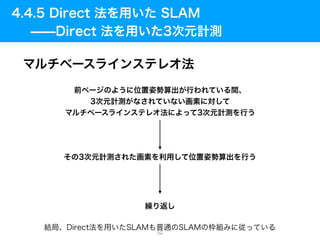
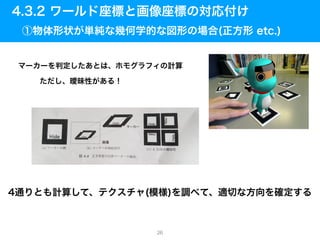
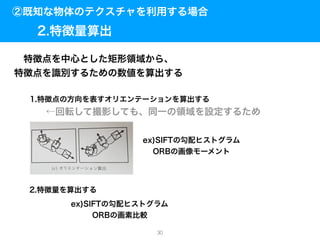
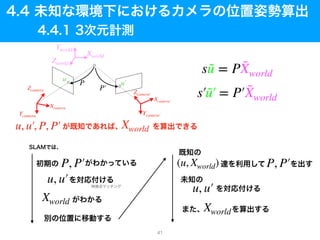
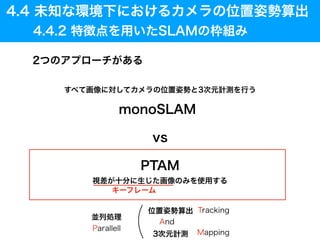
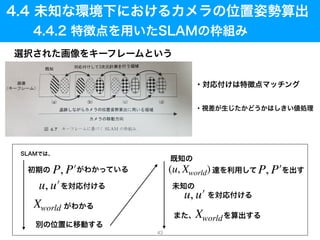
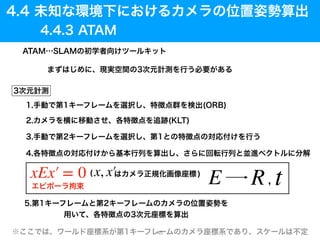
1. The document discusses computer vision techniques for augmented reality. It covers topics like camera calibration, 3D reconstruction, and tracking algorithms.
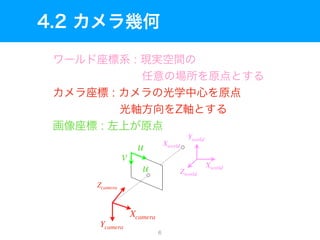
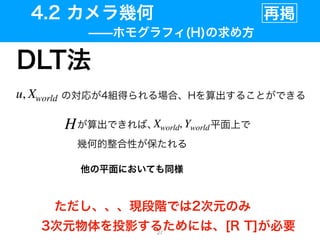
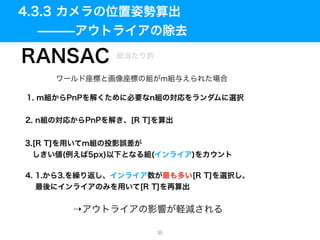
2. Key aspects covered include using camera intrinsics and extrinsics to relate the camera coordinate system to the world coordinate system. It also discusses estimating rotation and translation parameters from 2D point correspondences.
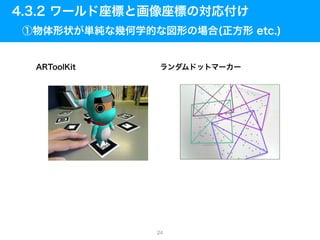
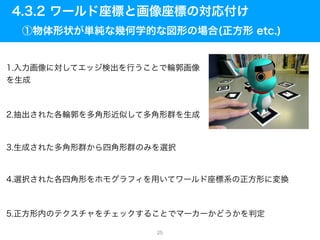
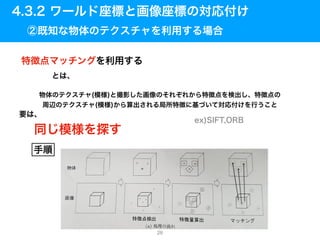
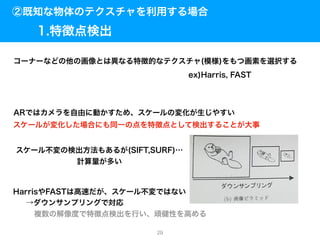
3. Techniques for tracking objects over multiple frames are summarized, including minimizing errors between current and previous frame projections and refining estimates using bundle adjustment.


![[
u
v
1]
fu 0 cu
0 fv cv
0 0 1
r11 r12 r13 t1
r21 r22 r23 t2
r31 r32 r33 t3
Xworld
Yworld
Zworld
1
s =
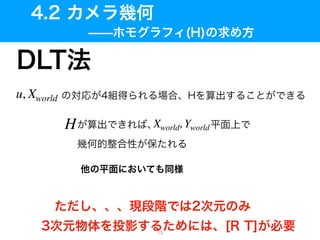
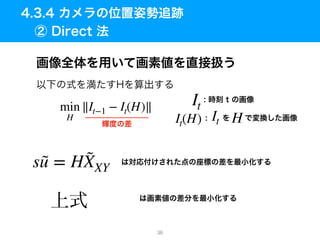
s ˜u = K [r1 r2 r3 T] ˜Xworld
s ˜u = K [R T] ˜Xworld
Xworld u
7](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-7-320.jpg)
![˜Xcamera =
[
R T
0T
1]
˜Xworld
Xcamera = RXworld+T
9](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-9-320.jpg)
![Xworld =
[
0
0
0] Xcamera = T
T =
[
0
0
0]
Xworld =
[
1
0
0]
Xcamera = r1
Xcamera = RXworld+T
˜Xcamera =
[
R T
0T
1]
˜Xworld
r1
Xworld
10](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-10-320.jpg)
![s ˜u = K [E 0] ˜Xcamera
Xcamera
u
s ˜u = K [R T] ˜Xworld
˜Xcamera =
[
R T
0T
1]
˜Xworld
Xworld
11](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-11-320.jpg)
![Zworld = 0
s ˜u = K [r1 r2 r3 T]
Xw
Yw
0
1
= K [r1 r2 T]
Xworld
Yworld
1
= H ˜XXY
12](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-12-320.jpg)
![[b1 b2 b3] = ± K−1
H
λ =
∥b1∥ + ∥b2∥
2
[r1 r2 T] =
1
λ
[b1 b2 b3]
r3 = r1 × r2
Xworld Yworld Zworld
14](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-14-320.jpg)
![s ˜u = K [R T] ˜Xworld
s ˜u = H ˜XXY
15](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-15-320.jpg)
![Xworld
uXworld
[R T]
17](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-17-320.jpg)
![s ˜u = K [R T] ˜Xworld
[R T]
19](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-19-320.jpg)
![[
u
v
1]
fu 0 cu
0 fv cv
0 0 1
r11 r12 r13 t1
r21 r22 r23 t2
r31 r32 r33 t3
Xworld
Yworld
Zworld
1
s =
s ˜u = K [r1 r2 r3 T] ˜Xworld
s ˜u = K [R T] ˜Xworld
Xworld u
21](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-21-320.jpg)
![H
[R T]
33](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-33-320.jpg)
![[Rt−1 Tt−1]
[Rt Tt]
E =
∑
i
∥u′i − proj(K, R, T, Xwi)∥2
s ˜u = K [R T] ˜Xworldproj
i
Xwi
34](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-34-320.jpg)
![P = K [R T]
s ˜u = P ˜Xworld
[R T]
P
Xworld u
40](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-40-320.jpg)
![E =
∑
i
∑
j∈Fi
∥u′j − proj(K, Ri, Ti, Xwj)∥2
i
j
Fi i
[R T]
Xwj
E =
∑
i
∥u′i − proj(K, R, T, Xwi)∥2
[R T]
<cf.>
44](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-44-320.jpg)
![Xcamera = RworldXworld + Tworld
Xcamera = s(RatamXatam + Tatam)
Xcamera
XcameraXatam s T
Xatam = R
Xworld
s
+ T
= R′Xworld + T
R
[
Rworld Tworld
0T
1 ]
=
[
sRatam sTatam
0T
1 ] [
R′ T
0T
1]
Yatam
Zatam
Xatam
Zcamerai
Ycamerai
Xcamerai
Zcameraj
Xcameraj
Ycameraj
47](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-47-320.jpg)
![Xworld =
[
0
0
0] Xcamera = T
T =
[
0
0
0]
Xworld =
[
1
0
0]
Xcamera = r1
Xcamera = RXworld+T
˜Xcamera =
[
R T
0T
1]
˜Xworld
r1
Xworld
48](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-48-320.jpg)
![[
Rworld Tworld
0T
1 ]
=
[
sRatam sTatam
0T
1 ] [
R′ T
0T
1]
s
i, j
Tworldi = sRatamiT + sTatami
Tworldj = sRatamjT + sTatamj
s =
∥Tworldi − RatamiR−1
atamjTworldj∥
∥Tatami − RatamiR−1
atamjTatamj∥
[R T]s
[Rworldi Tworldi] [Rworldj Tworldj]
[Ratami Tatami] [Ratamj Tatamj]
49](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-49-320.jpg)
![M = [R T]
min
M
∥I − Ir(M)∥
M
M
51](https://image.slidesharecdn.com/computervisionforar-190426072017/85/slide-51-320.jpg)