Downloaded 333 times




![Vacuum-cleaner world
Percepts: location and contents, e.g.,
[A,Dirty]
Actions: Left, Right, Suck, NoOp](https://image.slidesharecdn.com/3-160311081941/85/Artificial-Intelligence-7-320.jpg)


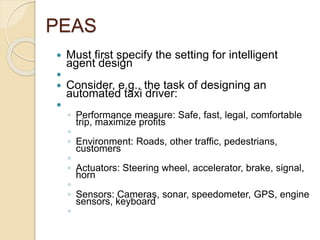



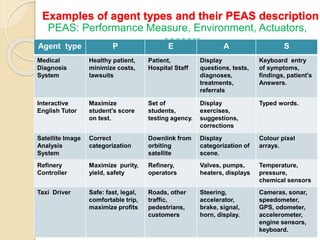


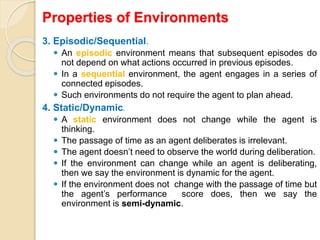


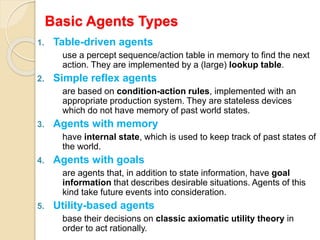
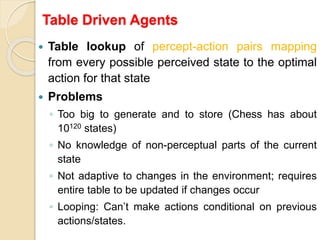





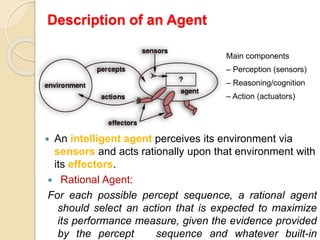
Artificial intelligence agents can be defined as entities that perceive their environment through sensors, and act upon the environment through effectors to achieve goals or perform tasks. The document discusses different types of agents including table-driven agents, reflex agents, agents with memory, goal-based agents, and utility-based agents. It also covers key concepts in agent design like the PEAS framework and properties of environments that agents operate in.