sufficient to capture the connectivity of the free space. Exponential convergence in expansive free space (probabilistic completeness)](https://image.slidesharecdn.com/probabilistic-roadmaps-1227299627711378-9/75/Probabilistic-Roadmaps-9-2048.jpg)

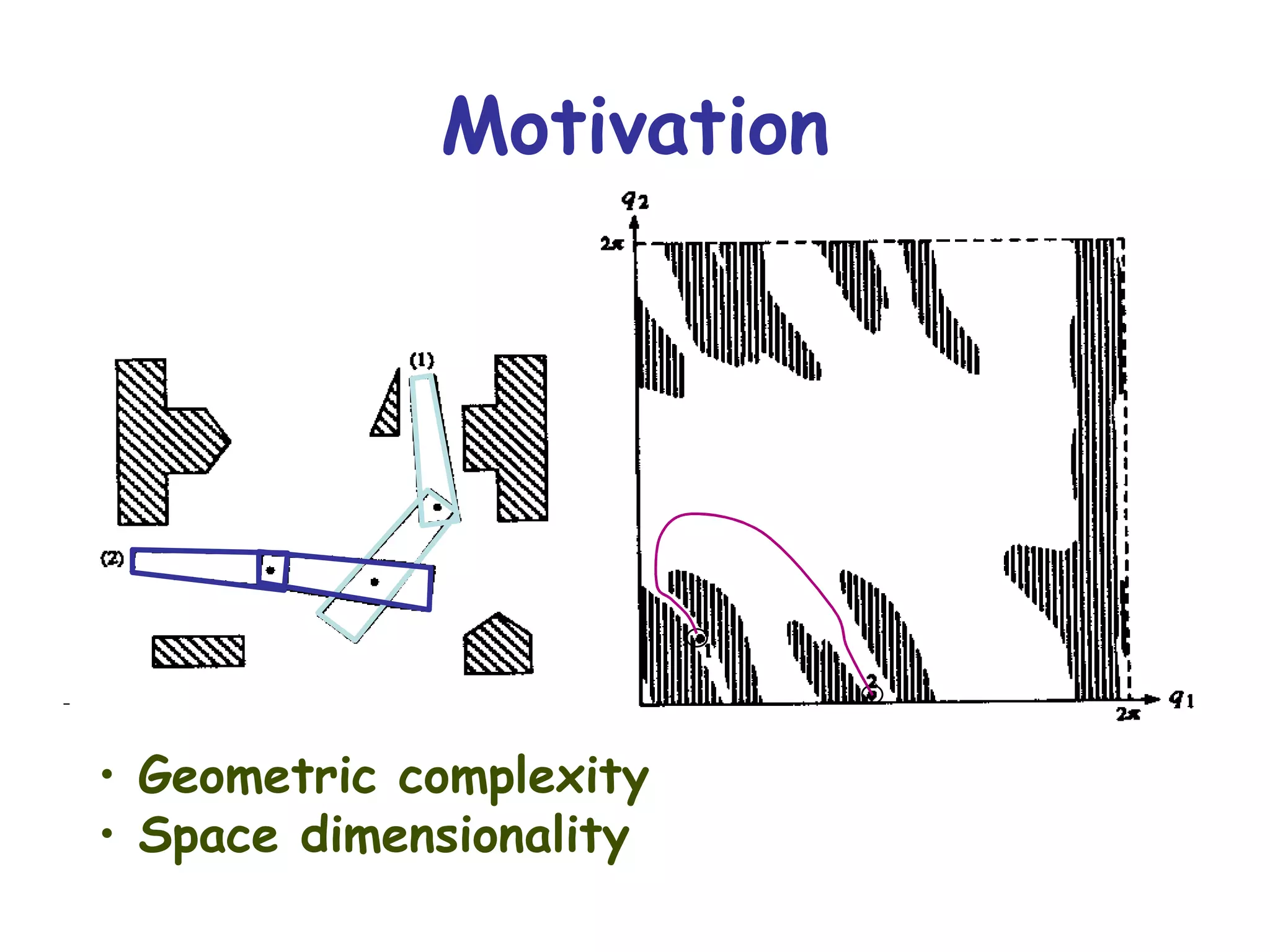
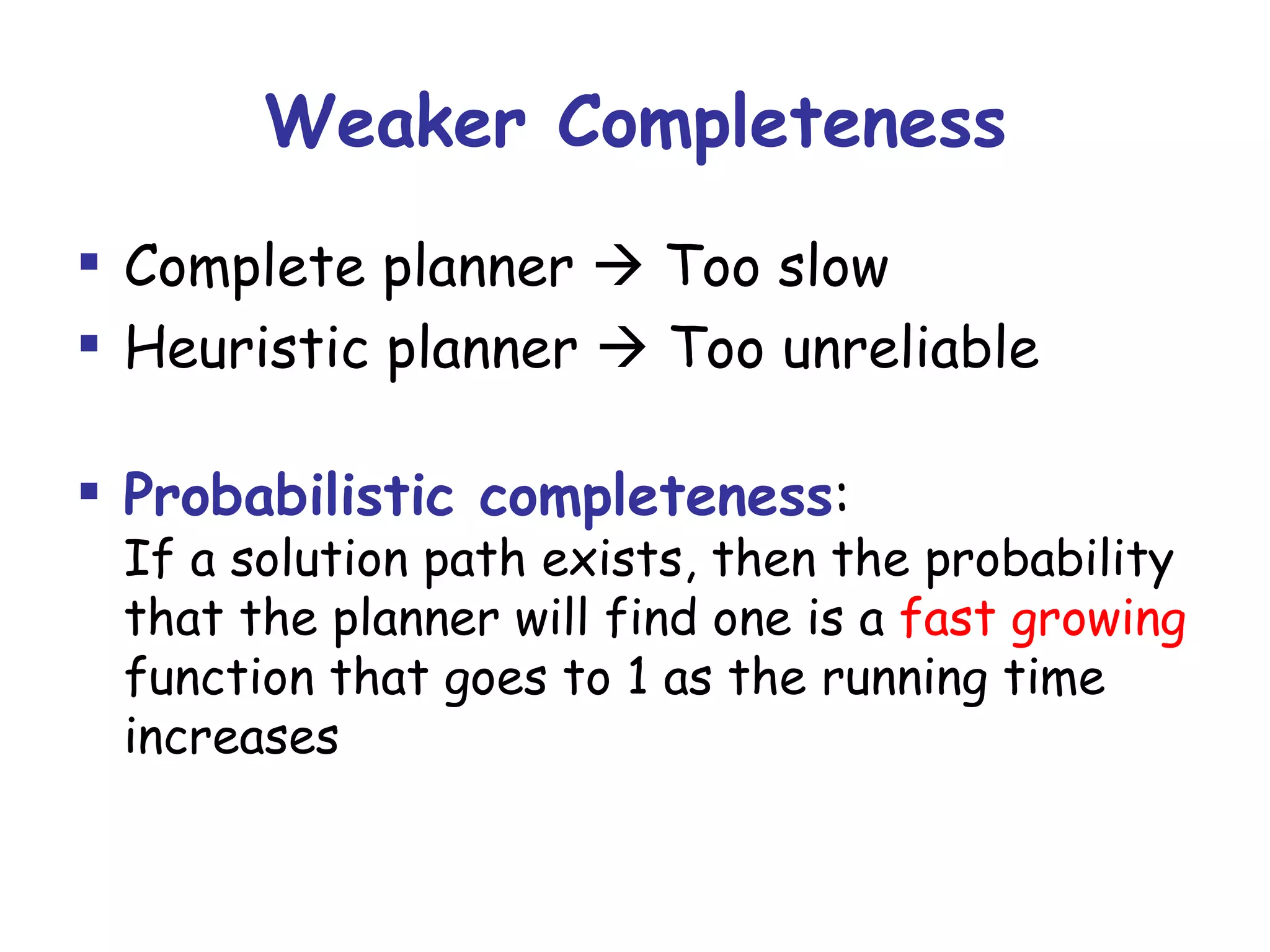
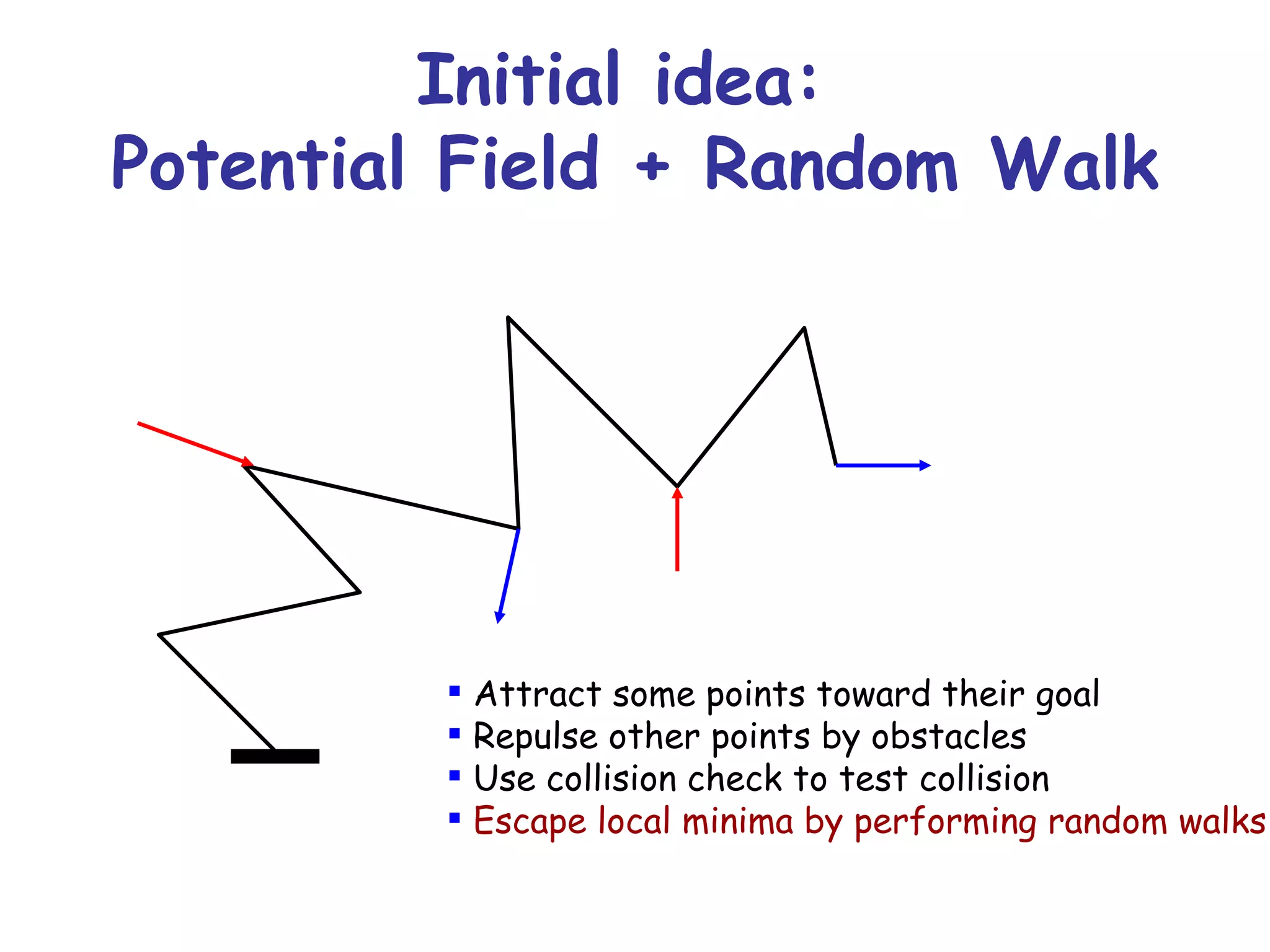
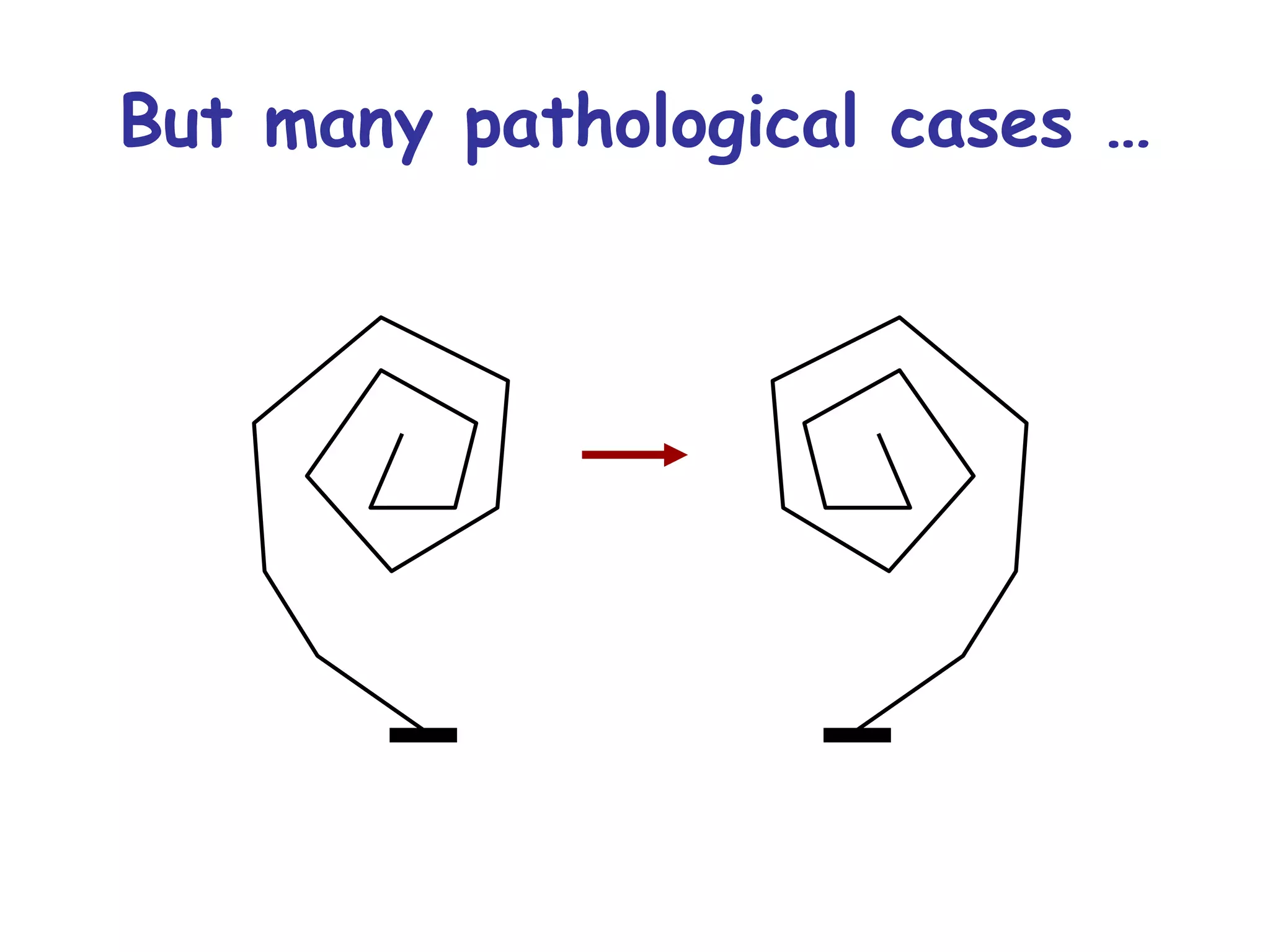
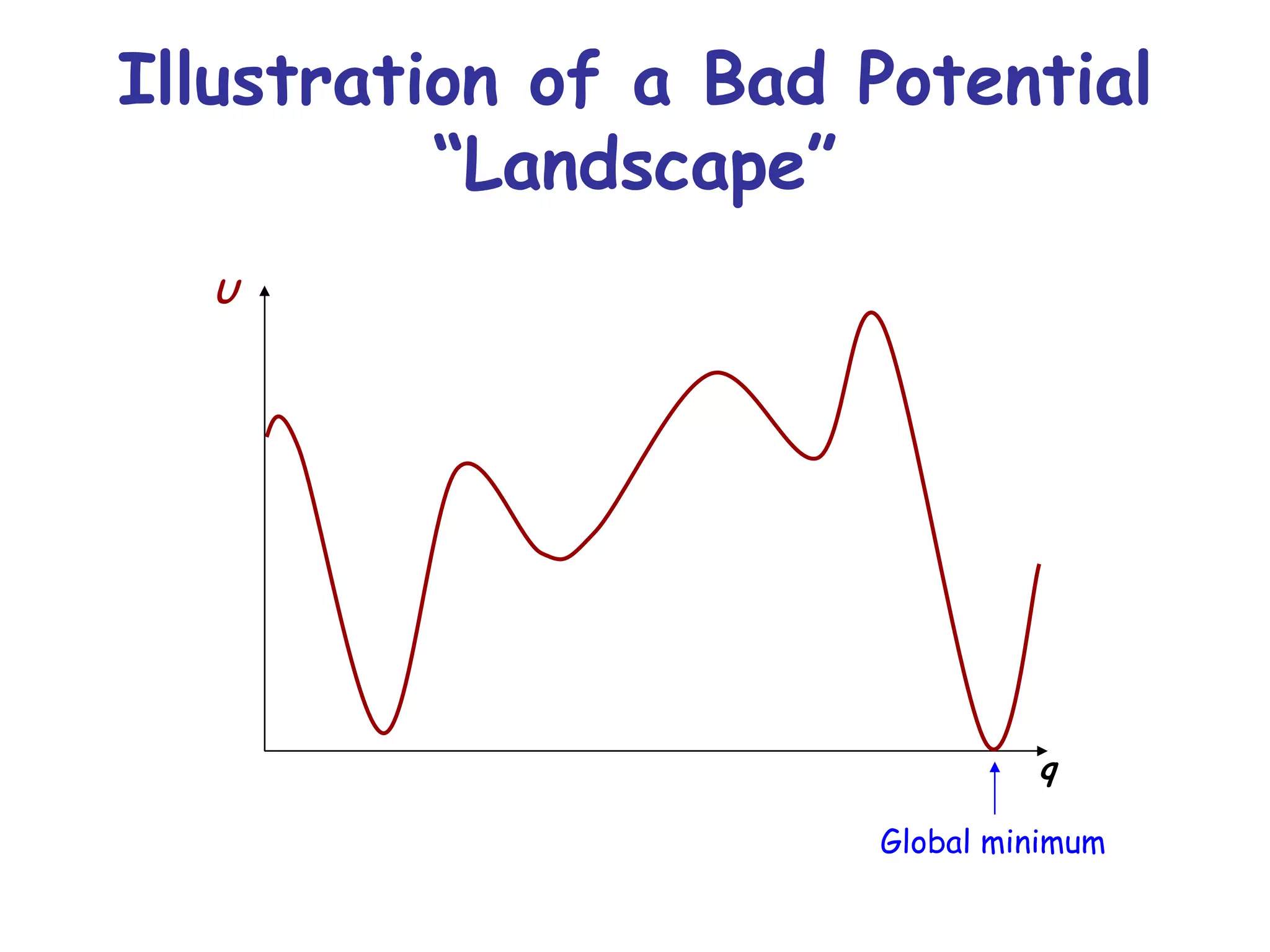
The document discusses probabilistic roadmaps (PRM), a motion planning technique. PRM was developed as an alternative to potential field and heuristic planners that are either too slow or unreliable. PRM works by sampling configurations in free space and connecting nearby configurations with local paths if collision-free. This captures the connectivity of free space using relatively few milestones and paths. PRM has probabilistic completeness, meaning the probability of finding a solution increases exponentially as planning time increases, if a solution exists.