Www2.hcmuaf.edu.vn data hnky_file_tài liệu xstk_tom tat cong thuc xstk
Phuoc_DIU_KHIN_TI_U_VA_DIU_KHIN_T.pdf
1. GS. Nguyễn Doãn Phước 1
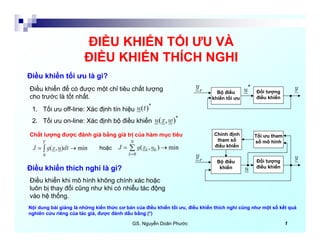
Đi u khi n t i u là gì?
Điều khiển để có được một chỉ tiêu chất lượng
cho trước là tốt nhất.
ĐI U KHI N T I U VÀ
ĐI U KHI N THÍCH NGHI
Đi u khi n thích nghi là gì? u
y
r
y
Đ i t ợng
đi u khi n
T i u tham
s mô hình
Chỉnh định
tham s
đi u khi n
Bộ đi u
khi n
*
u y
r
y
Đ i t ợng
đi u khi n
Bộ đi u
khi n t i u
1. Tối ưu off-line: Xác định tín hiệu
2. Tối ưu on-line: Xác định bộ điều khiển
Chất l ợng đ ợc đánh giá bằng giá trị c a hàm mục tiêu
*
( )
u t
*
( , )
u x w
Điều khiển khi mô hình không chính xác hoặc
luôn bị thay đổi cũng như khi có nhiễu tác động
vào hệ thống.
0
( , ) min
T
J g x u dt
hoặc
0
( , ) min
N
k k
k
J g x u
Nội dung bài giảng là những ki n th c cơ bản c a đi u khi n t i u, đi u khi n thích nghi cũng nh một s k t quả
nghiên c u riêng c a tác giả, đ ợc đánh dấu bằng (*)
2. GS. Nguyễn Doãn Phước 2
T i u hóa
Phát bi u bài toán và phân loại
Những ph ơng pháp cơ bản
ng dụng vào đi u khi n
Tối ưu hóa
1. Không ràng buộc, nếu . Khi đó nó được viết thành:
2. Có ràng buộc, nếu
3. Lồi, nếu là tập lồi và là hàm lồi
* 1
argmin ( ), , ,
T
n
p P
p J p p p p
n
P R * argmin ( )
p J p
n
P R
P ( )
J p
Không ràng buộc:
1. Gradient
2. Newton-Raphson
3. Gauss-Newton
Có ràng buộc:
1. QP
2. SQP
3. Interior point
1. Nhận dạng tham số mô hình
2. Xác định tham số tối ưu cho bộ điều khiển
3. Điều khiển dự báo
3. GS. Nguyễn Doãn Phước 3
ng dụng t i u hóa
Nhận dạng tham s mô hình đ i t ợng đi u khi n
Zadeh (1962): Nhận dạng là xác định một mô
hình toán cụ thể cho hệ thống từ lớp các mô hình
thích hợp, trên cơ sở quan sát các tín hiệu vào
ra, sao cho sai lệch giữa nó với hệ thống là nhỏ
nhất.
Đ i t ợng đi u
khi n
Thuật toán nhận dạng đ i
t ợng
u y
0
N
k
u 0
N
k
y
Kết quả: Mô hình
toán của đối tượng
Phát bi u bài toán nhận dạng on-line
1. Hàm truyền
2. Đo tín hiệu vào ra rồi từ đó xác định các tham số của mô hình
là sao cho kỳ vọng (giá trị trung bình) của bình phương sai
lệch giữa mô hình với đối tượng là nhỏ nhất.
1
0 1
1
1
( )
1
m
m
n
n
b b z b z
G z
a z a z
, , 1, ,
k k
u y k N
0 1
, , , , ,
m n
b b a a
Chú ý: Phải đảm bảo tín hiệu vào ra đo đ ợc là đang ở giai đoạn quá độ c a hệ th ng
4. GS. Nguyễn Doãn Phước 4
Hai tr ờng hợp áp dụng:
1. Khi nhiễu là có thể bỏ qua được (không có nhiễu)
2. Khi có nhiễu vào ra là egodic, không tương quan với tín hiệu vào ra tương ứng và bản
thân 2 nhiễu đó cũng không tương quan với nhau.
Khi không có nhiễu
1
*
1 0
1 1
1
, , , , ,
, , , , ,
, , , , ,
T T
n m
T T
N N
T
k k n k k m
k
p X DX X Dy
p col a a b b
y col y y X col x x
x y y u u
trong đó:
và là ma trận trọng số
Khi có nhiễu vào ra (*)
Sử dụng lại công thức trên, trong đó các vector được thay bởi dãy giá trị hàm tương
quan của các tín hiệu vào ra:
,
T
k
x y
/
(0), , ( )
( 1), , ( ), ( ), , ( )
uy uy
T
uy uy u u
l
y col r r N
x col r l r l n r l r l m
với
/
5
N N
( )
i
D diag d
Nhận dạng on-line tham s mô hình hàm truy n
k
u
u
n
1, , n
a a
k
y
y
n
Đ i t ợng
đi u khi n
Thuật toán
nhận dạng
0, , m
b b
5. GS. Nguyễn Doãn Phước 5
Quan sát trạng thái t i u
1. Mô hình trạng thái
2. Đo tín hiệu vào ra trong quá khứ rồi từ đó xác định trạng
thái của hệ ở thời điểm hiện tại sao cho tổng bình phương sai lệch giữa
trạng thái quan sát được và trạng thái thực là nhỏ nhất.
, , 0,1, ,
k i k i
u y i N
k
x a
t kT
1
k k k
k k k
x Ax Bu
y Cx Du
k
u k
y
k
x
Đ i t ợng
đi u khi n
Bộ quan sát
t i u
ng dụng t i u hóa
K t quả:
1
1
2
1
, , ,
k N
N T T N
k
k
k
u
x A X X X a A B AB B
u
u
trong đó
1 1
1 2 3
1
1
1 2
,
k N k N
k N k N
N N N
k
k
N N N
k
k
y
C D u
y
CA CB D u
X a
u
CA y CA B CA B CB D
u
CA CA B CA B CAB CB D
y
6. GS. Nguyễn Doãn Phước 6
Quan sát trạng thái Kalman
ng dụng t i u hóa
1. Mô hình trạng thái
2. Đo tín hiệu vào ra ở thời điểm hiện tại rồi từ đó xác
định trạng thái của hệ sao cho kỳ vọng của tổng bình phương
sai lệch giữa trạng thái quan sát được và trạng thái thực
là nhỏ nhất.
,
k k
u y
k
x
1 k k
k k k k
k k k
k k k
x A x B u n
y C x D u v
k
x
k
y
k
n
k
u
k
v
Đ i t ợng
đi u khi n
Bộ quan sát
t i u Kalman
K t quả:
1. Chọn tùy ý. Thực hiện lần lượt bước tính sau với
2. Tính
k
x
1,2,
k
0
K
/
/
1 1 1
1
1 1
1 1
( ) ( )
T
k k k k
T T
k k k k k k
k k k k
k k
k k k
k k k k
k k k
k
P A K A N
L P C C P C V
K I L C P
x A x B u
x I L C x L y D u
và xuất làm trạng thái quan sát được
k
x
với là ma trận tương quan của nhiễu
N k
n
với là ma trận tương quan của nhiễu
V k
v
7. GS. Nguyễn Doãn Phước 7
Đi u khi n dự báo
ng dụng t i u hóa
Nguyên lý chung: Bộ điều khiển gồm 3 khối:
1. Khối mô hình dự báo: Có nhiệm vụ dựa vào mô
hình toán của đối tượng để xác định tín hiệu ra
tương lai phụ thuộc vào dãy các giá
trị tín hiệu điều khiển tương lai
2. Hàm mục tiêu được
xây dựng từ chỉ tiêu chất lượng muốn có của hệ.
Chẳng hạn:
, 0
k i
y i N
, ,
k k N
u u
( ), ( , , )
k k N
J p p col u u
0
( ) ( ) ( )
N
T
T
k i k i k i k i
k i k i
i
J p w y Q w y u Ru
khi chất lượng yêu cầu là bám ổn định, trong đó là hai ma trận đối xứng xác
định dương tùy chọn.
3. Tối ưu hóa: Là thuật toán tối ưu được áp dụng để tìm nghiệm . Trong
số nghiệm tối ưu tìm được thì chỉ sử dụng phần tử đầu tiên
,
Q R
*
arg min ( )
N
p U
p J p
* *
*
( , , )
k k N
p col u u
*
k
u
Cửa sổ dự báo
t
k k N
1
k
8. GS. Nguyễn Doãn Phước 8
Kết quả: Sử dụng hàm mục tiêu:
sẽ được
trong đó
Đi u khi n dự báo hệ tuy n tính
ng dụng t i u hóa
Mô tả bài toán: Cho hệ tuyến tính
Xây dựng bộ điều khiển dự báo để tín hiệu ra bám theo tín hiệu mẫu
1
k k k
k k k
k
x Ax Bu
y Cx Du v
2 2
0
( ) ( ) min
N
i i k i
k i
k i
i
J p q y w r u
1
1 2
2 3
1 1 0
, , ,
0 0
,
T T
k
N N
k k
N N
k k
k N k N
i i
p Q R Q x w
w u CA CA B CB D
w u CA CA B D
w p
w u C D
Q diag q R diag r
,0, ,0
k
u I p
k
y k
w
với nhiễu k
v
9. GS. Nguyễn Doãn Phước 9
Đi u khi n t i u
Phát bi u bài toán
Phân loại
Bài toán liên tục:
Xét hệ . Hãy xác định đưa hệ đi từ tới trong
khoảng thời gian để với nó có được
( , )
x f x u
( )
u t U
0 (0)
x x
( )
T
x x T
T
0
( ) ( , ) min
T
J u g x u dt
Bài toán không liên tục:
Xét hệ . Hãy xác định đưa hệ đi từ tới trong khoảng
thời gian để với nó có được
1 ( , )
k k k
x f x u
{ }
k
u U
0
x N
x
N
0
( ) ( , ) min
N
k k
k
J u g x u
1. Theo trạng thái đầu là cho trước hoặc bất kỳ
2. Theo trạng thái cuối là cho trước hoặc bất kỳ
3. Theo thời gian xảy ra quá trình tối ưu là cho trước hoặc cũng là biến tối ưu cần tìm
10. GS. Nguyễn Doãn Phước 10
Đi u khi n t i u
Ph ơng pháp bi n phân
Chủ yếu áp dụng cho bài toán liên tục. Ngoài ra khoảng thời gian là phải cho trước, trong
khi trạng thái đầu và cuối thì có thể cho trước hoặc bất kỳ. Tập ràng buộc phải hở.
Các bước thực hiện:
T
1. Lập hàm Hamilton: với là biến đồng trạng thái
2. Xác định quan hệ từ điều kiện cần:
3. Sử dụng thêm quan hệ Euler-Langange trong đó biến phải thỏa mãn
điều kiện biên:
( , , ) ( , ) ( , )
T
H x u p p f x u g x u
p
( , )
u x p 0T
H
u
T
H
p
x
p
khi có điểm trạng thái đầu là bất kỳ
khi có điểm trạng thái cuối là bất kỳ
(0) 0
( ) 0
p
p T
0
x
Tính chất cơ bản của hàm Hamilton: Dọc theo quỹ đạo tối ưu thì hàm Hamilton sẽ:
1. Có giá trị là hằng số
2. Nếu là bất kỳ và thì có giá trị bằng 0
T
x T
T
x
11. GS. Nguyễn Doãn Phước 11
Đi u khi n t i u
Một số điều kiện đủ để hệ kín ổn định:
1. Khi bài toán có
2. Khi nghiệm phương trình Riccati có
3. Khi cặp ma trận là quan sát được, trong đó
4. Luôn có với mọi vector riêng bên phải của
Bộ đi u khi n LQR liên tục
Với bài toán có hệ là tuyến tính, hàm mục tiêu dạng toàn phương và :
thì tín hiệu điều khiển tối ưu có dạng on-line: trong đó là nghiệm
của phương trình đại số Riccati
Bộ điều khiển LQR:
T
1 T
u R B Px
0
, ( ) , 0, 0
T T T T
x Ax Bu J u x Qx u Ru dt Q Q R R
0
T
P P
1 T T
PBR B P A P PA Q
0
T
Q Q
0
T
P P
( , )
a
A Q T
a a
Q Q Q
x
u Đ i t ợng
tuy n tính
Bộ đi u
khi n LQR
0
i
Qa i
a A
1 T
LQR
R R B P
12. GS. Nguyễn Doãn Phước 12
1. Tại thời điểm đo và tùy chọn đối xứng xác định dương
2. Tính thỏa mãn và
3. Xác định với
4. Đưa vào điều khiển và quay về 1. để tính tại thời điểm
Bài toán: Cho hệ song tuyến
và tín hiệu mẫu . Hãy tìm bộ điều khiển phản hồi trạng thái để tín hiệu ra bám
theo được tín hiệu mẫu.
Đi u khi n t i u
ng dụng LQR vào đi u khi n dự báo hệ song tuy n (*)
( ) ( )
( ) ( )
x A x x B x u
y C x x D x u
k
t 1
k
t
k
t
( ) , ( ) , ( ) , ( )
k k k k k k k k
A A x t B B x t C C x t D D x t
k k
x A x B u
0 k k
s s
A x B u
( )
w t ( )
y t
Kết quả: Vì nguyên tắc điều khiển dự báo làm việc theo vòng lặp và mỗi vòng lặp cần có một
khoảng thời gian để thực hiện, mặc dù rất nhỏ, nên khi ta có thể xấp
xỉ hệ đã cho về hệ có tham số biến đổi theo thời gian như sau:
trong đó
1
k k k k
t t t t
k
,
k k
Q R
,
s s
x u ( )
k k k
s s
w t C x D u
1 T
LQR k k
R R B P
1 T T
k k k k k k
PB R B P A P PA Q
( )
LQR s s
u R x x u
u 1
k
t
k
t ( )
k
k
x x t
13. GS. Nguyễn Doãn Phước 13
Chủ yếu áp dụng cho bài toán không liên tục. Ngoài ra khoảng thời gian là phải cho trước,
trong khi trạng thái đầu và cuối thì có thể cho trước hoặc bất kỳ.
Nguyên lý Bellman: Mỗi đoạn cuối của quỹ đạo tối ưu cũng tối ưu
Hàm con được gọi là hàm Bellman
Theo nguyên lý tối ưu thì:
Các bước thực hiện:
Đi u khi n t i u
Ph ơng pháp quy hoạch động (Bellman)
N
1. Gán và
2. Tính
3. Nếu thì gán và quay về 2. Ngược lại thì dừng
1
( ) min ( , )
i
N
k i
k i
u i k
B x g x u
1 1
( ) min ( , ) ( )
k
k k k
k k k
u
B x g x u B x
( ) 0
N N
B x 1
k N
*
1
( ) argmin ( , ) ( , )
k
k
k k k k k k
u
u x g x u B f x u
* *
1
( ) ( , ) ( , )
k k
k k k k k
B x g x u B f x u
và từ đó là
0
k 1
k k
14. GS. Nguyễn Doãn Phước 14
1. Khi là hữu hạn:
2. Khi là vô hạn thì có thể gán và với là nghiệm của:
Đi u khi n t i u
Bộ đi u khi n LQR không liên tục
Với bài toán có hệ là tuyến tính, hàm mục tiêu dạng toàn phương:
trong đó có thể là hữu hạn hoặc vô hạn , thì tín hiệu điều khiển tối ưu có
dạng on-line: trong đó là nghiệm của phương trình
đại số Riccati:
1
1 1
T T
k k
k k
u R B P B B P Ax
1 1 1
0
1
,
2
N
T T T
k k k N N k k k k
k
x Ax Bu J x Lx x Qx u Ru
N
1
1 1 1 1
T T T T
k k k k k
P Q A P A A P B R B P B B P A
N N
k
P
trong đó:
N
1
N
P L
1
T T T T
P Q A PA A PB R B PB B PA
N ,
k
P P k
L P
15. GS. Nguyễn Doãn Phước 15
Đi u khi n t i u
ng dụng quy hoạch động vào đi u khi n dự báo hệ song tuy n (*)
1. Tại thời điểm đo và tùy chọn đối xứng xác định dương
2. Tính thỏa mãn và
3. Xác định
4. Đưa vào điều khiển và gán rồi quay về 1.
Bài toán: Cho hệ song tuyến
và dãy giá trị tín hiệu mẫu . Tìm bộ điều khiển phản
hồi trạng thái để đầu ra bám theo được tín hiệu mẫu.
1 ( ) ( )
( ) ( )
k k k k k
k k k k
k
x A x x B x u
y C x x D x u
( ), ( ), ( ), ( )
k k k k
k k k k
A x B x C x D x
1 k k
k k k
x x u
k k
s s s
x x u
{ }
k
w
k
y
Kết quả: Vì là phản hồi trạng thái nên ở thời điểm hiện tại,
khi đã có hệ đã cho luôn biểu diễn được dưới dạng
tham số hằng (LTI):
với
k
x
,
k k
Q R
,
s s
x u k k
k s s
w x u
1
T T
LQR k k k k
R R P P
1
T T T T
k k k k k k k k k k
P Q P P R P P
( )
LQR
k s k s
u u R x x
1
k k
k k
x
với
16. GS. Nguyễn Doãn Phước 16
Đi u khi n t i u
Nguyên lý cực đại
Là công cụ duy nhất giúp thực hiện bài toán tối ưu có khoảng thời gian xảy ra quá trình
tối ưu không cho trước, hay bản thân cũng là một biến tối ưu cần tìm
Nội dung nguyên lý (cho bài toán liên tục):
T
T
Nếu là nghiệm bài toán free end time thì:
1. Phải tồn tại ít nhất một vector biến đồng trạng thái thỏa mãn:
2. Nếu ký hiệu thì tại điểm cuối sẽ có:
3. Nếu sử dụng biến đồng trạng thái thỏa mãn quan hệ Euler-Lagrange
thì điều kiện 2 trên còn đúng với mọi , tức là dọc theo quỹ đạo tối ưu có:
4. Nếu bài toán có thêm điều kiện ràng buộc về điểm đầu hoặc điểm cuối
thì còn có: hoặc
*
u
*
argmax ( , , )
u U
u H x u p
với ( , , ) ( , ) ( , )
T
H x u p p f x u g x u
p
( , ) max ( , , )
u U
M x p H x u p
( ), ( ) 0
M x T p T
T
T
p H x
0 t T
* * * * *
( , ) ( , , ) 0
M x p H x u p
0
(0) , ( ) T
x S x T S
0
(0)
p S
( ) T
p T S
17. GS. Nguyễn Doãn Phước 17
Đi u khi n t i u
ng dụng nguyên lý cực đại vào thi t k bộ đi u khi n FTS (*)
Với hệ phi tuyến affine bậc 2 một đầu vào:
thì bộ điều khiển:
trong đó tùy chọn và là hàm thỏa mãn (luôn tồn tại):
sẽ làm hệ ổn định tiệm cận tại gốc sau khoảng thời gian hữu hạn,
tức là sau khi bị nhiễu tức thời đánh bật ra khỏi gốc thì bộ điều
khiển trên sẽ kéo hệ về trở lại gốc sau một khoảng thời gian
1 2
( ) ( ) , ( , ) , (0) 0
T
x f x h x u x x x f
sgn ( ) khi ( ) 2 ( ) ( ) ( ) 0
( ) sgn ( ) khi ( ) 0 , ( ) 0
0 khi ( ) ( ) 0
f f
f
k x x k x L x L x
u r x k x x x
x L x
( )
x
( )
( ) ( ) 0
h
x
L x h x
x
và ( ) 0,
h f
L L x x
T
0
k
1 ( )
z x
2 ( )
f
z L x
18. GS. Nguyễn Doãn Phước 18
Đi u khi n thích nghi
Tiêu chuẩn ổn định Lyapunov
Xét hệ không bị kích thích cân bằng tại gốc . Nếu
tồn tại một hàm xác định dương sao cho:
( )
x f x
(0) 0
f
( )
V x
1. thì hệ sẽ ổn định tại gốc
2. thì hệ sẽ ổn định tiệm cận tại gốc (GAS).
Khi đó được gọi là hàm Lyapunov (LF)
( ) 0
V x
( ) 0, 0
V x x
Áp dụng đ thi t k bộ đi u khi n phản hồi trạng thái
Cho hệ thỏa mãn có vector các tín hiệu
vào là . Để tìm bộ điều khiển phản hồi trạng thái làm hệ ổn
định tiệm cận tại gốc (GAS), người ta thực hiện:
(0,0) 0
f
u ( )
r x
1. Xác định một hàm xác định dương
2. Tính
3. Tìm hàm để trở thành xác định âm. Khi đó được gọi là hàm
điều khiển Lyapunov (CLF)
( )
V x
( )
r x
( )
V x
( , )
x f x u
( )
( , ) ( , )
V x
W x u f x u
x
, ( )
W x r x ( )
V x
19. GS. Nguyễn Doãn Phước 19
Đi u khi n thích nghi
Ph ơng pháp backstepping
B ớc khởi đầu c a backstepping
Xét hệ truyền ngược
trong đó là một phần vector trạng thái , có số
chiều đúng bằng số các tín hiệu vào là và ma trận
vuông kiểu là không suy biến.
( ) ( )
( , ) ( , )
x f x H x z
z x z G x z u
z
,
col x z
u
( , )
G x z
( ) ( )
x f x H x z
m
Nếu hệ con đã có hàm Lyapunov cùng một bộ điều khiển phản
hồi trạng thái thỏa mãn làm nó ổn định tiệm cận, thì hệ truyền ngược đã
cho cũng sẽ có hàm điều khiển Lyapunov là:
( )
z
V x
( )
z
r x
1
( , ) ( ) ( ) ( )
2
T
z z z
V x z V x z r x Q z r x
với là ma trận xác định dương tùy chọn
Q
m m
(0) 0
z
r
Hệ affine bậc 1: với luôn có hàm CLF là:
vì với nó hệ sẽ có bộ điều khiển phản hồi trạng thái GAS:
( ) ( )
x f x h x u
( ) 0,
h x x
2
1
( )
2
V x x
1
( ) ( ) , 0
( )
u r x ax f x a
h x
20. GS. Nguyễn Doãn Phước 20
Đi u khi n thích nghi
Đi u khi n thích nghi giả định rõ
Bài toán: Cho hệ tham số hằng bất định
trong đó là vector các tham số hằng không xác định được
của hệ. Tìm bộ điều khiển GAS.
Nguyên lý giả định rõ (certainty equivalence):
( ) ( ) ( )
x f x G x H x u
x
u Đ i t ợng
đi u khi n
Bộ đi u
khi n
Cơ cấu
chỉnh định
w
1. Giả sử đã có . Dựa vào lý thuyết Lyapunov, tìm hàm CLF và một bộ điều
khiển GAS tương ứng. Tất nhiên chúng đều phụ thuộc
2. Thay không biết bởi hàm phụ huộc thời gian . Sau đó sử dụng hàm CLF thích
nghi:
( , )
c
V x
( , )
c
r x
( )
t
1
( , ) ( , ) ( ) ( )
2
T
c
V x V x Q
với tùy chọn
0
T
Q Q
thỏa mãn điều hiển nhiên
để tìm cơ cấu chỉnh định cho tức là tìm sao cho có được xác định
âm theo (hay bán xác định âm theo )
( ) ( ) ( ) ( , ) 0
c
c
V
f x G x H x r x
x
d dt
x
dV dt
,
x
21. GS. Nguyễn Doãn Phước 21
Đi u khi n thích nghi
Một số trường hợp riêng:
1. Nếu tìm được hàm CLF không phụ thuộc thì bộ điều khiển sẽ đơn giản là:
2. Bộ điều khiển và cơ cấu chỉnh định trên vẫn sử dụng được khi chỉ có ,
với nhưng khi lại có
Bộ đi u khi n thích nghi giả định rõ (*)
Nếu có thì bộ điều khiển thích nghi của bài toán giả định rõ đã cho là:
( ) 0,
c
V
H x x
x
1. Bộ điều khiển:
2. Cơ cấu chỉnh định:
1
2
( ) ( , ) ( )
( )
( )
T
c c c
T c
c
c
V V V
H x r x Q G x
x x
V
u H x
x V
H x
x
1
( )
T
c
V
Q G x
x
( )
c
V x
( , )
c
u r x
( ) 0
c
V
H x
x
x X
( , ) 0,
f c
L V x
x X
22. GS. Nguyễn Doãn Phước 22
Ph ơng pháp backstepping thích nghi (*)
Xét hệ truyền ngược chứa tham số hằng bất định:
Giả sử hệ con trong nó là:
đã có hàm CLF thích nghi cùng bộ điều khiển GAS thỏa mãn
và một cơ cấu chỉnh định tương ứng , tức là đã có:
trong đó là hàm xác định âm, thì hệ đã cho cũng sẽ có bộ điều khiển thích nghi:
trong đó là ma trận giả nghịch đảo bên phải của , cùng với hai cơ cấu chỉnh định:
có là hai ma trận đối xứng xác định dương tùy chọn
1 1
1
2 2
2
( ) ( ) ( )
( , ) ( , ) ( , )
x f x G x H x z
z f x z G x z H x z u
1 1
1
( ) ( ) ( )
x f x G x H x z
1( , )
V x
1( , )
z r x
1(0,0) 0
r
1
( , )
p x
1 1
1 1 1 1
1 1
( ) ( ) ( ) ( , ) ( )
V V
V f x G x H x r x p W x
x
( )
W x
( ) 1
1 1 1
1 1 1 2
2 1 1 2
T
p r r V
u p f G p H z R H f G p
x x
( )
2
p
2
H
1 1
2 1
1 1 1
( , ) , ( , )
T
T r
p Q G x z R z r R G z r p x
x
,
Q R
23. GS. Nguyễn Doãn Phước 23
Bài toán cơ cở: Xét hệ LTI chứa tham số bất định (đối tượng):
trong đó là ma trận Hurwitz. Hệ sẽ điều khiển bám thích nghi
theo được hệ mẫu:
nhờ cơ cấu chỉnh định thích nghi:
trong đó là nghiệm phương trình Lyapunov
Đi u khi n thích nghi
Đi u khi n thích nghi theo mô hình mẫu
u x
Đ i t ợng
phi tuy n
Cơ cấu
chỉnh định
Mô hình
mẫu
Bộ đi u khi n
TTHCX
w
m
x
( )
x Ax B u G x
A
m m
x Ax Bw
( ) ( )
( )
T
p E B x G x Pe
G x p
T
A P PA Q
0
T
P P
với tùy chọn
0
T
Q Q
có tùy chọn
0
T
E E
với m
e x x
1. N u không Hurwitz: Bổ sung thêm
2. N u hệ là phi tuy n: Bổ sung thêm bộ đi u khi n TTHCX
A R
u x
Đ i t ợng
tuy n tính
Cơ cấu
chỉnh định
Mô hình
mẫu
w
m
x
R
24. 24
GS. Nguyễn Doãn Phước 24
Bài toán: Xác định bộ điều khiển để các biến khớp
bám tiệm cận theo được quỹ đạo mẫu cho trước
Chuyển về dạng mô hình trạng thái:
1. Mô hình tường minh
2. Mô hình tham số bất định
3. Mô hình với tác động nhiễu
4. Mô hình bất định với tác động nhiễu
Đi u khi n thích nghi trong không gian bi n khớp
Các dạng mô hình hệ Euler-Lagrange
( ) ( , ) ( )
M q q C q q q g q u
( , ) ( , , ) ( , ) , ,
M q q C q q q g q u F q q q
( ) ( , ) ( ) ( )
M q q C q q q g q u t
( , ) ( , , ) ( , ) ( )
M q q C q q q g q u t
2
1
1
2 1 2 1
( ) ( ) ( )
x
x
x
x M x C x x g x u
trong đó và
1
x q
2
x q
1
( , , )T
n
q q q
1
( , , )T
n
w w w
25. 25
GS. Nguyễn Doãn Phước 25
Tính chất cơ bản c a hệ Euler-Lagrange
Đi u khi n thụ động (Áp dụng cho mô hình loại 1)
1. Là một hệ thụ động với hàm trữ năng trong đó là hàm
tổng động năng và là hàm tổng thế năng của hệ.
2. Có các điểm cân bằng với là nghiệm của
3. Ma trận là đối xứng xác định dương
4. Cặp ma trận thỏa mãn tính đối xứng lệch, tức là:
( )
M q
( ), ( , )
M q C q q
( ) ( , ) ( , )
T
M q C q q C q q
( ) 0
g q
( ,0)
e
col q e
q
Các tính chất trên luôn đúng ngay cả khi hệ có chứa tham số bất định
Bộ điều khiển: phản hồi đầu ra
với tùy chọn, trong đó hàm trữ năng:
cũng là hàm điều khiển Lyapunov.
( , )
r q q y
0
( , ) ( , ) ( )
S q q K q q P q
( , )
K q q
( )
P q
1
( , ) ( , ) ( ) ( ) ( )
2
T
S q q K q q P q q M q q P q
( )T
y M q q
Đi u khi n thích nghi trong không gian bi n khớp
26. 26
GS. Nguyễn Doãn Phước 26
Bộ đi u khi n PD bù trọng tr ờng (Áp dụng cho mô hình loại 1)
1 2
I
e
x x Ax
K K
e
A
Bộ điều khiển:
trong đó là hai ma trận đối xứng xác định dương tùy chọn và
Mô hình hệ kín:
1 2
( )( ) ( , ) ( )
u M q w K e K e C q q q g q
1 2
,
K K e w q
2 1 0
e K e K e
tức là có là ma trận Hurwitz
A
Bộ đi u khi n tuy n tính hóa chính xác thích nghi (Áp dụng cho mô hình loại 2)
q
u Hệ Euler-
Lagrange
Bộ đi u
khi n
Cơ cấu
chỉnh định
p
w
Bộ điều khiển:
Cơ cấu chỉnh định:
trong đó có tùy chọn
và
1 2
( , ) ( , , ) ( , )
u M q p w K e K e C q q p q g q p
T T T T
p E B Px E B Px
1
1 2
, , , ( , ) ( , , )
I
e
x A B M q p F q q q
K K
e I
0, 0
T T
E E Q Q
T
A P PA Q
Đi u khi n thích nghi trong không gian bi n khớp
27. 27
GS. Nguyễn Doãn Phước 27
Bộ điều khiển:
trong đó là hai ma trận đối xứng xác định dương tùy chọn và
Cơ cấu chỉnh định:
với cũng tùy chọn
Bộ đi u khi n thích nghi Li-Slotine (Áp dụng cho mô hình loại 2)
3
( , ) ( , , ) ( , ) ( )
u M q p v C q q p v g q p K v q
( ) ,
v w w q w e e w q
,
T T
p EF r EF e e r e e
3,
K
Đặc đi m:
1. Không cần xác định ma trận nghịch đảo của
2. Quá trình quá độ chia làm hai giai đoạn: Thứ nhất là khi đã đạt được
và thứ hai là khi kết thúc quá trình quá độ với
3. giai đoạn thứ 2 của quá trình quá độ, khi đã có song chưa có
nên bộ điều khiển vẫn phải thay đổi giá trị tín hiệu điều khiển để giữ cho
được . Điều này đã gián tiếp tạo ra hiện tượng rung
(chattering) trong hệ thống.
( , )
M q p
0
r
0
e
0
r 0
e
0
r e e
0
T
E E
Đi u khi n thích nghi trong không gian bi n khớp
28. 28
trong đó
Bộ điều khiển:
trong đó với và là vector hàm được chọn sao
cho thỏa mãn điều kiện bị chặn , sẽ đưa hệ sai số:
về được lân cận gốc tọa độ xác định bởi (gọi là miền hấp dẫn):
GS. Nguyễn Doãn Phước 28
Bộ đi u khi n b n vững ISS (Áp dụng cho mô hình loại 3)
1 2
e K e K e p
,
e
x e w q
e
2
2 1 0
i i
k k
2 2
1 2 1 2 1
max , , min ,
i i i i i
i
i
k k k k k
( ) ,
p t t
2n
x x
R
1 2
( ) ( ) ( , ) ( )
u M q w v t K e K e C q q q g q
1 1 2 2
( ), ( )
i i
K diag k K diag k
( )
v t
1
( ) ( ) ( )
p v t M q t
với
Trường hợp riêng: Để thu nhỏ miền hấp dẫn có thể chọn (*):
và
Khi đó sẽ có: . Suy ra , tức là được chọn càng lớn, kích thước
càng nhỏ và điều này không phụ thuộc
1 ( ), 1
K diag k k
2 ( ), 2
K diag ak a
a
k
lim 0
k
mas
k
( ).
v t
Đi u khi n thích nghi trong không gian bi n khớp
29. 29
Bộ điều khiển:
trong đó là hai ma trận đối xứng xác định dương tùy chọn,
và là tín hiệu bù sai lệch nhiễu, xác định bởi:
sẽ đưa được sai lệch bám về tới lân cận gốc (miền hấp dẫn):
có và là tùy chọn.
GS. Nguyễn Doãn Phước 29
Bộ đi u khi n thích nghi b n vững (Áp dụng cho mô hình loại 4)
1 1
1 2
( ) , ( )
T T
v E M F K M F K x
s Fv
Đây là phương pháp được xây dựng trên cơ sở kết hợp giữa hai phương pháp tuyến tính hóa
chính xác thích nghi để xử lý thành phần bất định và phương pháp ISS đế xử lý thành phần
nhiễu
( ).
t
1 2 ( )
u M w K e K e Cq g s t
( , ), ( , , ), ( , )
M M q p C C q q p g g q p
1 2
,
K K
( )
s t
( , ),
x col e e e w q
n
x x
R với 0 , sup ( ) , , T
t
Q t PB A P PA Q
0
T
Q Q
1 2
I
A
K K
với tùy chọn
p
Đi u khi n thích nghi trong không gian bi n khớp
30. GS. Nguyễn Doãn Phước 30
Tài liệu tham khảo
1. Phước,N.D: Tối ưu hóa trong điều khiển và điều khiển tối ưu. NXB Bách khoa (chuẩn bị xuất bản 2015).
2. Phước,N.D: Phân tích và điều khiển hệ phi tuyến. NXB Bách khoa, 2012.
3. Phước,N.D: Lý thuyết điều khiển nâng cao. NXB Khoa học và kỹ thuật, In lần thứ 3, 2009.
4. Phuoc,N.D. and Ha,L.T.T: Constrained output tracking control for time-varying bilinear systems via RHC
with infinite prediction horizon. Journal of Informatic and Cybernetic. Vietnam Academy of Science and
Technology, submited 2015.
5. Phước,N.D và Hà,L.T.T: Điều khiển bám thích nghi bền vững hệ phi tuyến có thành phần bất định hàm
không bị chặn. Tạp chí Khoa học và Công nghệ. Viện Hàn lâm Khoa học Việt Nam, số 53, tập 1, trang 9-
17, 2015.
6. Phước,N.D và Hà,L.T.T: Robust and adaptive tracking controller design for gearing transmission systems
by using its third oder model. Tạp chí KH&CN các trư ng Đại học kỹ thuật. Đại học Bách khoa Hà Nội.
Số 91, trang 12-17, 2012.
7. Phuoc,N.D.: Combining exact linearization and model reference techniques for design of adative global
asymptotic stabilizer to adaptive control of induction motor. Proceedings of EPE Conference 9.2005,
Germany. IEEE catalog number 05EX1132C. Vol.DS1-2, No. 251, trang P1-P8, 2005.