SYSTEM IDENTIFICATION USING CEREBELLAR MODEL ARITHMETIC COMPUTER

The field of identification is rather complex. This complexity is due to the variety of applications, goals, conditions, etc. Exact specifications of final aim to be attained, analysis of available precision, etc. are some of the basic requirements to guide the work. In this paper we used CMAC look up table for identification of both linear and non-linear systems. It deals with the basic CMAC architectures, its capability and shows the motivations why CMAC net can be used for system identification. CMAC network has hundreds of thousands of adjustable weights that can be trained to approximate non-linearities which are not explicitly written out or even known. Its associative memory has a built in generalization. We have shown that due to its extremely fast mapping and training operations, it is suitable for real time applications.
![Chandradeo Prasad and Tarun Kumar Gupta VSRDIJCSIT, Vol. IV (X) October 2014 / 174
activated (na = 5 in the example). The layer 1 neurons
effectively quantize the inputs.
Layer 2 contains nv association neurons aij which
are connected to one neuron from each layer 1 input
array (z1i, z2j ). Each layer 2 neuron outputs 1.0 when
all its inputs are nonzero, otherwise it outputs zero—
these neurons compute the logical AND of their inputs.
They are arranged so exactly na are activated by any
input (5 in the example).
Layer 3 contains the nx output neurons, each of
which computes a weighted sum of all layer 2
outputs, i.e.:
xi = ∑wijk ajk
The parameters wijk are the weights which
parameterize the CMAC mapping (wijk connects ajk
to output i). There are nx weights for every layer 2
association neuron, which makes nv nx weights in total.
Only a fraction of all the possible association neurons
are used. They are distributed in a pattern which
conserves weight parameters without degrading the
local generalization properties too much (this will be
explained later). Each layer 2 neuron has a receptive
field that is na × na units in size, i.e. this is the size of
the input space region that activates the neuron.
The CMAC was intended by Albus to be a simple model
of the cerebellum. Its three layers correspond to sensory
feature-detecting neurons, granule cells and Purkinje
cells respectively, the last two cell types being
dominant in the cortex of the cerebellum. This
similarity is rather superficial (as many biological
properties of the cerebellum are not modeled) therefore
it is not the main reason for using the CMAC in a
biologically based control approach. The CMAC’s
implementation speed is a far more useful property.
3. THE CMAC AS A LOOKUP TABLE
An alternative table based CMAC which is exactly
equivalent to the above neural network version. The
inputs y1 and y2 are first scaled and quantized to
integers q1 and q2. In this example:
q1 = 15 y1 … (1.1)
q2 = 15 y2 … (1.2)
as there are 15 inputs quantization steps between 0
and 1. The indexes (q1, q2) are used to look up
weights in na two-dimensional lookup tables (since
na = 5 is the number of association neurons activated
for any input). Each lookup table is called an
“association unit” (AU)—they may be labeled AU1. .
.AU5. The AU tables store one weight value in each
cell. Each AU has cells which are na times larger than
the input quantization cell size, and are also displaced
along each axis by some constant. The displacement
for AUi along input yj is di
. If pi is the table index for
AUi along axis yj then, in the example:
Pi
j = [(qj + di
j) / na] = [(qj +di
j)/(qj + di
j) / 5] … (1.3)
CMAC mapping algorithm (based on the table form)
follows in the next section. Software CMAC
implementations never use the neural network form.
The CMAC HASH function used by the CMAC
QUANTIZE AND ASSOCIATE procedure takes the AU
number and the table indexes and generates an index
into a weight array.
The CMAC is faster than an “equivalent” MLP
network because only na neurons (i.e. na table
entries) need to be considered to compute each output,
whereas the MLP must perform calculations for all of
its neurons.
4. THE CMAC ALGORITHM
Parameters
ny Number of inputs (integer≥ 1)
nx Number of outputs (integer≥ 1)
na Number of association units (integer≥ 1)
di j The displacement for AU i along input yj
(integer, 0 ≤ di j < na)
mini / Input ranges;
maxi the minimum and maximum values for yi (real).
resi Input resolution;
the number of quantization steps for input yi
(integer > 1).
nw The total number of physical CMAC weights per
output.
Internal state variables µi — An index into the
weight tables for association unit i (i = 1...na).
Wj[i] Weight i in the weight table for output xj,
i = 0...(nw −1), j = 1...nx.
∝ Increment
Quantization
Inputs: y1 ...yn y
Outputs: q1 ...qn x
for i ← 1...ny —for all inputs
if yi < mini then : yi ← mini limit yi
if yi > maxi then : yi ← maxi limit yi
qi ←⦋ resi (( yi -mini )/(maxi –mini)] +1 quantize input
if qi ≥ resi then : qi ← resi
Output Calculation
⇒for i ← 1...nx for all outputs
xi ← 0
for j ← 1...na
xi ← xi + Wij for all AUs add table entry to xi
Training
Inputs : t1 … tnx , ∝ (scalar)
Increment ← ∝ ((ti – xi)/na)
Wj[i] = Wj[i] + increment
Training Procedure: The training process takes a set
of desired input to output mappings (training points)
and adjusts the weights so that the global mapping fits
the set. It will be useful to distinguish between two
different CMAC training modes:
j](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recommended
More Related Content
What's hot
What's hot (20)
Similar to SYSTEM IDENTIFICATION USING CEREBELLAR MODEL ARITHMETIC COMPUTER
Similar to SYSTEM IDENTIFICATION USING CEREBELLAR MODEL ARITHMETIC COMPUTER (20)
Recently uploaded
Recently uploaded (20)
SYSTEM IDENTIFICATION USING CEREBELLAR MODEL ARITHMETIC COMPUTER
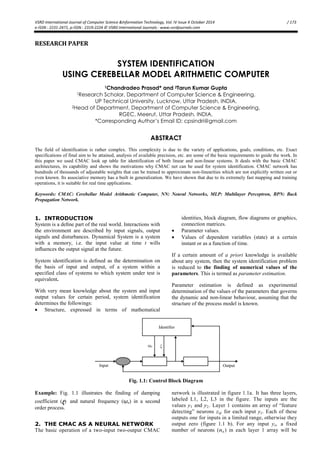
- 1. VSRD International Journal of Computer Science &Information Technology, Vol. IV Issue X October 2014 / 173 e-ISSN : 2231-2471, p-ISSN : 2319-2224 © VSRD International Journals : www.vsrdjournals.com RESEARCH PAPER SYSTEM IDENTIFICATION USING CEREBELLAR MODEL ARITHMETIC COMPUTER 1Chandradeo Prasad* and 2Tarun Kumar Gupta 1Research Scholar, Department of Computer Science & Engineering, UP Technical University, Lucknow, Uttar Pradesh, INDIA. 2Head of Department, Department of Computer Science & Engineering, RGEC, Meerut, Uttar Pradesh, INDIA. *Corresponding Author’s Email ID: cpsindri@gmail.com ABSTRACT The field of identification is rather complex. This complexity is due to the variety of applications, goals, conditions, etc. Exact specifications of final aim to be attained, analysis of available precision, etc. are some of the basic requirements to guide the work. In this paper we used CMAC look up table for identification of both linear and non-linear systems. It deals with the basic CMAC architectures, its capability and shows the motivations why CMAC net can be used for system identification. CMAC network has hundreds of thousands of adjustable weights that can be trained to approximate non-linearities which are not explicitly written out or even known. Its associative memory has a built in generalization. We have shown that due to its extremely fast mapping and training operations, it is suitable for real time applications. Keywords: CMAC: Cerebellar Model Arithmetic Computer, NN: Neural Networks, MLP: Multilayer Perceptron, BPN: Back Propagation Network. 1. INTRODUCTION System is a define part of the real world. Interactions with the environment are described by input signals, output signals and disturbances. Dynamical System is a system with a memory, i.e. the input value at time t wills influences the output signal at the future. System identification is defined as the determination on the basis of input and output, of a system within a specified class of systems to which system under test is equivalent. With very mean knowledge about the system and input output values for certain period, system identification determines the followings: Structure, expressed in terms of mathematical identities, block diagram, flow diagrams or graphics, connection matrices. Parameter values. Values of dependent variables (state) at a certain instant or as a function of time. If a certain amount of a priori knowledge is available about any system, then the system identification problem is reduced to the finding of numerical values of the parameters. This is termed as parameter estimation. Parameter estimation is defined as experimental determination of the values of the parameters that governs the dynamic and non-linear behaviour, assuming that the structure of the process model is known. Fig. 1.1: Control Block Diagram Example: Fig. 1.1 illustrates the finding of damping coefficient (ζ) and natural frequency (ῳn) in a second order process. 2. THE CMAC AS A NEURAL NETWORK The basic operation of a two-input two-output CMAC network is illustrated in figure 1.1a. It has three layers, labeled L1, L2, L3 in the figure. The inputs are the values y1 and y2. Layer 1 contains an array of “feature detecting” neurons zij for each input yi. Each of these outputs one for inputs in a limited range, otherwise they output zero (figure 1.1 b). For any input yi, a fixed number of neurons (na ) in each layer 1 array will be
- 2. Chandradeo Prasad and Tarun Kumar Gupta VSRDIJCSIT, Vol. IV (X) October 2014 / 174 activated (na = 5 in the example). The layer 1 neurons effectively quantize the inputs. Layer 2 contains nv association neurons aij which are connected to one neuron from each layer 1 input array (z1i, z2j ). Each layer 2 neuron outputs 1.0 when all its inputs are nonzero, otherwise it outputs zero— these neurons compute the logical AND of their inputs. They are arranged so exactly na are activated by any input (5 in the example). Layer 3 contains the nx output neurons, each of which computes a weighted sum of all layer 2 outputs, i.e.: xi = ∑wijk ajk The parameters wijk are the weights which parameterize the CMAC mapping (wijk connects ajk to output i). There are nx weights for every layer 2 association neuron, which makes nv nx weights in total. Only a fraction of all the possible association neurons are used. They are distributed in a pattern which conserves weight parameters without degrading the local generalization properties too much (this will be explained later). Each layer 2 neuron has a receptive field that is na × na units in size, i.e. this is the size of the input space region that activates the neuron. The CMAC was intended by Albus to be a simple model of the cerebellum. Its three layers correspond to sensory feature-detecting neurons, granule cells and Purkinje cells respectively, the last two cell types being dominant in the cortex of the cerebellum. This similarity is rather superficial (as many biological properties of the cerebellum are not modeled) therefore it is not the main reason for using the CMAC in a biologically based control approach. The CMAC’s implementation speed is a far more useful property. 3. THE CMAC AS A LOOKUP TABLE An alternative table based CMAC which is exactly equivalent to the above neural network version. The inputs y1 and y2 are first scaled and quantized to integers q1 and q2. In this example: q1 = 15 y1 … (1.1) q2 = 15 y2 … (1.2) as there are 15 inputs quantization steps between 0 and 1. The indexes (q1, q2) are used to look up weights in na two-dimensional lookup tables (since na = 5 is the number of association neurons activated for any input). Each lookup table is called an “association unit” (AU)—they may be labeled AU1. . .AU5. The AU tables store one weight value in each cell. Each AU has cells which are na times larger than the input quantization cell size, and are also displaced along each axis by some constant. The displacement for AUi along input yj is di . If pi is the table index for AUi along axis yj then, in the example: Pi j = [(qj + di j) / na] = [(qj +di j)/(qj + di j) / 5] … (1.3) CMAC mapping algorithm (based on the table form) follows in the next section. Software CMAC implementations never use the neural network form. The CMAC HASH function used by the CMAC QUANTIZE AND ASSOCIATE procedure takes the AU number and the table indexes and generates an index into a weight array. The CMAC is faster than an “equivalent” MLP network because only na neurons (i.e. na table entries) need to be considered to compute each output, whereas the MLP must perform calculations for all of its neurons. 4. THE CMAC ALGORITHM Parameters ny Number of inputs (integer≥ 1) nx Number of outputs (integer≥ 1) na Number of association units (integer≥ 1) di j The displacement for AU i along input yj (integer, 0 ≤ di j < na) mini / Input ranges; maxi the minimum and maximum values for yi (real). resi Input resolution; the number of quantization steps for input yi (integer > 1). nw The total number of physical CMAC weights per output. Internal state variables µi — An index into the weight tables for association unit i (i = 1...na). Wj[i] Weight i in the weight table for output xj, i = 0...(nw −1), j = 1...nx. ∝ Increment Quantization Inputs: y1 ...yn y Outputs: q1 ...qn x for i ← 1...ny —for all inputs if yi < mini then : yi ← mini limit yi if yi > maxi then : yi ← maxi limit yi qi ←⦋ resi (( yi -mini )/(maxi –mini)] +1 quantize input if qi ≥ resi then : qi ← resi Output Calculation ⇒for i ← 1...nx for all outputs xi ← 0 for j ← 1...na xi ← xi + Wij for all AUs add table entry to xi Training Inputs : t1 … tnx , ∝ (scalar) Increment ← ∝ ((ti – xi)/na) Wj[i] = Wj[i] + increment Training Procedure: The training process takes a set of desired input to output mappings (training points) and adjusts the weights so that the global mapping fits the set. It will be useful to distinguish between two different CMAC training modes: j
- 3. Chandradeo Prasad and Tarun Kumar Gupta VSRDIJCSIT, Vol. IV (X) October 2014 / 175 Target Training: First an input is presented to the CMAC and the output is computed. Then each of the na referenced weights (one per lookup table) is increased so that the outputs xi come closer to the desired target values ti , i.e.: wijk ← wijk + (ti - xi) … (1.5) where α is the learning rate constant (0 ≤ α ≤ 1). If α = 0 then the outputs will not change. If α = 1 then the outputs will be set equal to the targets. This is implemented in the CMAC TARGET-TRAIN procedure. Error Training: First an input is presented to the CMAC and the output is computed. Then each of the na referenced weights is incremented so that the output vector [x1 . . . xnx ] increases in the direction of the error vector [e1 . . . enx ], i.e.: wijk ← wijk + ei ... (1.6) This results in a trivial change to the CMAC TARGETTRAIN procedure. Target training causes the CMAC output to seek a given target, error. Training causes it to grow in a given direction. The input/desired-output pairs (training points) are normally presented to the CMAC in one of two ways: Random Order: If the CMAC is to be trained to represent some function that is known beforehand, then a selection of training points from the function can be presented in random order to minimize learning interference. Trajectory Order: If the CMAC is being used in an online controller then the training point inputs will probably vary gradually, as they are tied to the system sensors. In this case each training point will be close to the previous one in the input space. Comparison with the MLP: To represent a given set of training data the CMAC normally requires more parameters than an MLP. The CMAC is often over- parameterized for the training data, so the MLP has a smoother representation which ignores noise and corresponds better to the data’s underlying structure. The number of CMAC weights required to represent a given training set is proportional to the volume spanned by that data in the input space. The CMAC can be more easily trained on-line than the MLP, for two reasons. First, the training iterations are fast. Second, the rate of convergence to the training data can be made as high as required, up to the instant convergence of α = 1 (although such high learning rates are never used because of training interference and noise problems). The MLP always requires much iteration to converge, regardless of its learning rate. 5. EXPERIMENTAL RESULTS The CMAC network programs developed in MATLAB. These programs were employed to test a single pendulum system. This system has a driving force and viscous damping force. This system is defined by the following equation: Θ`` + 2ζθ + sinθ = f(t) Where θ(t) is the angular displacement of pendulum f(t) is the driving force of the system ζ is the damping coefficient This neural network identification block took the present driving force value and present values of θ` and θ`` (angular displacement and angular velocity). These are state variables of the system as inputs and give the estimate of the present value of the damping coefficients. The network was trained with learning rates of 0.2, 0.3 and 0.4. The network was also tested with different number of data points. The results of network with learning rate of 0.2 and 126 number of data points is listed in table number 1.1. The result of the randomly chosen 65 data points for a learning rate of 0.2 from the above given data is listed in table number 1.2. Fig. 1.1: An example two-input two-output CMAC, in Neural Network Form (ny = 2, na = 5, nv = 72, nx = 2)
- 4. Chandradeo Prasad and Tarun Kumar Gupta VSRDIJCSIT, Vol. IV (X) October 2014 / 176 Table 1.1: Results of Testing with Number of Data Points Θ’ Θ” f(t) ζ 0 1.0000 1.5000 0 0.0500 0.9988 1.5000 0.0500 0.0998 0.9950 1.5000 0.1000 0.1494 0.9888 1.5000 0.1500 0.1987 0.9801 1.5000 0.2000 0.2474 0.9689 1.5000 0.2500 0.2955 0.9553 1.5000 0.3000 0.3429 0.9394 1.5000 0.3500 0.3894 0.9211 1.5000 0.4000 0.4350 0.9004 1.5000 0.4500 0.4794 0.8776 1.5000 0.5000 0.5227 0.8525 1.5000 0.5500 0.5646 0.8253 1.5000 0.6000 0.6052 0.7961 1.5000 0.6500 0.6442 0.7648 1.5000 0.7000 0.6816 0.7317 1.5000 0.7500 0.7174 0.6967 1.5000 0.8000 0.7513 0.6600 1.5000 0.8500 0.7833 0.6216 1.5000 0.9000 0.8134 0.5817 1.5000 0.9500 0.8415 0.5403 1.5000 1.0000 0.8674 0.4976 1.5000 1.0500 0.8912 0.4536 1.5000 1.1000 0.9128 0.4085 1.5000 1.1500 0.9320 0.3624 1.5000 1.2000 0.9490 0.3153 1.5000 1.2500 0.9636 0.2675 1.5000 1.3000 0.9757 0.2190 1.5000 1.3500 0.9854 0.1700 1.5000 1.4000 0.9927 0.1205 1.5000 1.4500 0.9975 0.0707 1.5000 1.5000 0.9998 0.0208 1.5000 1.5500 0.9996 -0.0292 1.5000 1.6000 0.9969 -0.0791 1.5000 1.6500 0.9917 -0.1288 1.5000 1.7000 0.9840 -0.1782 1.5000 1.7500 0.9738 -0.2272 1.5000 1.8000 0.9613 -0.2756 1.5000 1.8500 0.9463 -0.3233 1.5000 1.9000 0.9290 -0.3702 1.5000 1.9500 0.9093 -0.4161 1.5000 2.0000 0.9093 -0.4161 -2.0000 2.0000 0.8874 -0.4611 -2.0000 1.9000 0.8632 -0.5048 -2.0000 1.8000 0.8369 -0.5474 -2.0000 1.7000 0.8085 -0.5885 -2.0000 1.6000 0.7781 -0.6282 -2.0000 1.5000 0.7457 -0.6663 -2.0000 1.4000 0.7115 -0.7027 -2.0000 1.3000 0.6755 -0.7374 -2.0000 1.2000 0.6378 -0.7702 -2.0000 1.1000 0.5985 -0.8011 -2.0000 1.0000 0.5577 -0.8301 -2.0000 0.9000 0.5155 -0.8569 -2.0000 0.8000
- 5. Chandradeo Prasad and Tarun Kumar Gupta VSRDIJCSIT, Vol. IV (X) October 2014 / 177 Table 1.2: Test Results Target Values Calculated Outputs 0.0000 0.0000 0.1000 0.1000 0.2000 0.2000 0.3000 0.3000 0.4000 0.4000 0.5000 0.5000 0.6000 0.6000 0.7000 0.7000 0.8000 0.8000 0.9000 0.9000 1.0000 1.0000 1.1000 1.1000 1.2000 1.2000 1.3000 1.3000 1.4000 1.4000 1.5000 1.5000 1.6000 1.6000 1.7000 1.7000 1.8000 1.8000 1.9000 1.9000 2.0000 2.0000 2.1000 2.1000 2.2000 2.2000 2.3000 2.3000 0.4000 0.4000 1.5000 1.5000 0.6000 0.6000 1.7000 1.7000 1.8000 1.8000 0.9000 0.9000 1.0000 1.0000 0.8000 0.8000 0 0 -0.2000 -0.2000 -0.5000 -0.5000 -0.6000 -0.6000 -0.8000 -0.8000 -1.2000 -1.2000 -1.4000 -1.4000 -1.6000 -1.6000 -1.8000 -1.8000 -2.4000 -2.4000 -2.2000 -2.2000 -0.0653 -0.0653 -1.0059 -1.0059 -2.6000 -2.6000 -2.0623 -2.0623 -1.0123 -1.0123 -1.0256 -1.0256
- 6. Chandradeo Prasad and Tarun Kumar Gupta VSRDIJCSIT, Vol. IV (X) October 2014 / 178 Fig. 1.2: Variance Plot of Omega Fig. 1.3: Variance Plot of Actuation Signal Fig. 1.4: Time Variance Plot of Output Variable
- 7. Chandradeo Prasad and Tarun Kumar Gupta VSRDIJCSIT, Vol. IV (X) October 2014 / 179 6. CONCLUSION The implementation of CMAC in system identification has been compared with that of other conventional method and other neural network implementations. The self-tuning regulator method calls for large system inputs and yet cannot track the system when the plant is non- linear. The ML, BPN approaches are capable of tracking non-linear systems too but take long time to learn the system. The mapping and training operations of CMAC is extremely fast. Here estimates are generated virtually from a table look up procedure. It performs well with both linear and non-linear systems as well. It has been found to be easier to implement and seems to be most suitable for real time applications. 7. FUTURE SCOPE Hardware Implementation: Hardware implementation of CMAC requires large amount of memory. Once it is achieved, it can be used in missile delivery/defence systems giving a clear and efficient edge over rivals because of its extremely fast mapping. CMAC can also be experimented to be efficiently used in higher order and unstable systems. 8. REFERENCES [1] L. Ljung, System Identification - Theory for the User. Prentice-Hall, N.J. 2nd edition, 1999. [2] J. Schoukens and R. Pintelon, System Identification. A Frequency Domain Approach, IEEE Press, New York, 2001. [3] T. Söderström and P. Stoica, System Indentification, Prentice Hall, Enhlewood Cliffs, NJ. 1989. [4] P. Eykhoff, System Identification, Parameter and State Estimation, Wiley, New York, 1974. [5] A. P. Sage and J. L. Melsa, Estimation Theory with Application to Communications and Control, McGraw- Hill, New York, 1971. [6] H. L. Van Trees, Detection Estimation and Modulation Theory, Part I. Wiley, New York, 1968. [7] G. C. Goodwin and R. L. Payne, Dynamic System Identification, Academic Press, New York, 1977. [8] K. Hornik, M. Stinchcombe and H. White, Multilayer Feed-forward Networks are Universal Approximators", Neural Networks Vol. 2. 1989. pp. 359-366. [9] G. Cybenko, Approximation by Superposition of Sigmoidal Functions, Mathematical Control Signals Systems, Vol. 2. pp. 303-314, 1989. [10] K. I. Funahashi, On the Approximate Realization of Continuous Mappings by Neural Networks", Neural Networks, Vol. 2. No. 3. pp. 1989. 183-192. [11] M. Leshno, V. Y. Lin, A. Pinkus and S. Schocken, Multilayer Feed-forward Networks With a Nonpolynomial Activation Function Can Approximate Any Function, Neural Networks, Vol. 6. 1993. pp. 861-67 [12] J. S. Albus, A New Approach to Manipulator Control: The Cerebellar Model Articulation Controller (CMAC), Transaction of the ASME, Sep. 1975. pp. 220-227. [13] Y. H. Pao, Adaptive Pattern Recognition and Neural Networks, Addison-Wesley, Reading, Mass., 1989, pp. 197-222. [14] D. F. Specht, Polynomial Neural Networks, Neural Networks, Vol.3. No. 1 pp. 1990. pp. 109-118, [15] J. Park and I. W. Sandberg, Approximation and Radial- Basis-Function Networks, Neural Computation, Vol 5. No. 2.
- 8. Chandradeo Prasad and Tarun Kumar Gupta VSRDIJCSIT, Vol. IV (X) October 2014 / 180