
Recommended
Recommended
More Related Content
Similar to Parking lot
Similar to Parking lot (20)
Recently uploaded
Recently uploaded (20)
Parking lot
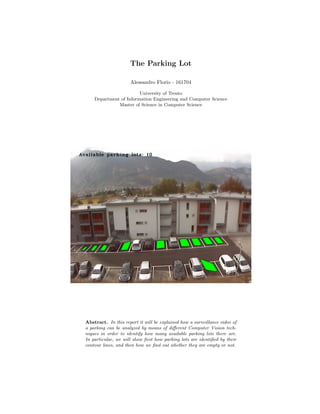
- 1. The Parking Lot Alessandro Florio - 161704 University of Trento Department of Information Engineering and Computer Science Master of Science in Computer Science Abstract. In this report it will be explained how a surveillance video of a parking can be analyzed by means of different Computer Vision tech- niques in order to identify how many available parking lots there are. In particular, we will show first how parking lots are identified by their contour lines, and then how we find out whether they are empty or not.
- 2. Table of Contents 1 Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2 Frame analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2.1 Preprocessing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2.2 Rectangle detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 Identification of parking lots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 3.1 Polygon extraction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 3.2 Parking lot emptiness check . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 4 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 1 Introduction In this section we will briefly explain how the algorithm is structured, leaving to the following sections a more detailed description of each main subpart. The algorithm is structured into two distinct phases and has a period of NFRAMES - set to 200 - frames. One phase consists in identifying the parking lots in a frame, as it will be explained in section 2, for the first NFRAMES-1 frames. The second phase, which occurs at the remaining frame of each period, consists in analyzing the output of the first one in order to detect where exactly parking lots are and whether they are free or busy, as it will be explained in section 3. 2 Frame analysis This phase takes one frame from the video and analyzes it to find out where parking lots are; we recall that this phase is repeated for NFRAMES-1 frames before passing to the second one. 2.1 Preprocessing First of all, the frame is converted into a gray-scale image; then the Canny edge detector algorithm is run to detect the possible edges. Since the Canny algorithm produces two edges for each parking contour line, we dilate the output and then compute its skeleton. Grayscale Canny Skeleton
- 3. Once edges have been detected, the following step consists into defining lines, which successively are going to identify parking lots. For this purpose, a proba- bilistic Hough transform is applied to the skeleton image. Skeleton Lines 2.2 Rectangle detection In order to be able to detect a parking lot, we started from the assumption that this is - in the real world - a rectangle. In the provided video, instead, there is an unavoidable distortion, in addition to a non-aligned perspective. Moreover, only three out of the four borders are painted on the asphalt. Therefore, in this case we identify a parking lot as a pseudo-horizontal line which intersects two pseudo-vertical lines. We consider horizontal lines all those lines for which the absolute value of their slope is smaller or equal than 1/2, and vertical lines all the remaining ones. The algorithm then runs this way: for every line, if it is a vertical line we loop on all the horizontal lines and see whether they intersect1 ; if they do intersect, the intersection point and the other endpoint of the vertical line are saved. When all lines have been tested for a horizontal line, points closer than 15 pixels are merged and substituted by their average, because they were probably generated by other noise lines intersecting the horizontal one. Finally, if for that horizontal line four points were found (two intersections and the other two endpoints of the two vertical lines), a quadrilateral polygon is drawn on a temporary binary image; if the number of points is greater than four but is even, it is the case that the same horizontal line is detected for two different parking lots: so points are ordered by the x coordinate, and taken four at a time, by shifting of two points, because two intermediate points belong both to the first and to the second park- ing lot. Also in this case, the quadrilateral polygons are drawn on the temporary binary image. 1 Actually, lines are elongated by 12 pixels on each side because - due to erosion or to a non-optimal configuration of the Hough transform - they may be shorter than how they should be.
- 4. When parking lots have been drawn for all horizontal lines, the image containing all the parking lots of the frame is added - with a transparency proportional to NFRAMES - to another external image, which will collect all the parking lots of the NFRAMES-1 frames. 3 Identification of parking lots This phase takes the image produced by the fist phase for the previous NFRAMES- 1 frames; we recall that this phase occurs every NFRAMES frames, while for the other frames only the first one is run2 . 3.1 Polygon extraction As it can be seen in the image above, the input image of this phase is an average of the parking lots found during all the iterations of the first phase. This step was needed because little light changes from frame to frame led to different results in the preprocessing and line identification steps. Taking the average instead leads to more robust results. Since at each frame the found lots were drawn white on a black background and with an adequate transparency, in order to find the areas which were mostly identified as parking lots, we have to consider the brighter pixels, and this is done by thresholding the image into a binary image. After an opening operation aimed at eliminating possible overlaps, contours of the different parking lots are found, and polygons are substituted by their convex hull. 2 When this phase runs, the frame doesn’t take part to the parking lot identification. However, since NFRAMES is a great number, a single frame doesn’t influence that much, and allows a faster computation during this phase.
- 5. Input Thresholding, opening, convex hull 3.2 Parking lot emptiness check Since cars parked at the center of the parking, where almost no distortion in the video occurs, do not occlude the parking lines, those lots can be identified as available; therefore it is useful to check whether they are really available or not. This is done by computing the histogram of all the hulls obtained above (in the HSV color space, and considering only hue and saturation), and then comparing the histogram of each found lot with all the other; if the correlation with other lots is overall greater than 25%, it is marked as a free parking lot, otherwise either is the parking lot busy or it is not a parking lot at all, but a noise polygon. Input RGB HSV Output
- 6. Finally, all the parking lots that have been found to be available are drawn on the frame of the video that is going to be shown in a window, and will be drawn until this second phase is repeated in the next iterations. 4 Results We have presented a system able to detect available parking lots by finding their contour lines, and to check whether they are available by comparing their histograms with the ones of other found lots. However, since too many parameters - which had to be found out empirically - are involved, the algorithm is not 100% precise. In particular, we register both false negatives (when the contour lines of the parking lot are not correctly detected or are occluded by cars parked in the near lot) and false positives (when the histogram check is not as accurate as desired). In our implementation we had to make a trade-off between false positive and false negatives; in our opinion it was more important to have few false positives and more false negatives rather than the opposite: it is better to think a parking is full and maybe there is some space, rather than believing it is free and not finding an available parking lot! In some cases also one line dividing two parking lots was not detected, and at the end two lots were recognized as a single one. Moreover, due to light changes, even if the situation remains the same, the first phase of the program can provide different result, and consequently also the second phase from one time to another. By analizing the results of the algorithm on the entire video, we came out with a precision of 93.7%, meaning that we could well spot out busy parking lots, but a recall of 64.7%, which shows that many false negatives were found, due to the comparison of the area inside the found polygons through histograms. The parameters we have set are strong enough to avoid in most cases false positives, but too strong to correctly recognize free parking lots. 5 Conclusion The parking lot detector provided works well in optimal situations, but still has some problem with noise in frames. A greater video quality may reduce artifacts that lead to wrong interpretations. Also having a video where different scenarios were shown could have made the algorithm more robust to other situations whose patterns could not be taken into account.