EGME 431 Term Project
Jake Bailey, CSU Fullerton
Spring 2016
This document serves to set forth the requirements for your term project, and the criteria
which such project submissions shall be judged. This outline should be the first point of inquiry
for any questions you may have about your project.
The project consists of a thorough investigation, analysis, and set of design improvement sug-
gestions for a simplified automobile suspension model. The dynamics of this model are rather
complex: as such, I have provided a detailed derivation of the equations of motion for this system
to you in a separate document. Your responsibility will be that of the analyst: use the provided dy-
namic models to investigate the system’s response to typical inputs, judge these responses critically,
and suggest improvements to the system.
Your project submissions shall consist of a single analysis and design report. The project
report shall be turned in no later than the final class meeting of the semester, which is May 10,
2016 at 7:00 PM. As always, late assignments will not be accepted. The report shall, at a minimum,
include:
• A description of your analysis methodology
• A summary of the important results from your analyses, including plots and data tables where
appropriate
• A thorough defense of your analysis results, including (but not limited to):
– comparison with analytical approximations
– investigation of typical results of published investigations, and
– discussion and investigation of the approximate errors accrued in your simulations
• A succinct description of the modifications you propose to improve the performance of the
system, including justification of your choices
The dynamic models which have been provided to you include both a fully coupled, non-linear
model and a simplified, linearized version. It is up to you to decide which to use for each portion
of the tasks outlined below. Note, however, that you should, at a minimum, simulate both models
under a common input. This will server as a basis for comparison.
Your specific tasks for this project are as follows:
1. Find the response of the system to a variety of inputs, including steps, impulses, and harmonic
excitation.
2. Determine the Displacement Transmissibility Ratio and Force Transmissibility Ratio of the
system over a range of input frequencies.
1
3. Using judgment, analytical techniques, and/or optimization methods, find a new set of sys-
tem parameters (stiffnesses and damping coefficients) which will improve the response of the
system to the selected inputs.
4. Finally, prepare a report which thoroughly summarizes and defends your methodology and
results.
A final word on collaboration. You are encouraged to discuss your ideas and your solution
approach with your classmates and colleagues. You are, however, expressly forbidden from sharing
simulation data, code, spreadsheets, scripts, or the like with anyone. Two students submitting
substantially similar s ...
EGME 431 Term ProjectJake Bailey, CSU FullertonSpring .docx
1. EGME 431 Term Project
Jake Bailey, CSU Fullerton
Spring 2016
This document serves to set forth the requirements for your
term project, and the criteria
which such project submissions shall be judged. This outline
should be the first point of inquiry
for any questions you may have about your project.
The project consists of a thorough investigation, analysis, and
set of design improvement sug-
gestions for a simplified automobile suspension model. The
dynamics of this model are rather
complex: as such, I have provided a detailed derivation of the
equations of motion for this system
to you in a separate document. Your responsibility will be that
of the analyst: use the provided dy-
namic models to investigate the system’s response to typical
inputs, judge these responses critically,
and suggest improvements to the system.
Your project submissions shall consist of a single analysis and
design report. The project
report shall be turned in no later than the final class meeting of
the semester, which is May 10,
2016 at 7:00 PM. As always, late assignments will not be
accepted. The report shall, at a minimum,
include:
2. • A description of your analysis methodology
• A summary of the important results from your analyses,
including plots and data tables where
appropriate
• A thorough defense of your analysis results, including (but not
limited to):
– comparison with analytical approximations
– investigation of typical results of published investigations,
and
– discussion and investigation of the approximate errors accrued
in your simulations
• A succinct description of the modifications you propose to
improve the performance of the
system, including justification of your choices
The dynamic models which have been provided to you include
both a fully coupled, non-linear
model and a simplified, linearized version. It is up to you to
decide which to use for each portion
of the tasks outlined below. Note, however, that you should, at a
minimum, simulate both models
under a common input. This will server as a basis for
comparison.
Your specific tasks for this project are as follows:
1. Find the response of the system to a variety of inputs,
including steps, impulses, and harmonic
excitation.
3. 2. Determine the Displacement Transmissibility Ratio and Force
Transmissibility Ratio of the
system over a range of input frequencies.
1
3. Using judgment, analytical techniques, and/or optimization
methods, find a new set of sys-
tem parameters (stiffnesses and damping coefficients) which
will improve the response of the
system to the selected inputs.
4. Finally, prepare a report which thoroughly summarizes and
defends your methodology and
results.
A final word on collaboration. You are encouraged to discuss
your ideas and your solution
approach with your classmates and colleagues. You are,
however, expressly forbidden from sharing
simulation data, code, spreadsheets, scripts, or the like with
anyone. Two students submitting
substantially similar simulation code or spreadsheets will be
considered cheaters, and reprimanded
as such. As always, your reports are to be wholly your own
creations, and the standard plagiarism
rules apply.
2
Dynamic Model of an Automobile Suspension
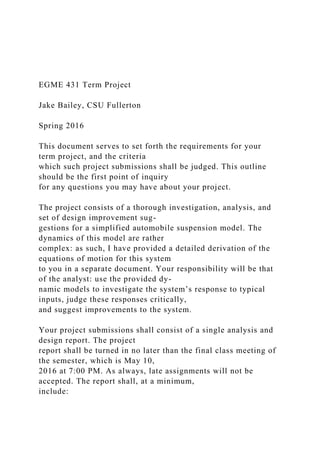
5. model includes one half of a complete vehicle, with half a
chassis suspended upon two individual
wheels. Figure 1 shows this graphically.
Figure 1: A simplified dynamic model of half of a car’s
suspension, including tire stiffness and viscoelastic
damping. For our purposes, we shall ignore the effects of the
tires and treat them as rigid bodies.
As can be seen in the figure, we have two spring stiffnesses and
two damping coefficients to deal
with, along with the two ”unsprung” masses and the mass of the
vehicle. These are the parameters
on which we shall base the dynamic model of the vehicle.
1
Before we begin modeling, we shall make a few assumptions
about the performance of the
system.
• Both wheels maintain contact with the ground throughout the
time period of interest
• Motion of the vehicle is constrained to the plane (i.e. there are
only 3 degrees of freedom)
• Neither wheel is allowed to slip along the ground as the
vehicle moves in the x direction
2 Modeling
2.1 Total System Energy
6. 2.1.1 Potential Energy
To use the Lagrangian approach to arrive at our equations of
motion, we must first define the
Lagrangian. As you’ll recall, the Lagrangian for systems with
conservative potential energies can
be written as
L = T − U
where T represents the total kinetic energy in the system in
terms of the generalized coordinates,
and U represents the total potential energy. We will first
concern ourselves with the potential
energy of the system. By examination of the system, we see that
there are only three sources of
potential energy in the model:
1. Energy stored via compression of the front spring
2. Energy stored via compression of the rear spring
3. Gravitational potential energy due to the height of the
chassis’ mass
You’ll notice that we ignore the potential energy due to the
height of the “unsprung” masses
of the wheels, due to our assumption of constant contact with
the ground. While there may be
some potential energy stored by these masses, it will ultimately
be included in our analysis of the
base excitation of the system, which is due to the unevenness of
the ground.
Items 1 and 2 of the potential energy can be expressed in
similar form:
7. U1 =
1
2
kfy
2
f
U2 =
1
2
kry
2
r
The third term in the total energy is simply the familiar
gravitational potential energy,
U3 =
Mg(yf + yr)
2
,
where we take the height of the chassis’ mass as the average of
the front and rear suspension heights.
Finally, we can write the total potential energy of the system,
Utotal, as
Utotal = U1 + U2 + U3
Utotal =
8. 1
2
kfy
2
f +
1
2
kry
2
r +
Mg(yf + yr)
2
(1)
2
2.1.2 Kinetic Energy
Moving on to the kinetic energy, we will see that again we have
three possible sources of kinetic
energy, although their equations are slightly more complicated.
These sources are
1. Kinetic energy of the front wheel
2. Kinetic energy of the rear wheel
9. 3. Kinetic energy of the chassis mass
Since we are considering full plane motion, we will have energy
terms for these three masses in all
three coordinates x, yf, and yr. However, a few of these will
simplify out.
We can write the total kinetic energy of the front wheel as
Tf =
1
2
mfẋ
2 +
1
2
mf ẏ
2
f +
1
2
mf ẏ
2
r
However, we know that, by definition in our model, the front
wheel has no motion due to yr, and
thus the third term in equation X is zero. Thus, the front
wheel’s kinetic energy simplifies to
10. Tf =
1
2
mfẋ
2 +
1
2
mf ẏ
2
f
Similarly, for the rear wheel,
Tr =
1
2
mrẋ
2 +
1
2
mrẏ
2
r
Next, we turn our attention to the chassis mass of the vehicle.
While we could find the kinetic
energies of the body due to our current coordinates, it is slightly
11. more intuitive to employ a trans-
formation of coordinates into a more natural set for the chassis.
We note that our coordinates of
interest for this simulation are the pitch and bounce of the
vehicle, as discussed in the introduction.
Further, we note that these two can easily be obtained from our
current coordinates via the simple
transformations
ybounce =
(yf + yr)
2
Θ = sin−1(
yr − yf
L
)
The final coordinate for the chassis mass, x, remains
unchanged. We will also need the velocities
of these transformed coordinates, which you can verify are as
shown below.
ẏbounce =
(ẏf + ẏr)
2
Θ̇ =
(ẏr − ẏf )
L
√
12. 1 − ( (yr−yf )
L
)2
With the coordinate transformation in hand, all that remains is
to write the kinetic energies
of the chassis mass in the typical fashion,
TM =
1
2
Mẋ2 +
1
2
Mẏ2bounce +
1
2
JM Θ̇
2
3
noting that JM represents the mass moment of inertia of the
chassis. Substituting our coordinate
transformations for the output coordinates, we obtain the final
kinetic energy for the chassis mass.
13. TM =
1
2
Mẋ2 +
1
2
M
(ẏf + ẏr)
4
2
+
1
2
JM
ẏ2r − 2ẏrẏf + ẏ2f
(L2 + 2yfyr − y2f − y2r )
We combine the kinetic energies of the three bodies to arrive at
the system’s total kinetic
energy.
Ttotal =
1
2
mfẋ
15. 2
+
1
2
JM
ẏ2r − 2ẏrẏf + ẏ2f
(L2 + 2yfyr − y2f − y2r )
(2)
2.1.3 Dissipative Terms
With the system’s kinetic and potential energies in hand, we
now turn our attention to the energy
dissipation due to the front and rear dampers. As you’ll recall
from our readings, we can construct
a Rayleigh dissipation function, R, that includes the effects of
all the dampers in the system, and
include it in our Lagrangian model as a part of the general
forces applied to the system. Recall
that for low velocity, viscous damping, R takes the form
R = −
1
2
n∑
i=1
n∑
j=1
16. cijq̇ iq̇ j
Since we only have two dampers, our dissipation function is
relatively simple:
R = −
1
2
cf ẏ
2
f −
1
2
crẏ
2
r
Recalling that the generalized force due to the Rayleigh
dissipation function is
Fi =
∂R
∂q̇ i
We find that the forces due to our dampers are simply the
familiar linear terms in the respective
velocities.
Ff = −
17. 1
2
cf ẏ
2
f
Fr = −
1
2
crẏ
2
r
2.2 Lagrangian and the Equations of Motion
We now have the requisite material at hand to produce the
Lagrangian of the system, and thus
the equations of motion for the entire system. As noted in the
previous section, the Lagrangian is
simply L = T − U. Bringing together our complete terms for the
potential and kinetic energies of
the system, we arrive at the system’s Lagrangian:
L = Ttotal − Utotal
4
(3)
L =
20. 2
)
We can simplify this expression for the Lagrangian significantly
by combining like terms, and
introducing a few new ones. First, we can see that the term (L2
+2yfyr −y2f −y
2
r ) appears frequently
in the Lagrangian. For convenience, we rename this term as Le,
a sort of effective length between the
wheels. Since we will have need of it shortly in deriving the
equations of motion, we also find that
the time rate of change of the effective length can be written as
L
̇ e = 2 (yrẏf + ẏryf )−2yrẏr−2yf ẏf .
Substituting this new length and gathering like terms, we arrive
at the simplified Lagrangian:
(4)
L =
(M + mf + mr)
2
ẋ2 + (
M
8
+
JM
2Le
22. 1
2
kry
2
r −
Mg(yf + yr)
2
Next, we begin to derive the equations of motion from the
Lagrangian. Starting with the
equation of motion for the x coordinate, we take the appropriate
partial derivatives as
d
dt
∂L
∂ẋ
−
∂L
∂x
=
∑
Fx
∂L
23. ∂ẋ
= (M + mf + mr)ẋ
d
dt
∂L
∂ẋ
= (M + mf + mr)ẍ
∂L
∂x
= 0
and arrive at the simplified equation of motion:
(5)(M + mf + mr)ẍ =
∑
Fx
This unsurprising result tells us simply that the acceleration of
the total mass of the vehicle,
and thus the vehicle itself, depends solely on the forces applied
in the direction of the x coordinate.
The equation of motion in the yf and yr coordinates are a bit
more involved, as we shall see.
Again taking the appropriate partial derivatives,
∂L
25. JM
Le
+ mf )ÿf + (
M
4
−
JM
Le
)ÿr − JM
L
̇ e(ẏr − ẏf )
L2e
Noting here that the third term in this derivative appears due to
the time variant nature of our
effective length, Le.
Continuing our work with partial differentiation, we move on to
those with respect to yf
∂L
∂yf
= −kfyf −
Mgyr
2
5
26. Before completing the equation of motion, we recall that our
forces due to damping were included
as part of the generalized force acting in each of the coordinate
directions. Thus, we may write the
generalized force in the yf direction as a sum of the known
damping force and any external forces
as such: ∑
Fyf =
∑
Fexternal − cf ẏf
Now, we may write the full equation of motion for the yf
direction.
d
dt
∂L
∂ẏf
−
∂L
∂yf
=
∑
Fyf
(7)
(
M
27. 4
+
JM
Le
+ mf )ÿf + (
M
4
−
JM
Le
)ÿr
− JM
L
̇ e(ẏr − ẏf )
L2e
− (−kfyf −
Mgyr
2
) =
∑
Fexternal − cf ẏf
Which, after a bit of rearrangement, gives us our final (non-
linear) form of the equation of
motion in the yf direction.
28. (8)
(
M
4
+
JM
Le
+ mf )ÿf + (
M
4
−
JM
Le
)ÿr
− JM
L
̇ e(ẏr − ẏf )
L2e
+ cf ẏf + kfyf +
Mgyr
2
=
∑
Ffexternal
By a nearly identical set of arguments, we may find the
29. equation of motion for the yr direction.
Since it would be highly repetitive to demonstrate the derivation
of said equation, we will not labor
it here. We will, however, call your attention to the fact that the
cross-coupled term in the velocities
(i.e. that term involving the time derivative of the effective
length, L̇ e) has had its sign switched
in the yr equation.
(9)
(
M
4
+
JM
Le
+ mr)ÿr + (
M
4
−
JM
Le
)ÿf
+ JM
L
̇ e(ẏr − ẏf )
L2e
+ crẏr + kryr +
30. Mgyf
2
=
∑
Frexternal
Thus, we note that equations 5, 8, and 9 represent a complete
set of equations of motion for
our three degree of freedom model of an automobile suspension.
The astute reader will notice
that these equations are both highly coupled, and non-linear.
While non-linear equations such as
these pose little trouble to solution via modern numerical
methods, they do pose a problem to us
mere mortals in that we cannot use any of the methods we have
developed for investigating and
interrogating linear, multiple degree of freedom systems.
2.3 Linearizing a Nonlinear Model
To aid us in our system inspection, design, and selection of
parameters for functional improvements,
we shall linearize the previous equations of motion about a
chosen operating point. There are
many methods which would allow such a linearization, such as
the Jacobian technique. However,
the nature of our problem allows a much simpler method to be
employed by adding an extra
assumption to our initial set.
6
31. 2.3.1 Small Angles
By restricting our attention to the performance of the system
within a small range about the
“origin,” or our equilibrium point, we can further simplify our
model. First we note that our
equilibrium point is specified completely as
x = 0,
ybounce = 0,
Θ = 0.
By restricting our attention to small angles about this
equilibrium point, we can take advantage of
the fact that at small angles,
sinΘ ≈ Θ.
Substituting this into our coordinate transform equation, we
arrive at the following result:
Θ =
(yr − yf )
L
,
Θ̇ =
(ẏr − ẏf )
L
,
Θ̇2 =
32. (ẏ2r − 2ẏrẏf + ẏ2f )
L2
This leads us to the result of an effective length, Le, which has
a constant value of L
2. Most
importantly, we see that L̇ e = 0, which shall simplify our model
significantly. Substituting these
results into our previous equations of motion lets us write:
(10)(M + mf + mr)ẍ =
∑
Fx,
(11)
(
M
4
+
JM
L2
+ mf )ÿf + (
M
4
−
JM
L2
33. )ÿr
+ cf ẏf + kfyf +
Mgyr
2
=
∑
Ffexternal,
(12)
(
M
4
+
JM
L2
+ mr)ÿr + (
M
4
−
JM
L2
)ÿf
+ crẏr + kryr +
Mgyf
2
34. =
∑
Frexternal,
which we can see are a set of three linear, coupled differential
equations.
3 Conclusion
This linear set of equations can be used to interrogate the basic
properties of our system, such as
eigenvalues (natural frequencies), eigenvectors (mode shapes),
and stability. The linearized equa-
tions can also be used for lightweight simulation. In particular,
MATLAB and Simulink offer very
straightforward procedures for time domain simulation of
systems represented in state space form,
which is an excellent place to start as you work toward the
design goals of your project. Note,
however, that the full nonlinear model developed in the
previous section will still be necessary as
you look to validate your design results on that model.
7