The document discusses the integration of GMSL (Gigabit Multimedia Serial Link) in the Linux environment, specifically for automotive applications such as ADAS (Advanced Driver Assistance Systems). It covers technical details of GMSL serializers and deserializers, data transmission characteristics, and specific use cases, alongside the R-Car Gen3 platform's support for CSI-2 camera inputs. Additionally, challenges encountered during implementation and future development directions are highlighted.












![● [RFC PATCH v1 0/4] GMSL Drivers
– https://lwn.net/ml/linux-media/20180605233435.18102-1-kieran.bingham+renesas@ideasonboard.com/
– ` [RFC PATCH v1 1/4] media: dt-bindings: max9286: add device tree binding Kieran Bingham
– ` [RFC PATCH v1 2/4] media: i2c: Add MAX9286 driver Kieran Bingham
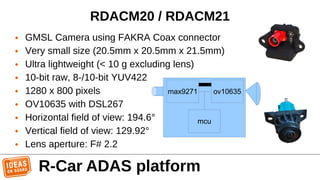
– ` [RFC PATCH v1 3/4] media: dt-bindings: rdacm20: add device tree binding Kieran Bingham
– ` [RFC PATCH v1 4/4] media: i2c: Add RDACM20 driver Kieran Bingham
● [RFC 0/2] GMSL bindings description update
– https://lwn.net/ml/linux-media/1528543805-23945-1-git-send-email-jacopo%2Brenesas%40jmondi.org/
` [RFC 1/2] dt/bindings: media: Add DT bindings for Maxim Integrated MAX9286 Jacopo Mondi
` [RFC 2/2] dt-bindings: media: i2c: Add bindings for IMI RDACM20 Jacopo Mondi
Upstreaming](https://image.slidesharecdn.com/gmslinlinux-180623064625/85/GMSL-in-Linux-21-320.jpg)

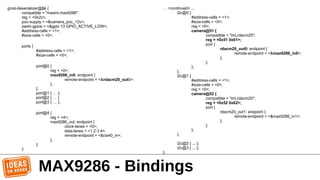
![Required Properties:
- compatible: Shall be "maxim,max9286"
- reg: I2C device address
Optional Properties:
- poc-supply: Regulator providing Power over Coax to the
cameras
- pwdn-gpios: GPIO connected to the #PWDN pin
Required endpoint nodes:
----------------------------------
The connections to the MAX9286 GMSL and its endpoint
nodes are modeled using the OF graph bindings in
accordance with the video interface bindings defined in
Documentation/devicetree/bindings/media/video-
interfaces.txt.
The following table lists the port number corresponding to
each device port.
Port Description
----------------------------------------
Port 0 GMSL Input 0
Port 1 GMSL Input 1
Port 2 GMSL Input 2
Port 3 GMSL Input 3
Port 4 CSI-2 Output
MAX9286 - Bindings
Optional Endpoint Properties for GSML Input Ports (Port [0-3]):
- remote-endpoint: phandle to the remote GMSL source
endpoint subnode in the remote node port.
Required Endpoint Properties for CSI-2 Output Port (Port 4):
- data-lanes: array of physical CSI-2 data lane indexes.
- clock-lanes: index of CSI-2 clock lane.
Required i2c-mux nodes:
----------------------------------
Each remote GMSL endpoint is modeled as child busses of an
i2c bus multiplexer/switch, in accordance with bindings
described in Documentation/devicetree/bindings/i2c/i2c-mux.txt.
Required i2c child bus properties:
- all properties described as required i2c child bus nodes
properties in Documentation/devicetree/bindings/i2c/i2c-mux.txt.](https://image.slidesharecdn.com/gmslinlinux-180623064625/85/GMSL-in-Linux-23-320.jpg)