

Recommended
More Related Content
What's hot
What's hot (20)
Similar to Lecture 8 - Splines
Similar to Lecture 8 - Splines (20)
Recently uploaded
Recently uploaded (20)
Lecture 8 - Splines
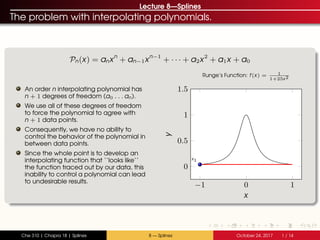
- 1. Lecture 8—Splines The problem with interpolating polynomials. Pn(x) = anxn + an−1xn−1 + · · · + a2x2 + a1x + a0 An order n interpolating polynomial has n + 1 degrees of freedom (a0 . . . an). We use all of these degrees of freedom to force the polynomial to agree with n + 1 data points. Consequently, we have no ability to control the behavior of the polynomial in between data points. Since the whole point is to develop an interpolating function that ‘‘looks like’’ the function traced out by our data, this inability to control a polynomial can lead to undesirable results. −1 0 1 0 0.5 1 1.5 x1 x y Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 1 / 14
- 2. Lecture 8—Splines The problem with interpolating polynomials. Pn(x) = anxn + an−1xn−1 + · · · + a2x2 + a1x + a0 An order n interpolating polynomial has n + 1 degrees of freedom (a0 . . . an). We use all of these degrees of freedom to force the polynomial to agree with n + 1 data points. Consequently, we have no ability to control the behavior of the polynomial in between data points. Since the whole point is to develop an interpolating function that ‘‘looks like’’ the function traced out by our data, this inability to control a polynomial can lead to undesirable results. −1 0 1 0 0.5 1 1.5 x1 x2 x y Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 1 / 14
- 3. Lecture 8—Splines The problem with interpolating polynomials. Pn(x) = anxn + an−1xn−1 + · · · + a2x2 + a1x + a0 An order n interpolating polynomial has n + 1 degrees of freedom (a0 . . . an). We use all of these degrees of freedom to force the polynomial to agree with n + 1 data points. Consequently, we have no ability to control the behavior of the polynomial in between data points. Since the whole point is to develop an interpolating function that ‘‘looks like’’ the function traced out by our data, this inability to control a polynomial can lead to undesirable results. −1 0 1 0 0.5 1 1.5 x1 x2 x3 x y Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 1 / 14
- 4. Lecture 8—Splines The problem with interpolating polynomials. Pn(x) = anxn + an−1xn−1 + · · · + a2x2 + a1x + a0 An order n interpolating polynomial has n + 1 degrees of freedom (a0 . . . an). We use all of these degrees of freedom to force the polynomial to agree with n + 1 data points. Consequently, we have no ability to control the behavior of the polynomial in between data points. Since the whole point is to develop an interpolating function that ‘‘looks like’’ the function traced out by our data, this inability to control a polynomial can lead to undesirable results. −1 0 1 0 0.5 1 1.5 x1 x2 x3 x4 x y Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 1 / 14
- 5. Lecture 8—Splines The problem with interpolating polynomials. Pn(x) = anxn + an−1xn−1 + · · · + a2x2 + a1x + a0 An order n interpolating polynomial has n + 1 degrees of freedom (a0 . . . an). We use all of these degrees of freedom to force the polynomial to agree with n + 1 data points. Consequently, we have no ability to control the behavior of the polynomial in between data points. Since the whole point is to develop an interpolating function that ‘‘looks like’’ the function traced out by our data, this inability to control a polynomial can lead to undesirable results. −1 0 1 0 0.5 1 1.5 x1 x2 x3 x4x5 x y Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 1 / 14
- 6. Lecture 8—Splines The problem with interpolating polynomials. Pn(x) = anxn + an−1xn−1 + · · · + a2x2 + a1x + a0 An order n interpolating polynomial has n + 1 degrees of freedom (a0 . . . an). We use all of these degrees of freedom to force the polynomial to agree with n + 1 data points. Consequently, we have no ability to control the behavior of the polynomial in between data points. Since the whole point is to develop an interpolating function that ‘‘looks like’’ the function traced out by our data, this inability to control a polynomial can lead to undesirable results. −1 0 1 0 0.5 1 1.5 x1 x2 x3 x4x5 x6 x7 x8 x9 x y Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 1 / 14
- 7. Lecture 8—Splines The problem with interpolating polynomials. Pn(x) = anxn + an−1xn−1 + · · · + a2x2 + a1x + a0 An order n interpolating polynomial has n + 1 degrees of freedom (a0 . . . an). We use all of these degrees of freedom to force the polynomial to agree with n + 1 data points. Consequently, we have no ability to control the behavior of the polynomial in between data points. Since the whole point is to develop an interpolating function that ‘‘looks like’’ the function traced out by our data, this inability to control a polynomial can lead to undesirable results. −1 0 1 0 0.5 1 1.5 x1 x2 x3 x4x5 x6 x7 x8 x9 x y Runge’s Function: f(x) = 1 1+25x2 Higher order does not always lead to higher accuracy. Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 1 / 14
- 8. Outline 1 Linear algebra application: Piecewise interpolating polynomials (splines) Quadratic Splines Cubic Splines Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 2 / 14
- 9. Splines — Using our degrees of freedom differently If we have n + 1 data points, we have at least n + 1 constraints to use in specifying an interpolating function. −0.5 0 0.5 0 0.5 1 x1 x2 x3 x4 Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 3 / 14
- 10. Splines — Using our degrees of freedom differently If we have n + 1 data points, we have at least n + 1 constraints to use in specifying an interpolating function. There are n sections defined by the n + 1 points. −0.5 0 0.5 0 0.5 1 x1 x2 x3 x4 Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 3 / 14
- 11. Splines — Using our degrees of freedom differently If we have n + 1 data points, we have at least n + 1 constraints to use in specifying an interpolating function. There are n sections defined by the n + 1 points. Instead of using a single order n polynomial to interpolate the data, we could use n 1st-order polynomials: s 1 i (x) = fi + fi+1 − fi xi+1 − xi (x − x1) The collection of lines together form the 1st order interpolating spline −0.5 0 0.5 0 0.5 1 x1 x2 x3 x4 s 1 1 (x) s1 2(x) s 1 3 (x) Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 3 / 14
- 12. Splines — Using our degrees of freedom differently A line has 2 degrees of freedom: s 1 i (x) = a0 + a1(x − xi ) There are 3 lines, for a total of 6 degrees freedom. For each line, s1 i (x), we require that it agrees with the point on the left side of its interval: s 1 i (xi ) = fi This costs 3 degrees of freedom. For each line, s1 i (x), we also require that it agrees with the point on the right side of its interval: s 1 i (xi+1) = fi+1 This costs the other 3 degrees of freedom. −0.5 0 0.5 0 0.5 1 x1 x2 x3 x4 s 1 1 (x) s1 2(x) s 1 3 (x) Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 3 / 14
- 13. Splines — Using our degrees of freedom differently 1st-order splines are not always useful since they still fail to represent the function described by the data in between data points. −0.5 0 0.5 0 0.5 1 x1 x2 x3 x4 s 1 1 (x) s1 2(x) s 1 3 (x) Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 3 / 14
- 14. Splines — Using our degrees of freedom differently 1st-order splines are not always useful since they still fail to represent the function described by the data in between data points. Furthermore, there are ‘‘sharp corners’’ (discontinuous derivatives) where each segment of the spline meets the next segment. −0.5 0 0.5 0 0.5 1 x1 x2 x3 x4 s 1 1 (x) s1 2(x) s 1 3 (x) Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 3 / 14
- 15. Splines — Using our degrees of freedom differently 1st-order splines are not always useful since they still fail to represent the function described by the data in between data points. Furthermore, there are ‘‘sharp corners’’ (discontinuous derivatives) where each segment of the spline meets the next segment. To fix this, we can add more degrees of freedom to our spline. Instead of using lines to connect the points, we could use parabolas: s 2 i (x) = a0 + a1(x − xi ) + a2(x − xi ) 2 −0.5 0 0.5 0 0.5 1 x1 x2 x3 x4 s 1 1 (x) s1 2(x) s 1 3 (x) Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 3 / 14
- 16. Splines — Using our degrees of freedom differently Each parabola has 3 degrees of freedom. We have n intervals, for a total of 3n degrees of freedom. s 2 i (x) = a0 + a1(x − xi ) + a2(x − xi ) 2 We start by drawing any parabola that connects the first 2 points. This costs 3 degrees of freedom. −0.5 0 0.5 0 0.5 1 x1 x2 x3 x4 s2 1(x) Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 3 / 14
- 17. Splines — Using our degrees of freedom differently Each parabola has 3 degrees of freedom. We have n intervals, for a total of 3n degrees of freedom. s 2 i (x) = a0 + a1(x − xi ) + a2(x − xi ) 2 We start by drawing any parabola that connects the first 2 points. This costs 3 degrees of freedom. For the next segment, we require that: 1 s2 2(x2) = f2 2 s2 2(x3) = f3 3 s2 2 (x2) = s2 1 (x2) The last requirement forces the next segment to have the same slope as the last segment where they connect. −0.5 0 0.5 0 0.5 1 x1 x2 x3 x4 s2 1(x) s2 2 (x) Runge’s Function: f(x) = 1 1+25x2 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 3 / 14
- 18. Splines — Using our degrees of freedom differently Each parabola has 3 degrees of freedom. We have n intervals, for a total of 3n degrees of freedom. s 2 i (x) = a0 + a1(x − xi ) + a2(x − xi ) 2 We start by drawing any parabola that connects the first 2 points. This costs 3 degrees of freedom. For the next segment, we require that: 1 s2 2(x2) = f2 2 s2 2(x3) = f3 3 s2 2 (x2) = s2 1 (x2) The last requirement forces the next segment to have the same slope as the last segment where they connect. We repeat this for each of the remaining segments. −0.5 0 0.5 0 0.5 1 x1 x2 x3 x4 s2 1(x) s2 2 (x) s 2 3 (x) Runge’s Function: f(x) = 1 1+25x2 We repeat this for each of the remaining segments. Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 3 / 14
- 19. How do we determine the spline coefficients? Using the first constraint, write out the spline equation: s 2 i (xi ) = ai + bi (xi − xi ) + ci (xi − xi ) 2 = fi ai = fi Constraints for each spline: s2 i (x) = ai + bi (x − xi ) h +ci h2 1 Segment i must agree with the point on the left: s 2 i (xi ) = fi 2 Segment i must agree with the point on the right: s 2 i (xi+1) = fi+1 3 The derivative of segment i must agree with that of segment i + 1 at xi+1 s 2 i (xi+1) = s 2 i+1 (xi+1) Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 4 / 14
- 20. How do we determine the spline coefficients? Using the first constraint, write out the spline equation: s 2 i (xi ) = ai + bi (xi − xi ) + ci (xi − xi ) 2 = fi ai = fi Now write out the second constraint, with hi = xi+1 − xi s 2 i (xi+1) = fi + bi hi + ci h 2 i+1 = fi+1 fi+1 = fi + bi hi + ci h 2 i+1 Constraints for each spline: s2 i (x) = ai + bi (x − xi ) h +ci h2 1 Segment i must agree with the point on the left: s 2 i (xi ) = fi 2 Segment i must agree with the point on the right: s 2 i (xi+1) = fi+1 3 The derivative of segment i must agree with that of segment i + 1 at xi+1 s 2 i (xi+1) = s 2 i+1 (xi+1) Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 4 / 14
- 21. How do we determine the spline coefficients? Using the first constraint, write out the spline equation: s 2 i (xi ) = ai + bi (xi − xi ) + ci (xi − xi ) 2 = fi ai = fi Now write out the second constraint, with hi = xi+1 − xi s 2 i (xi+1) = fi + bi hi + ci h 2 i+1 = fi+1 fi+1 = fi + bi hi + ci h 2 i+1 Rearrange this last equation: fi+1 − fi hi = fi+1 − fi xi+1 − xi = i = bi + ci hi+1 i = bi + ci hi+1 Constraints for each spline: s2 i (x) = ai + bi (x − xi ) h +ci h2 1 Segment i must agree with the point on the left: s 2 i (xi ) = fi 2 Segment i must agree with the point on the right: s 2 i (xi+1) = fi+1 3 The derivative of segment i must agree with that of segment i + 1 at xi+1 s 2 i (xi+1) = s 2 i+1 (xi+1) Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 4 / 14
- 22. How do we determine the spline coefficients? Using the first constraint, write out the spline equation: s 2 i (xi ) = ai + bi (xi − xi ) + ci (xi − xi ) 2 = fi ai = fi Now write out the second constraint, with hi = xi+1 − xi s 2 i (xi+1) = fi + bi hi + ci h 2 i+1 = fi+1 fi+1 = fi + bi hi + ci h 2 i+1 Rearrange this last equation: fi+1 − fi hi = fi+1 − fi xi+1 − xi = i = bi + ci hi+1 i = bi + ci hi+1 Now write out the third constraint: bi + 2ci (xi+1 − xi ) = bi+1 + 2ci (xi+1 − xi+1) ci = bi+1 − bi 2hi Constraints for each spline: s2 i (x) = ai + bi (x − xi ) h +ci h2 1 Segment i must agree with the point on the left: s 2 i (xi ) = fi 2 Segment i must agree with the point on the right: s 2 i (xi+1) = fi+1 3 The derivative of segment i must agree with that of segment i + 1 at xi+1 s 2 i (xi+1) = s 2 i+1 (xi+1) Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 4 / 14
- 23. How do we determine the spline coefficients? Insert (3) into (2): i = bi + bi+1 − bi 2hi hi Important results so far: s2 i (x) = ai + bi h + ci h2 1 ai = fi 2 i = bi + ci hi 3 ci = bi+1 − bi 2hi = i − bi hi Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 5 / 14
- 24. How do we determine the spline coefficients? Insert (3) into (2): i = bi + bi+1 − bi 2hi hi The hi cancel: i = bi + bi+1 − bi 2 Important results so far: s2 i (x) = ai + bi h + ci h2 1 ai = fi 2 i = bi + ci hi 3 ci = bi+1 − bi 2hi = i − bi hi Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 5 / 14
- 25. How do we determine the spline coefficients? Insert (3) into (2): i = bi + bi+1 − bi 2hi hi The hi cancel: i = bi + bi+1 − bi 2 So bi + bi+1 unknown = 2 i known Important results so far: s2 i (x) = ai + bi h + ci h2 1 ai = fi 2 i = bi + ci hi 3 ci = bi+1 − bi 2hi = i − bi hi Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 5 / 14
- 26. How do we determine the spline coefficients? We can formulate a linear system of equations to find the bi : Suppose that we have 4 data points, so we need 3 splines: b1 +b2 = 2 1 b2 +b3 = 2 2 Important results so far: s2 i (x) = ai + bi h + ci h2 1 ai = fi 2 bi + bi+1 = 2 i 3 ci = bi+1 − bi 2hi = i − bi hi Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 6 / 14
- 27. How do we determine the spline coefficients? We can formulate a linear system of equations to find the bi : Suppose that we have 4 data points, so we need 3 splines: b1 +b2 = 2 1 b2 +b3 = 2 2 We have 3 unknown bi , but only 2 equations so far. We can write (2) one more time if we introduce a forth b, b4: b1 +b2 = 2 1 b2 +b3 = 2 2 b3 +b4 = 2 3 Important results so far: s2 i (x) = ai + bi h + ci h2 1 ai = fi 2 bi + bi+1 = 2 i 3 ci = bi+1 − bi 2hi = i − bi hi Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 6 / 14
- 28. How do we determine the spline coefficients? Now we have 3 equations and 4 unknowns. The final equation comes from the fact that the first parabola we draw can be any parabola that connects the first two points. We can choose any value for b1. b1 = our choice b1 + b2 = 2 1 b2 + b3 = 2 2 b3 + b4 = 2 3 A common choice is to force the first segment to be a linear segment: b1 = 1 Important results so far: s2 i (x) = ai + bi h + ci h2 1 ai = fi 2 bi + bi+1 = 2 i 3 ci = bi+1 − bi 2hi = i − bi hi Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 6 / 14
- 29. Generating a quadratic spline An example with Runge’s function Fit Runge’s Function with a 5 data-point spline First define the data points and the i and hi: x = linspace(-1,1,5)’;% Column vector! y = 1 ./ (1 + 25 .* x.^2);% clf; hold on; plot(x,y,’o’);% 5 fplot(@(x)1./(1+25.*x.^2),[-1 1]);% h = x(2:end) - x(1:end-1);% nabla = ( y(2:end)- y(1:end-1) ) ./ h; We have 5 data points. So there are 4 parabolas for which we must calculate coefficients. The constant term is the easiest, just the first 4 y-values: a = y(1:end-1); % There are 5 y-values, but only % the first 4 are used. % (One per spline segment.) −1 −0.5 0 0.5 1 0 1 x y Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 7 / 14
- 30. Generating a quadratic spline An example with Runge’s function Fit Runge’s Function with a 5 data-point spline The next step is to calculate the linear terms. These are given by the equations: b1 + b2 = 2 1 = 2 y2−y1 x2−x1 b2 + b3 = 2 2 = 2 y3−y2 x3−x2 b3 + b4 = 2 3 = 2 y4−y3 x4−x3 b4 + b5 = 2 4 = 2 y5−y4 x5−x4 Where did b5 come from? There are only 4 spline segments in this example. It turns out that this extra b-value is needed to calculate the c-value for the last segment: c4 = b5 − b4 h4 −1 −0.5 0 0.5 1 0 1 x y Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 8 / 14
- 31. Generating a quadratic spline An example with Runge’s function Fit Runge’s Function with a 5 data-point spline The next step is to calculate the linear terms. These are given by the equations: b1 = 1 b1 + b2 = 2 1 = 2 y2−y1 x2−x1 b2 + b3 = 2 2 = 2 y3−y2 x3−x2 b3 + b4 = 2 3 = 2 y4−y3 x4−x3 b4 + b5 = 2 4 = 2 y5−y4 x5−x4 Where did b5 come from? There are only 4 spline segments in this example. It turns out that this extra b-value is needed to calculate the c-value for the last segment: c4 = b5 − b4 h4 So far there are 4 equations but 5 unknown bi values. This is where we must specify the extra degree of freedom. For example, setting b1 = 1 forces the segment starting at x1 and ending at x2 to be linear. −1 −0.5 0 0.5 1 0 1 x y Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 8 / 14
- 32. Generating a quadratic spline An example with Runge’s function Fit Runge’s Function with a 5 data-point spline The next step is to calculate the linear terms. These are given by the equations: 1 0 0 0 0 1 1 0 0 0 0 1 1 0 0 0 0 1 1 0 0 0 0 1 1 b1 b2 b3 b4 b5 = 1 2 1 2 2 2 3 2 4 B = eye(length(x));% for ii = 2:length(x) B(ii,ii-1) = 1; end;% 5 rhs = [ nabla(1) ; 2*nabla ];% b = B rhs; % Remember, b has 5 elements although there are % only 4 spline segments. −1 −0.5 0 0.5 1 0 1 x y Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 8 / 14
- 33. Generating a quadratic spline An example with Runge’s function Fit Runge’s Function with a 5 data-point spline Finally, the ci parameters can be calculated using: ci = i − bi hi % Remember, there are 5 b-values but only 4 spline % segments. c = (nabla - b(1:end-1)) ./ h; % Collect all of the coefficients 5 % (the MATLAB piecewise-polynomial % format calls them ’coefs’ ) coefs = [ c b(1:end-1) a ]; % −1 0 1 0 1 x1 x2 x3 x4 x5 xy Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 9 / 14
- 34. Generating a quadratic spline An example with Runge’s function Fit Runge’s Function with a 5 data-point spline Each row of S contains the polynomial coefficients in Matlab format. For a point x, the proper row is determined by the original x-data: If x < x2, then plot using the first row of S: x = linspace(-1.25,-0.5);% s1 = polyval(S(1,1:3),x-S(1,4));% plot(x,s1,’r’); −1 0 1 0 1 x1 x2 x3 x4 x5 xy Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 9 / 14
- 35. Generating a quadratic spline An example with Runge’s function Fit Runge’s Function with a 5 data-point spline Each row of S contains the polynomial coefficients in Matlab format. For a point x, the proper row is determined by the original x-data: If x ≥ xi and x < xi+1, use row i: % From x_2 to x_3 x = linspace(-0.5,0.0);% s1 = polyval(S(2,1:3),x-S(2,4);% plot(x,s1,’g’); 5 % From x_3 to x_4 x = linspace(0.,0.5);% s1 = polyval(S(3,1:3),x-S(3,4);% plot(x,s1,’g’); −1 0 1 0 1 x1 x2 x3 x4 x5 xy Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 9 / 14
- 36. Generating a quadratic spline An example with Runge’s function Fit Runge’s Function with a 5 data-point spline Each row of S contains the polynomial coefficients in Matlab format. For a point x, the proper row is determined by the original x-data: If x > x4, use row 4: x = linspace(0.5,1.1);% s1 = polyval(S(4,1:3),x-S(4,4));% plot(x,s1,’r’); −1 0 1 0 1 x1 x2 x3 x4 x5 xy Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 9 / 14
- 37. Generating a quadratic spline An example with Runge’s function Fit Runge’s Function with a 5 data-point spline Matlab can simplify evaluation of splines using it’s ‘‘Piecewise polynomial’’ processing functions: % Transfer the spline data into Matlab’s % ’pp’ data structure % mkpp - Make Piecewise Polynomial my_spline = mkpp(x,coefs); 5 % Use the ppval command to evaluate the spline anywhere fplot(@(x)ppval(my_spline,x),xlim); −1 0 1 0 1 x1 x2 x3 x4 x5 xy Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 9 / 14
- 38. Outline 1 Linear algebra application: Piecewise interpolating polynomials (splines) Quadratic Splines Cubic Splines Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 10 / 14
- 39. Cubic splines — the interpolation method of choice Quadratic splines often fail to reproduce the original function in between data points because the curvature of the parabolas (si (x)) are mismatched. Cubic splines fix this problem by adding an additional degree of freedom Cubic splines: Use 4 degrees of freedom to interpolate between only 2 points si(x) = a + b(x − xi) + c(x − xi)2 + d(x − xi)3 Constraints: 1 si(xi) = f(xi) (Interpolates the left point) 2 si(xi+1) = f(xi+1) (Interpolates the right point) 3 si (xi+1) = si+1 (xi+1) (Continuous derivatives) 4 si (xi+1) = si+1 (xi+1) (Continuous curvature) Constraints 3 and 4 ensure that each spline segment smoothly connects with its neighbors. Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 11 / 14
- 40. Cubic Splines Degrees of freedom Suppose there are n data points. 0.5 1 1.5 2 2.5 3 3.5 4 4.5 −0.5 0 0.5 1 1.5 s1 4 constraints s2 4 constraints s3 Only 2 constraints! x1 x2 x3 x4 x y 4 data points, 3 spline segments = 12 DOFs Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 12 / 14
- 41. Cubic Splines Degrees of freedom Suppose there are n data points. Then there are n − 1 cubic polynomials connecting them 0.5 1 1.5 2 2.5 3 3.5 4 4.5 −0.5 0 0.5 1 1.5 s1 4 constraints s2 4 constraints s3 Only 2 constraints! x1 x2 x3 x4 x y 4 data points, 3 spline segments = 12 DOFs Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 12 / 14
- 42. Cubic Splines Degrees of freedom Suppose there are n data points. Then there are n − 1 cubic polynomials connecting them Each cubic polynomial has 4 degrees of freedom 0.5 1 1.5 2 2.5 3 3.5 4 4.5 −0.5 0 0.5 1 1.5 s1 4 constraints s2 4 constraints s3 Only 2 constraints! x1 x2 x3 x4 x y 4 data points, 3 spline segments = 12 DOFs Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 12 / 14
- 43. Cubic Splines Degrees of freedom Suppose there are n data points. Then there are n − 1 cubic polynomials connecting them Each cubic polynomial has 4 degrees of freedom The first n − 2 segments are subject to 4 constraints. 0.5 1 1.5 2 2.5 3 3.5 4 4.5 −0.5 0 0.5 1 1.5 s1 4 constraints s2 4 constraints s3 Only 2 constraints! x1 x2 x3 x4 x y 4 data points, 3 spline segments = 12 DOFs Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 12 / 14
- 44. Cubic Splines Degrees of freedom Suppose there are n data points. Then there are n − 1 cubic polynomials connecting them Each cubic polynomial has 4 degrees of freedom The first n − 2 segments are subject to 4 constraints. The last segment must satisfy only (1) and (2) — there is no next segment with which to match s and s 0.5 1 1.5 2 2.5 3 3.5 4 4.5 −0.5 0 0.5 1 1.5 s1 4 constraints s2 4 constraints s3 Only 2 constraints! x1 x2 x3 x4 x y 4 data points, 3 spline segments = 12 DOFs Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 12 / 14
- 45. Cubic Splines Degrees of freedom Suppose there are n data points. Then there are n − 1 cubic polynomials connecting them Each cubic polynomial has 4 degrees of freedom The first n − 2 segments are subject to 4 constraints. The last segment must satisfy only (1) and (2) — there is no next segment with which to match s and s Total DOFS = 4(n − 1) 0.5 1 1.5 2 2.5 3 3.5 4 4.5 −0.5 0 0.5 1 1.5 s1 4 constraints s2 4 constraints s3 Only 2 constraints! x1 x2 x3 x4 x y 4 data points, 3 spline segments = 12 DOFs Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 12 / 14
- 46. Cubic Splines Degrees of freedom Suppose there are n data points. Then there are n − 1 cubic polynomials connecting them Each cubic polynomial has 4 degrees of freedom The first n − 2 segments are subject to 4 constraints. The last segment must satisfy only (1) and (2) — there is no next segment with which to match s and s Total DOFS = 4(n − 1) Total constraints = 4(n − 2) + 2 ⇒ A cubic spline requires 2 additional constraints 0.5 1 1.5 2 2.5 3 3.5 4 4.5 −0.5 0 0.5 1 1.5 s1 4 constraints s2 4 constraints s3 Only 2 constraints! x1 x2 x3 x4 x y 4 data points, 3 spline segments = 12 DOFs Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 12 / 14
- 47. Cubic Splines Three common types — Differentiated by how the 2 constraints are chosen Natural Splines Second derivative is 0 at first and last points c1 = cn = 0 −1 −0.5 0 0.5 1 0 0.5 1 x1 x2 x3 x4 x5 Data Spline Clamped Splines Specify the first derivative is at the first and last points −1 −0.5 0 0.5 1 0 0.5 1 x1 x2 x3 x4 x5 s 1(x1)=1 sn (xn+1 )=−1 Data Spline Not-a-knot Splines Force continuity of third derivative for the first and last segments: s1 (x2) = s2 (x2) and sn (xn) = sn−1(xn) −1 −0.5 0 0.5 1 0 0.5 1 x1 x2 x3 x4 x5 Data Spline Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 13 / 14
- 48. The cubic spline equations For a spline based on n data points there are n − 1 spline segments: 1 ai = f(xi) Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 14 / 14
- 49. The cubic spline equations For a spline based on n data points there are n − 1 spline segments: 1 ai = f(xi) 2 n − 2 linear equations for the ci’s: hi−1ci−1 + 2(hi−1 + hi)ci + hici+1 = 3( i − i−1) Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 14 / 14
- 50. The cubic spline equations For a spline based on n data points there are n − 1 spline segments: 1 ai = f(xi) 2 n − 2 linear equations for the ci’s: hi−1ci−1 + 2(hi−1 + hi)ci + hici+1 = 3( i − i−1) 3 Two linear equations for c1 and cn using spline conditions: Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 14 / 14
- 51. The cubic spline equations For a spline based on n data points there are n − 1 spline segments: 1 ai = f(xi) 2 n − 2 linear equations for the ci’s: hi−1ci−1 + 2(hi−1 + hi)ci + hici+1 = 3( i − i−1) 3 Two linear equations for c1 and cn using spline conditions: Natural c1 = cn = 0 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 14 / 14
- 52. The cubic spline equations For a spline based on n data points there are n − 1 spline segments: 1 ai = f(xi) 2 n − 2 linear equations for the ci’s: hi−1ci−1 + 2(hi−1 + hi)ci + hici+1 = 3( i − i−1) 3 Two linear equations for c1 and cn using spline conditions: Natural c1 = cn = 0 Clamped The user specifies the spline derivatives f1 and fn at x1 and xn 2h1c1 + h1c2 = 3( 1 − f1) hn−1cn−1 + 2hn−1cn = 3(fn − n) Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 14 / 14
- 53. The cubic spline equations For a spline based on n data points there are n − 1 spline segments: 1 ai = f(xi) 2 n − 2 linear equations for the ci’s: hi−1ci−1 + 2(hi−1 + hi)ci + hici+1 = 3( i − i−1) 3 Two linear equations for c1 and cn using spline conditions: Natural c1 = cn = 0 Clamped The user specifies the spline derivatives f1 and fn at x1 and xn 2h1c1 + h1c2 = 3( 1 − f1) hn−1cn−1 + 2hn−1cn = 3(fn − n) Not-a-knot h2c1 − (h1 + h2)c2 + h1c3 = 0 hn−1cn−2 − (hn−2 + hn−1)cn−1 + hn−2cn = 0 Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 14 / 14
- 54. The cubic spline equations For a spline based on n data points there are n − 1 spline segments: 1 ai = f(xi) 2 n − 2 linear equations for the ci’s: hi−1ci−1 + 2(hi−1 + hi)ci + hici+1 = 3( i − i−1) 3 Two linear equations for c1 and cn using spline conditions: Natural c1 = cn = 0 Clamped The user specifies the spline derivatives f1 and fn at x1 and xn 2h1c1 + h1c2 = 3( 1 − f1) hn−1cn−1 + 2hn−1cn = 3(fn − n) Not-a-knot h2c1 − (h1 + h2)c2 + h1c3 = 0 hn−1cn−2 − (hn−2 + hn−1)cn−1 + hn−2cn = 0 With known ci’s, bi = i − hi 3 (ci+1 + 2ci) di = 1 3hi (ci+1 − ci) Che 310 | Chapra 18 | Splines 8 — Splines October 24, 2017 14 / 14