Gesture based vehicle movements control and alerting system docu
•Download as DOC, PDF•
1 like•2,029 views

Gesture based vehicle movements control and alerting system edited by D. VIGNAN

Recommended
More Related Content
What's hot
What's hot (19)
Viewers also liked
Viewers also liked (6)
Similar to Gesture based vehicle movements control and alerting system docu
Similar to Gesture based vehicle movements control and alerting system docu (20)
Recently uploaded
Recently uploaded (20)
Gesture based vehicle movements control and alerting system docu
- 1. GESTURE BASED VEHICLE MOVEMENTS CONTROL AND ALERTING SYSTEM INDEX CONTENTS 1. Abbreviations 2. Figure Locations 3. Introduction 4. Block Diagram 5. Block Diagram Description 6. Schematic 7. Schematic Description 8. Hardware Components • Micro controller • LCD Display • Power Supply • MEMS • Voice IC • L293D 9. Circuit Description 10. Software components a. About Keil b. Embedded ‘C’ 11. Source Code 12. Conclusion (or) Synopsis 13. Future Aspects 14. Bibliography
- 2. ABBREVIATIONS Symbol ACC B PSW SP DPTR DPL DPH P0 P1 P2 P3 IP IE TMOD TCON T2CON T2MOD TH0 TL0 TH1 TL1 TH2 TL2 SCON SBUF PCON Name Accumulator B register Program status word Stack pointer Data pointer 2 bytes Low byte High byte Port0 Port1 Port2 Port3 Interrupt priority control Interrupt enable control Timer/counter mode control Timer/counter control Timer/counter 2 control Timer/counter mode2 control Timer/counter 0high byte Timer/counter 0 low byte Timer/counter 1 high byte Timer/counter 1 low byte Timer/counter 2 high byte Timer/counter 2 low byte Serial control Serial data buffer Power control
- 3. Figure Locations S.No. 1 2 3 4 5 6 7 8 9 Figure Components of Typical Linear Power Supply An Electrical Transformer Bridge Rectifier Bridge Rectifier Positive Cycle Bridge Rectifier Negative Cycle Three terminal voltage Regulator Functional Diagram of Microcontroller Pin Diagram of Microcontroller Oscillator connections Page No.
- 4. 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 External clock drive connections A register B register RAM RAM Allocation Register Banks PSW DPTR SP PORT 0 TL0 and TH0 DB9 Connecting Microcontroller to PC Types of SIM Structures Smart Card Pin-out Smart Card Reader LCD MAX 232 Pin-out MAX 232 Operating circuit MAX 232 Logic output Project New Project Select Target device Select device for Target Copy 8051 startup code Source group 1 New file Opened new file File Save Add files to the source group Adding files to the source group Compilation After Compilation Build Selecting the Ports to be visualized Start Debugging
- 5. INTRODUCTION EMBEDDED SYSTEM: An embedded system is a special-purpose system in which the computer is completely encapsulated by or dedicated to the device or system it controls. Unlike a general-purpose computer, such as a personal computer, an embedded system performs one or a few predefined tasks, usually with very specific requirements. Since the system is dedicated to specific tasks, design engineers can optimize it, reducing the size and cost of the product. Embedded systems are often mass-produced, benefiting from economies of scale. Personal digital assistants (PDAs) or handheld computers are generally considered embedded devices because of the nature of their hardware design, even though they are more expandable in software terms. This line of definition continues to blur as devices expand. With the introduction of the OQO Model 2 with the Windows XP operating system and ports such as a USB port — both features usually belong to "general purpose computers", — the line of nomenclature blurs even more. Physically, embedded systems ranges from portable devices such as digital watches and MP3 players, to large stationary installations like traffic lights, factory controllers, or the systems controlling nuclear power plants. In terms of complexity embedded systems can range from very simple with a single microcontroller chip, to very complex with multiple units, peripherals and networks mounted inside a large chassis or enclosure.
- 6. Examples of Embedded Systems: • Avionics, such as inertial guidance systems, flight control hardware/software and other integrated systems in aircraft and missiles • Cellular telephones and telephone switches • Engine controllers and antilock brake controllers for automobiles • Home automation products, such as thermostats, air conditioners, sprinklers, and security monitoring systems • Handheld calculators • Handheld computers • Household appliances, including microwave ovens, washing machines, television sets, DVD players and recorders • Medical equipment • Personal digital assistant • Videogame consoles • Computer peripherals such as routers and printers. • Industrial controllers for remote machine operation. BLOCK DIAGRAM:
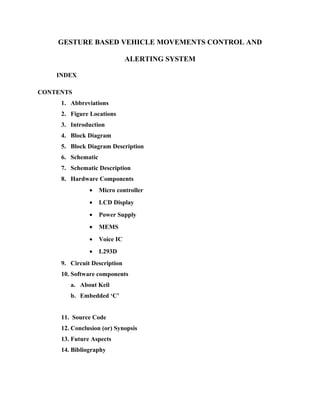
- 7. LCD POWER SUPPLY MICRO CONTROLLER UNIT (AT89S52) MOTOR DRIVER MOTORS MEMS VOICE IC SPEAKER BLOCK DIAGRAM DESCRIPTION Power Supply Section: This section is meant for supplying Power to all the sections mentioned above. It basically consists of a Transformer to step down the 230V ac to 9V ac followed by diodes. Here diodes are used to rectify the ac to dc. After rectification the obtained rippled dc is filtered using a capacitor Filter. A positive voltage regulator is used to regulate the obtained dc voltage. Microcontroller Section: This section forms the control unit of the whole project. This section basically consists of a Microcontroller with its associated circuitry like Crystal with capacitors, Reset circuitry, Pull up resistors (if needed) and so on. The Microcontroller forms the heart of the project because it controls the devices being interfaced and communicates with the devices according to the program being written. Driver circuit: L293d is to construct with transistors and Motor. It is used to rotate the device. MOTORS: Motor is an output device; its speed will be varied according to the speed set by the switches. The speed can be varied by varying the voltage given to the PWM converter (using
- 8. keypad). The speed of DC motor is directly proportional to armature voltage and inversely proportional to flux. By maintaining the flux constant, the speed can be varied by varying the armature voltage. MEMS: Accelerometers are acceleration sensors. An inertial mass suspended by springs is acted upon by acceleration forces that cause the mass to be deflected from its initial position. This deflection is converted to an electrical signal, which appears at the sensor output. The application of MEMS technology to accelerometers is a relatively new development. VOICE IC: Here we can store or record our voice in the ic and we can play back that voice LCD Display Section: This section is basically meant to show up the status of the project. This project makes use of Liquid Crystal Display to display / prompt for necessary information. Hardware Components • Micro controller • LCD Display • Power Supply • MEMS • Voice IC • L293D Hardware Components explanation:
- 9. AT89S52 8-bit Microcontroller with 8K Bytes In-System Programmable Flash Features • Compatible with MCS-51® Products • 8K Bytes of In-System Programmable (ISP) Flash Memory – Endurance: 1000 Write/Erase Cycles • 4.0V to 5.5V Operating Range • Fully Static Operation: 0 Hz to 33 MHz • Three-level Program Memory Lock • 256 x 8-bit Internal RAM • 32 Programmable I/O Lines • Three 16-bit Timer/Counters • Eight Interrupt Sources • Full Duplex UART Serial Channel • Low-power Idle and Power-down Modes • Interrupt Recovery from Power-down Mode • Watchdog Timer • Dual Data Pointer • Power-off Flag Description The AT89S52 is a low-power, high-performance CMOS 8-bit microcontroller with 8K bytes of in-system programmable Flash memory. The device is manufactured using Atmel’s high-density nonvolatile memory technology and is compatible with the industry- standard 80C51 instruction set and pinout. The on-chip Flash allows the program memory to be reprogrammed in-system or by a conventional nonvolatile memory programmer. By combining a versatile 8-bit CPU with insystem programmable Flash on a monolithic chip, the Atmel AT89S52 is a powerful microcontroller which provides a highly-flexible and cost-effective solution to many embedded control applications. The AT89S52 provides the following standard features: 8K bytes of Flash,
- 10. 256 bytes of RAM, 32 I/O lines, Watchdog timer, two data pointers, three 16-bit timer/counters, a six-vector two-level interrupt architecture, a full duplex serial port, on-chip oscillator, and clock circuitry. In addition, the AT89S52 is designed with static logic for operation down to zero frequency and supports two software selectable power saving modes. The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port, and interrupt system to continue functioning. The Power-down mode saves the RAM contents but freezes the oscillator, disabling all other chip functions until the next interrupt or hardware reset.
- 11. Pin Description VCC Supply voltage. GND Ground. Port 0 Port 0 is an 8-bit open drain bidirectional I/O port. As an output port, each pin can sink eight TTL inputs. When 1s are written to port 0 pins, the pins can be used as high impedance inputs. Port 0 can also be configured to be the multiplexed low order address/data bus during accesses to external program and data memory. In this mode, P0 has internal pullups. Port 0 also receives the code bytes during Flash programming and outputs the code bytes during program verification. External pullups are required during program verification.
- 12. Port 1 Port 1 is an 8-bit bidirectional I/O port with internal pullups. The Port 1 output buffers can sink/source four TTL inputs. When 1s are written to Port 1 pins, they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 1 pins that are externally being pulled low will source current (IIL) because of the internal pullups. In addition, P1.0 and P1.1 can be configured to be the timer/counter 2 external count input (P1.0/T2) and the timer/counter 2 trigger input (P1.1/T2EX), respectively, as shown in the following table. Port 1 also receives the low-order address bytes during Flash programming and verification. Port 2 Port 2 is an 8-bit bidirectional I/O port with internal pullups. The Port 2 output buffers can sink/source four TTL inputs. When 1s are written to Port 2 pins, they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 2 pins that are externally being pulled low will source current (IIL) because of the internal pullups. Port 2 emits the high-order address byte during fetches from external program memory and during accesses to external data memory that use 16-bit addresses (MOVX @ DPTR). In this application, Port 2 uses strong internal pullups when emitting 1s. During accesses to external data memory that use 8-bit addresses (MOVX @ RI), Port 2 emits the contents of the P2 Special Function Register. Port 2 also receives the high-order address bits and some control signals during Flash programming and verification. Port 3 Port 3 is an 8-bit bidirectional I/O port with internal pullups. The Port 3 output buffers can sink/source four TTL inputs. When 1s are written to Port 3 pins, they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 3 pins that are externally being pulled
- 13. low will source current (IIL) because of the pullups. Port 3 also serves the functions of various special features of the AT89S52, as shown in the following table. Port 3 also receives some control signals for Flash programming and verification. RST Reset input. A high on this pin for two machine cycles while the oscillator is running resets the device. This pin drives High for 96 oscillator periods after the Watchdog times out. The DISRTO bit in SFR AUXR (address 8EH) can be used to disable this feature. In the default state of bit DISRTO, the RESET HIGH out feature is enabled. ALE/PROG Address Latch Enable (ALE) is an output pulse for latching the low byte of the address during accesses to external memory. This pin is also the program pulse input (PROG) during Flash programming. In normal operation, ALE is emitted at a constant rate of 1/6 the oscillator frequency and may be used for external timing or clocking purposes. Note, however, that one ALE pulse is skipped during each access to external data memory. If desired, ALE operation can be disabled by setting bit 0 of SFR location 8EH. With the bit set, ALE is active only during a MOVX or MOVC instruction. Otherwise, the pin is weakly pulled high. Setting the ALE-disable bit has no effect if the microcontroller is in external execution mode. PSEN Program Store Enable (PSEN) is the read strobe to external program memory. When the AT89S52 is executing code from external program memory, PSEN is activated twice each machine cycle, except that two PSEN activations are skipped during each access to external data memory.
- 14. EA/VPP External Access Enable. EA must be strapped to GND in order to enable the device to fetch code from external program memory locations starting at 0000H up to FFFFH. Note, however, that if lock bit 1 is programmed, EA will be internally latched on reset. EA should be strapped to VCC for internal program executions. This pin also receives the 12-volt programming enable voltage (VPP) during Flash programming. XTAL1 Input to the inverting oscillator amplifier and input to the internal clock operating circuit. XTAL2 Output from the inverting oscillator amplifier. Table 1. AT89S52 SFR Map and Reset Values Special Function Registers A map of the on-chip memory area called the Special Function Register (SFR) space is shown in Table 1.
- 15. Note that not all of the addresses are occupied, and unoccupied addresses may not be implemented on the chip. Read accesses to these addresses will in general return random data, and write accesses will have an indeterminate effect. User software should not write 1s to these unlisted locations, since they may be used in future products to invoke new features. In that case, the reset or inactive values of the new bits will always be 0. Timer 2 Registers: Control and status bits are contained in registers T2CON (shown in Table 2) and T2MOD (shown in Table 3) for Timer 2. The register pair (RCAP2H, RCAP2L) are the Capture/Reload registers for Timer 2 in 16-bit capture mode or 16-bit auto-reload mode. Interrupt Registers: The individual interrupt enable bits are in the IE register. Two priorities can be set for each of the six interrupt sources in the IP register.
- 16. Dual Data Pointer Registers: To facilitate accessing both internal and external data memory, two banks of 16-bit Data Pointer Registers are provided: DP0 at SFR address locations 82H-83H and DP1 at 84H-85H. Bit DPS = 0 in SFR AUXR1 selects DP0 and DPS = 1 selects DP1. The user should always initialize the DPS bit to the appropriate value before accessing the respective Data Pointer Register. Power Off Flag: The Power Off Flag (POF) is located at bit 4 (PCON.4) in the PCON SFR. POF is set to “1” during power up. It can be set and rest under software control and is not affected by reset.
- 17. Memory Organization MCS-51 devices have a separate address space for Program and Data Memory. Up to 64K bytes each of external Program and Data Memory can be addressed. Program Memory If the EA pin is connected to GND, all program fetches are directed to external memory. On the AT89S52, if EA is connected to VCC, program fetches to addresses 0000H through 1FFFH are directed to internal memory and fetches to addresses 2000H through FFFFH are to external memory. Data Memory The AT89S52 implements 256 bytes of on-chip RAM. The upper 128 bytes occupy a parallel address space to the Special Function Registers. This means that the upper 128 bytes have the same addresses as the SFR space but are physically separate from SFR space. When an instruction accesses an internal location above address 7FH, the address mode used in the instruction specifies whether the CPU accesses the upper 128 bytes of RAM or the SFR space. Instructions which use direct addressing access of the SFR space. For example, the following direct addressing instruction accesses the SFR at location 0A0H (which is P2). MOV 0A0H, #data Instructions that use indirect addressing access the upper 128 bytes of RAM. For example, the following indirect addressing instruction, where R0 contains 0A0H, accesses the data byte at address 0A0H, rather than P2 (whose address is 0A0H). MOV @R0, #data Note that stack operations are examples of indirect addressing, so the upper 128 bytes of data RAM are available as stack space. Watchdog Timer (One-time Enabled with Reset-out) The WDT is intended as a recovery method in situations where the CPU may be subjected to software upsets. The WDT consists of a 13-bit counter and the Watchdog Timer Reset (WDTRST) SFR. The WDT is defaulted to disable from exiting reset. To enable the WDT, a user must write 01EH and 0E1H in sequence to the WDTRST register (SFR location 0A6H).
- 18. When the WDT is enabled, it will increment every machine cycle while the oscillator is running. The WDT timeout period is dependent on the external clock frequency. There is no way to disable the WDT except through reset (either hardware reset or WDT overflow reset). When WDT overflows, it will drive an output RESET HIGH pulse at the RST pin. Using the WDT To enable the WDT, a user must write 01EH and 0E1H in sequence to the WDTRST register (SFR location 0A6H). When the WDT is enabled, the user needs to service it by writing 01EH and 0E1H to WDTRST to avoid a WDT overflow. The 13-bit counter overflows when it reaches 8191 (1FFFH), and this will reset the device. When the WDT is enabled, it will increment every machine cycle while the oscillator is running. This means the user must reset the WDT at least every 8191 machine cycles. To reset the WDT the user must write 01EH and 0E1H to WDTRST. WDTRST is a write-only register. The WDT counter cannot be read or written. When WDT overflows, it will generate an output RESET pulse at the RST pin. The RESET pulse duration is 96xTOSC, where TOSC=1/FOSC. To make the best use of the WDT, it should be serviced in those sections of code that will periodically be executed within the time required to prevent a WDT reset. WDT During Power-down and Idle In Power-down mode the oscillator stops, which means the WDT also stops. While in Powerdown mode, the user does not need to service the WDT. There are two methods of exiting Power-down mode: by a hardware reset or via a level-activated external interrupt which is enabled prior to entering Power-down mode. When Power-down is exited with hardware reset, servicing the WDT should occur as it normally does whenever the AT89S52 is reset. Exiting Power-down with an interrupt is significantly different. The interrupt is held low long enough for the oscillator to stabilize. When the interrupt is brought high, the interrupt is serviced. To prevent the WDT from resetting the device while the interrupt pin is held low, the WDT is not started until the interrupt is pulled high. It is suggested that the WDT be reset during the interrupt service for the interrupt used to exit Power-down mode. To ensure that the WDT does not overflow within a few states of exiting Power-down, it is best to reset the WDT just before entering Power-down mode. Before going into the IDLE mode, the WDIDLE bit in SFR AUXR is used to determine whether the WDT continues to count if
- 19. enabled. The WDT keeps counting during IDLE (WDIDLE bit = 0) as the default state. To prevent the WDT from resetting the AT89S52 while in IDLE mode, the user should always set up a timer that will periodically exit IDLE, service the WDT, and reenter IDLE mode. With WDIDLE bit enabled, the WDT will stop to count in IDLE mode and resumes the count upon exit from IDLE. UART The UART in the AT89S52 operates the same way as the UART in the AT89C51 and AT89C52.. Timer 0 and 1 Timer 0 and Timer 1 in the AT89S52 operate the same way as Timer 0 and Timer 1 in the AT89C51 and AT89C52 Timer 2 Timer 2 is a 16-bit Timer/Counter that can operate as either a timer or an event counter. The type of operation is selected by bit C/T2 in the SFR T2CON (shown in Table 2). Timer 2 has three operating modes: capture, auto-reload (up or down counting), and baud rate generator. The modes are selected by bits in T2CON, as shown in Table 3. Timer 2 consists of two 8-bit registers, TH2 and TL2. In the Timer function, the TL2 register is incremented every machine cycle. Since a machine cycle consists of 12 oscillator periods, the count rate is 1/12 of the oscillator frequency. In the Counter function, the register is incremented in response to a 1-to-0 transition at its corresponding external input pin, T2. In this function, the external input is sampled during S5P2 of every machine cycle. When the samples show a high in one cycle and a low in the next cycle, the count is incremented. The new count value appears in the register during S3P1 of the cycle
- 20. following the one in which the transition was detected. Since two machine cycles (24 oscillator periods) are required to recognize a 1-to-0 transition, the maximum count rate is 1/24 of the oscillator frequency. To ensure that a given level is sampled at least once before it changes, the level should be held for at least one full machine cycle. Capture Mode In the capture mode, two options are selected by bit EXEN2 in T2CON. If EXEN2 = 0, Timer 2 is a 16-bit timer or counter which upon overflow sets bit TF2 in T2CON. This bit can then be used to generate an interrupt. If EXEN2 = 1, Timer 2 performs the same operation, but a 1- to-0 transition at external input T2EX also causes the current value in TH2 and TL2 to be captured into RCAP2H and RCAP2L, respectively. In addition, the transition at T2EX causes bit EXF2 in T2CON to be set. The EXF2 bit, like TF2, can generate an interrupt. The capture mode is illustrated in Figure 5. Auto-reload (Up or Down Counter) Timer 2 can be programmed to count up or down when configured in its 16-bit auto-reload mode. This feature is invoked by the DCEN (Down Counter Enable) bit located in the SFR T2MOD (see Table 4). Upon reset, the DCEN bit is set to 0 so that timer 2 will default to count up. When DCEN is set, Timer 2 can count up or down, depending on the value of the T2EX pin. Figure 6 shows Timer 2 automatically counting up when DCEN=0. In this mode, two options are selected by bit EXEN2 in T2CON. If EXEN2 = 0, Timer 2 counts up to 0FFFFH and then sets the TF2 bit upon overflow. The overflow also causes the timer registers to be reloaded with the
- 21. 16-bit value in RCAP2H and RCAP2L. The values in Timer in Capture ModeRCAP2H and RCAP2L are preset by software. If EXEN2 = 1, a 16-bit reload can be triggered either by an overflow or by a 1-to-0 transition at external input T2EX. This transition also sets the EXF2 bit. Both the TF2 and EXF2 bits can generate an interrupt if enabled. Setting the DCEN bit enables Timer 2 to count up or down, as shown in Figure 6. In this mode, the T2EX pin controls the direction of the count. A logic 1 at T2EX makes Timer 2 count up. The timer will overflow at 0FFFFH and set the TF2 bit. This overflow also causes the 16-bit value in RCAP2H and RCAP2L to be reloaded into the timer registers, TH2 and TL2, respectively. A logic 0 at T2EX makes Timer 2 count down. The timer underflows when TH2 and TL2 equal the values stored in RCAP2H and RCAP2L. The underflow sets the TF2 bit and causes 0FFFFH to be reloaded into the timer registers. The EXF2 bit toggles whenever Timer 2 overflows or underflows and can be used as a 17th bit of resolution. In this operating mode, EXF2 does not flag an interrupt.
- 22. Baud Rate Generator Timer 2 is selected as the baud rate generator by setting TCLK and/or RCLK in T2CON (Table 2). Note that the baud rates for transmit and receive can be different if Timer 2 is used for the receiver or transmitter and Timer 1 is used for the other function. Setting RCLK and/or TCLK puts Timer 2 into its baud rate generator mode, as shown in Figure 8. The baud rate generator mode is similar to the auto-reload
- 23. mode, in that a rollover in TH2 causes the Timer 2 registers to be reloaded with the 16-bit value in registers RCAP2H and RCAP2L, which are preset by software. The baud rates in Modes 1 and 3 are determined by Timer 2’s overflow rate according to the following equation. The Timer can be configured for either timer or counter operation. In most applications, it is configured for timer operation (CP/T2 = 0). The timer operation is different for Timer 2 when it is used as a baud rate generator. Normally, as a timer, it increments every machine cycle (at 1/12 the oscillator frequency). As a baud rate generator, however, it increments every state time (at 1/2 the oscillator frequency). The baud rate formula is given below. where (RCAP2H, RCAP2L) is the content of RCAP2H and RCAP2L taken as a 16-bit unsigned integer. Timer 2 as a baud rate generator is shown in Figure 8. This figure is valid only if RCLK or TCLK = 1 in T2CON. Note that a rollover in TH2 does not set TF2 and will not generate an interrupt. Note too, that if EXEN2 is set, a 1-to-0 transition in T2EX will set EXF2 but will not cause a reload from (RCAP2H, RCAP2L) to (TH2, TL2). Thus, when Timer 2 is in use as a baud rate generator, T2EX can be used as an extra external interrupt. Note that when Timer 2 is running (TR2 = 1) as a timer in the baud rate generator mode, TH2 or TL2 should not be read from or written to. Under these conditions, the Timer is incremented every state time, and the results of a read or write may not be accurate. The RCAP2 registers may be read but should not be written to, because a write might overlap a reload and cause write and/or reload errors. The timer should be turned off (clear TR2) before accessing the Timer 2 or RCAP2 registers.
- 24. Programmable Clock Out A 50% duty cycle clock can be programmed to come out on P1.0, as shown in Figure 9. This pin, besides being a regular I/O pin, has two alternate functions. It can be programmed to input the external clock for Timer/Counter 2 or to output a 50% duty cycle clock ranging from 61 Hz to 4 MHz at a 16 MHz operating frequency. To configure the Timer/Counter 2 as a clock generator, bit C/T2 (T2CON.1) must be cleared and bit T2OE (T2MOD.1) must be set. Bit TR2 (T2CON.2) starts and stops the timer. The clock-out frequency depends on the oscillator frequency and the reload value of Timer 2 capture registers (RCAP2H, RCAP2L), as shown in the following equation. In the clock-out mode, Timer 2 roll-overs will not generate an interrupt. This behavior is similar to when Timer 2 is used as a baud-rate generator. It is possible to use Timer 2 as a baud-rate generator and a clock generator simultaneously. Note, however, that the baud-rate and clock-out frequencies cannot be determined independently from one another since they both use RCAP2H and RCAP2L. Interrupts
- 25. The AT89S52 has a total of six interrupt vectors: two external interrupts (INT0 and INT1), three timer interrupts (Timers 0, 1, and 2), and the serial port interrupt. These interrupts are all shown in Figure 10. Each of these interrupt sources can be individually enabled or disabled by setting or clearing a bit in Special Function Register IE. IE also contains a global disable bit, EA, which disables all interrupts at once. Note that Table 5 shows that bit position IE.6 is unimplemented. In the AT89S52, bit position IE.5 is also unimplemented. User software should not write 1s to these bit positions, since they may be used in future AT89 products. Timer 2 interrupt is generated by the logical OR of bits TF2 and EXF2 in register T2CON. Neither of these flags is cleared by hardware when the service routine is vectored to. In fact, the service routine may have to determine whether it was TF2 or EXF2 that generated the interrupt, and that bit will have to be cleared in software. The Timer 0 and Timer 1 flags, TF0 and TF1, are set at S5P2 of the cycle in which the timers overflow. The values are then polled by the circuitry in the next cycle. However, the Timer 2 flag, TF2, is set at S2P2 and is polled in the same cycle in which the timer overflows.
- 26. Oscillator Characteristics XTAL1 and XTAL2 are the input and output, respectively, of an inverting amplifier that can be configured for use as an on-chip oscillator, as shown in Figure 11. Either a quartz crystal or ceramic resonator may be used. To drive the device from an external clock source, XTAL2 should be left unconnected while XTAL1 is driven, as shown in Figure 12. There are no requirements on the duty cycle of the external clock signal, since the input to the internal clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed. Idle Mode In idle mode, the CPU puts itself to sleep while all the onchip peripherals remain active. The mode is invoked by software. The content of the on-chip RAM and all the special functions registers remain unchanged during this mode. The idle mode can be terminated by any enabled interrupt or by a hardware reset. Note that when idle mode is terminated by a hardware reset, the device normally resumes program execution from where it left off, up to two machine cycles before the internal reset algorithm takes control. On-chip hardware inhibits access to internal RAM in this event, but access to the port pins is not inhibited. To eliminate the possibility of an unexpected write to a port pin when idle mode is terminated by a reset, the instruction following the one that invokes idle mode should not write to a port pin or to external memory. Power-down Mode
- 27. In the Power-down mode, the oscillator is stopped, and the instruction that invokes Power-down is the last instruction executed. The on-chip RAM and Special Function Registers retain their values until the Power-down mode is terminated. Exit from Power-down mode can be initiated either by a hardware reset or by an enabled external interrupt. Reset redefines the SFRs but does not change the on-chip RAM. The reset should not be activated before VCC is restored to its normal operating level and must be held active long enough to allow the oscillator to restart and stabilize. Figure 11. Oscillator Connections
- 28. Program Memory Lock Bits The AT89S52 has three lock bits that can be left unprogrammed (U) or can be programmed (P) to obtain the additional features listed in the following table. When lock bit 1 is programmed, the logic level at the EA pin is sampled and latched during reset. If the device is powered up without a reset, the latch initializes to a random value and holds that value until reset is activated. The latched value of EA must agree with the current logic level at that pin in order for the device to function properly. Programming the Flash – Parallel Mode The AT89S52 is shipped with the on-chip Flash memory array ready to be programmed. The programming interface needs a high-voltage (12-volt) program enable signal and is compatible with conventional third-party Flash or EPROM programmers. The AT89S52 code memory array is programmed byte-bybyte. Programming Algorithm: Before programming the AT89S52, the address, data, and control signals should be set up according to the Flash programming mode table and Figures 13 and 14. To program the AT89S52, take the following steps: 1. Input the desired memory location on the address lines. 2. Input the appropriate data byte on the data lines. 3. Activate the correct combination of control signals. 4. Raise EA/VPP to 12V.
- 29. 5. Pulse ALE/PROG once to program a byte in the Flash array or the lock bits. The byte-write cycle is self-timed and typically takes no more than 50 μs. Repeat steps 1 through 5, changing the address and data for the entire array or until the end of the object file is reached. Data Polling: The AT89S52 features Data Polling to indicate the end of a byte write cycle. During a write cycle, an attempted read of the last byte written will result in the complement of the written data on P0.7. Once the write cycle has been completed, true data is valid on all outputs, and the next cycle may begin. Data Polling may begin any time after a write cycle has been initiated. Ready/Busy: The progress of byte programming can also be monitored by the RDY/BSY output signal. P3.0 is pulled low after ALE goes high during programming to indicate BUSY. P3.0 is pulled high again when programming is done to indicate READY. Program Verify: If lock bits LB1 and LB2 have not been programmed, the programmed code data can be read back via the address and data lines for verification. The status of the individual lock bits can be verified directly by reading them back. Reading the Signature Bytes: The signature bytes are read by the same procedure as a normal verification of locations 000H, 100H, and 200H, except that P3.6 and P3.7 must be pulled to a logic low. The values returned are as follows. (000H) = 1EH indicates manufactured by Atmel (100H) = 52H indicates 89S52 (200H) = 06H Chip Erase: In the parallel programming mode, a chip erase operation is initiated by using the proper combination of control signals and by pulsing ALE/PROG low for a duration of 200 ns 500 ns. In the serial programming mode, a chip erase operation is initiated by issuing the Chip Erase instruction. In this mode, chip erase is self-timed and takes about 500 ms. During chip erase, a serial read from any address location will return 00H at the data output. Programming the Flash – Serial Mode The Code memory array can be programmed using the serial ISP interface while RST is pulled to VCC. The serial interface consists of pins SCK, MOSI (input) and MISO (output). After RST is
- 30. set high, the Programming Enable instruction needs to be executed first before other operations can be executed. Before a reprogramming sequence can occur, a Chip Erase operation is required. The Chip Erase operation turns the content of every memory location in the Code array into FFH. Either an external system clock can be supplied at pin XTAL1 or a crystal needs to be connected across pins XTAL1 and XTAL2. The maximum serial clock (SCK) frequency should be less than 1/16 of the crystal frequency. With a 33 MHz oscillator clock, the maximum SCK frequency is 2 MHz. Serial Programming Algorithm To program and verify the AT89S52 in the serial programming mode, the following sequence is recommended: 1. Power-up sequence: Apply power between VCC and GND pins. Set RST pin to “H”.If a crystal is not connected across pins XTAL1 and XTAL2, apply a 3 MHz to 33 MHz clock to XTAL1 pin and wait for at least 10 milliseconds. 2. Enable serial programming by sending the Programming Enable serial instruction to pin MOSI/P1.5. The frequency of the shift clock supplied at pin SCK/P1.7 needs to be less than the CPU clock at XTAL1 divided by 16. 3. The Code array is programmed one byte at a time by supplying the address and data together with the appropriate Write instruction. The write cycle is selftimed and typically takes less than 1 ms at 5V. 4. Any memory location can be verified by using the Read instruction which returns the content at the selected address at serial output MISO/P1.6. 5. At the end of a programming session, RST can be set low to commence normal device operation. Power-off sequence (if needed): Set XTAL1 to “L” (if a crystal is not used). Set RST to “L”. Turn VCC power off.
- 31. Data Polling: The Data Polling feature is also available in the serial mode. In this mode, during a write cycle an attempted read of the last byte written will result in the complement of the MSB of the serial output byte on MISO. Serial Programming Instruction Set The Instruction Set for Serial Programming follows a 4-byte protocol and is shown in Table 10. Programming Interface – Parallel Mode Every code byte in the Flash array can be programmed by using the appropriate combination of control signals. The write operation cycle is self-timed and once initiated, will automatically time itself to completion. All major programming vendors offer worldwide support for the Atmel microcontroller series. Please contact your local programming vendor for the appropriate software revision.
- 34. After Reset signal is high, SCK should be low for at least 64 system clocks before it goes high to clock in the enable data bytes. No pulsing of Reset signal is necessary. SCK should be no faster than 1/16 of the system clock at XTAL1. For Page Read/Write, the data always starts from byte 0 to 255. After the command byte and upper address byte are latched, each byte thereafter is treated as data until all 256 bytes are shifted in/out. Then the next instruction will be ready to be decoded.
- 35. MEMS: Introduction Micro-Electro-Mechanical Systems (MEMS) is the integration of mechanical elements, sensors, actuators, and electronics on a common silicon substrate through microfabrication technology. While the electronics are fabricated using integrated circuit (IC) process sequences (e.g., CMOS, Bipolar, or BICMOS processes), the micromechanical components are fabricated using compatible "micromachining" processes that selectively etch away parts of the silicon wafer or add new structural layers to form the mechanical and electromechanical devices.
- 36. MEMS promises to revolutionize nearly every product category by bringing together siliconbased microelectronics with micromachining technology, making possible the realization of complete systems-on-a-chip. MEMS is an enabling technology allowing the development of smart products, augmenting the computational ability of microelectronics with the perception and control capabilities of micro sensors and micro actuators and expanding the space of possible designs and applications. Microelectronic integrated circuits can be thought of as the "brains" of a system and MEMS augments this decision-making capability with "eyes" and "arms", to allow Microsystems to sense and control the environment. Sensors gather information from the environment through measuring mechanical, thermal, biological, chemical, optical, and magnetic phenomena. The electronics then process the information derived from the sensors and through some decision making capability direct the actuators to respond by moving, positioning, regulating, pumping, and filtering, thereby controlling the environment for some desired outcome or purpose. Because MEMS devices are manufactured using batch fabrication techniques similar to those used for integrated circuits, unprecedented levels of functionality, reliability, and sophistication can be placed on a small silicon chip at a relatively low cost. Microelectromechanical systems A mite less than 1 mm on a MEMS device. Microelectromechanical systems (MEMS) (also written as micro-electro-mechanical, or MicroElectroMechanical) is the technology of the very small, and merges at the nano-scale into
- 37. nanoelectromechanical systems (NEMS) and nanotechnology. MEMS are also referred to as micromachines (in Japan), or Micro Systems Technology - MST (in Europe). MEMS are separate and distinct from the hypothetical vision of molecular nanotechnology or molecular electronics. MEMS are made up of components between 1 to 100 micrometres in size (i.e. 0.001 to 0.1 mm) and MEMS devices generally range in size from 20 micrometres (20 millionths of a metre) to a millimetre. They usually consist of a central unit that processes data, the microprocessor and several components that interact with the outside such as microsensors[1]. At these size scales, the standard constructs of classical physics are not always useful. Due to MEMS' large surface area to volume ratio, surface effects such as electrostatics and wetting dominate volume effects such as inertia or thermal mass. The potential of very small machines was appreciated long before the technology existed that could make them—see, for example, Richard Feynman's famous 1959 lecture There's Plenty of Room at the Bottom. MEMS became practical once they could be fabricated using modified semiconductor device fabrication technologies, normally used to make electronics. These include molding and plating, wet etching (KOH, TMAH) and dry etching (RIE and DRIE), electro discharge machining (EDM), and other technologies capable of manufacturing very small devices. • MEMS description MEMS technology can be implemented using a number of different materials and manufacturing techniques; the choice of which will depend on the device being created and the market sector in which it has to operate.
- 38. Materials for MEMS Manufacturing Silicon Silicon is the material used to create most integrated circuits used in consumer electronics in the modern world. The economies of scale, ready availability of cheap high-quality materials and ability to incorporate electronic functionality make silicon attractive for a wide variety of MEMS applications. Silicon also has significant advantages engendered through its material properties. In single crystal form, silicon is an almost perfect Hookean material, meaning that when it is flexed there is virtually no hysteresis and hence almost no energy dissipation. As well as making for highly repeatable motion, this also makes silicon very reliable as it suffers very little fatigue and can have service lifetimes in the range of billions to trillions of cycles without breaking. The basic techniques for producing all silicon based MEMS devices are deposition of material layers, patterning of these layers by photolithography and then etching to produce the required shapes. Polymers Even though the electronics industry provides an economy of scale for the silicon industry, crystalline silicon is still a complex and relatively expensive material to produce. Polymers on the other hand can be produced in huge volumes, with a great variety of material characteristics. MEMS devices can be made from polymers by processes such as injection molding, embossing or stereolithography and are especially well suited to microfluidic applications such as disposable blood testing cartridges. Metals Metals can also be used to create MEMS elements. While metals do not have some of the advantages displayed by silicon in terms of mechanical properties, when used within their limitations, metals can exhibit very high degrees of reliability. Metals can be deposited by electroplating, evaporation, and sputtering processes. Commonly used metals include gold, nickel, aluminium, chromium, titanium, tungsten, platinum, and silver.
- 39. MEMS Basic Processes This chart is not complete: Basic Process Deposition Patterning Etching Deposition processes One of the basic building blocks in MEMS processing is the ability to deposit thin films of material with a thickness anywhere between a few nanometres to about 100 micrometres. Physical Deposition There is a type of physical deposition. Physical Vapor Deposition (PVD) Sputtering Evaporation Chemical Deposition There are 2 types of chemical deposition. Chemical Vapor Deposition LPCVD : Low Pressure CVD PECVD : Plasma Enhanced CVD Thermal Oxidation
- 40. Patterning Patterning in MEMS is the transfer of a pattern into a material. Lithography Lithography in MEMS context is typically the transfer of a pattern into a photosensitive material by selective exposure to a radiation source such as light. A photosensitive material is a material that experiences a change in its physical properties when exposed to a radiation source. If a photosensitive material is selectively exposed to radiation (e.g. by masking some of the radiation) the pattern of the radiation on the material is transferred to the material exposed, as the properties of the exposed and unexposed regions differs. This exposed region can then be removed or treated providing a mask for the underlying substrate. Photolithography is typically used with metal or other thin film deposition, wet and dry etching. Photolithography Electron Beam Lithography Ion Beam Lithography X-ray Lithography Diamond Patterning Etching processes There are two basic categories of etching processes: wet and dry etching. In the former, the material is dissolved when immersed in a chemical solution. In the latter, the material is sputtered or dissolved using reactive ions or a vapor phase etchant. See Williams and Muller [2] or Kovacs, Maluf and Peterson[3] for a somewhat dated overview of MEMS etching technologies. 1. Wet etching
- 41. Main article: Wet etching Wet chemical etching consists in a selective removal of material by dipping a substrate into a solution that can dissolve it. Due to the chemical nature of this etching process, a good selectivity can often be obtained, which means that the etching rate of the target material is considerably higher than that of the mask material if selected carefully. 2. Isotropic etching Etching progresses at the same speed in all directions. Long and narrow holes in a mask will produce v-shaped grooves in the silicon. The surface of these grooves can be atomically smooth if the etch is carried out correctly, with dimensions and angles being extremely accurate. 3. Anisotropic etching Some single crystal materials, such as silicon, will have different etching rates depending on the crystallographic orientation of the substrate. This is known as anisotropic etching and one of the most common examples is the etching of silicon in KOH (potassium hydroxide), where Si <111> planes etch approximately 100 times slower than other planes (crystallographic orientations). Therefore, etching a rectangular hole in a (100)-Si wafer will result in a pyramid shaped etch pit with 54.7° walls, instead of a hole with curved sidewalls as it would be the case for isotropic etching. 4. Electrochemical etching Electrochemical etching (ECE) for dopant-selective removal of silicon is a common method to automate and to selectively control etching. An active p-n diode junction is required, and either type of dopant can be the etch-resistant ("etch-stop") material. Boron is the most common etchstop dopant. In combination with wet anisotropic etching as described above, ECE has been used successfully for controlling silicon diaphragm thickness in commercial piezoresistive silicon pressure sensors. Selectively doped regions can be created either by implantation, diffusion, or epitaxial deposition of silicon. 5. Xenon difluoride etching
- 42. Xenon difluoride (XeF2) is a dry vapor phase isotropic etch for silicon originally applied for MEMS in 1995 at University of California, Los Angeles [4][5]. Primarily used for releasing metal and dielectric structures by undercutting silicon, XeF2 has the advantage of a stiction-free release unlike wet etchants. Its etch selectivity to silicon is very high, allowing it to work with photo resist, SiO2, silicon nitride, and various metals for masking. Its reaction to silicon is "plasma less", is purely chemical and spontaneous and is often operated in pulsed mode. Models of the etching action are available[6], and university laboratories and various commercial tools offer solutions using this approach. 6.HF Etching Hydrofluoric acid is commonly used as an aqueous etchant for silicon dioxide (SiO2, aka BOX for SOI). HF are usually in 49% concentrated form, 5:1, 10:1 or 20:1 BOE (Buffered Oxide Etchant) or BHF (Buffered HF). They were first used in medieval times for glass etching. It was used in IC fabrication for patterning the gate oxide until the process step was replaced by RIE. HF is considered one of the more dangerous acids in the clean room. It penetrates the skin upon contact and it diffuses straight to the bone. Therefore the damage will not be felt until it is too late. 7. Reactive ion etching (RIE) Main article: Reactive ion etching In reactive ion etching (RIE), the substrate is placed inside a reactor in which several gases are introduced. A plasma is struck in the gas mixture using an RF power source, breaking the gas molecules into ions. The ions are accelerated towards, and react with, the surface of the material being etched, forming another gaseous material. This is known as the chemical part of reactive ion etching. There is also a physical part which is similar in nature to the sputtering deposition process. If the ions have high enough energy, they can knock atoms out of the material to be etched without a chemical reaction. It is a very complex task to develop dry etches processes that
- 43. balance chemical and physical etching, since there are many parameters to adjust. By changing the balance it is possible to influence the anisotropy of the etching, since the chemical part is isotropic and the physical part highly anisotropic the combination can form sidewalls that have shapes from rounded to vertical. RIE can be deep and its name will be Deep RIE or DRIE Deep reactive ion etching (DRIE) Main article: Deep reactive ion etching A special subclass of RIE which continues to grow rapidly in popularity is deep RIE (DRIE). In this process, etch depths of hundreds of micrometres can be achieved with almost vertical sidewalls. The primary technology is based on the so-called "Bosch process" [7], named after the German company Robert Bosch which filed the original patent, where two different gas compositions are alternated in the reactor. Currently there are two variations of the DRIE. The first variation consists of three distinct steps (the Bosch Process as used in the UNAXIS tool) while the second variation only consists of two steps (ASE used in the STS tool). In the 1st Variation, the etch cycle is as follows: (i) SF 6 isotropic etch; (ii) C4F8 passivation; (iii) SF6 anisoptropic etch for floor cleaning. In the 2nd variation, steps (i) and (iii) are combined. Both variations operate similarly. The C4F8 creates a polymer on the surface of the substrate, and the second gas composition (SF6 and O2) etches the substrate. The polymer is immediately sputtered away by the physical part of the etching, but only on the horizontal surfaces and not the sidewalls. Since the polymer only dissolves very slowly in the chemical part of the etching, it builds up on the sidewalls and protects them from etching. As a result, etching aspect ratios of 50 to 1 can be achieved. The process can easily be used to etch completely through a silicon substrate, and etch rates are 3-6 times higher than wet etching. 8. Dry Etching 9. Vapor Etching 10. Plasma Etching 11. Sputtering
- 44. Fabrication Technologies The three characteristic features of MEMS fabrication technologies are miniaturization, multiplicity, and microelectronics. Miniaturization enables the production of compact, quickresponse devices. Multiplicity refers to the batch fabrication inherent in semiconductor processing, which allows thousands or millions of components to be easily and concurrently fabricated. Microelectronics provides the intelligence to MEMS and allows the monolithic merger of sensors, actuators, and logic to build closed-loop feedback components and systems. The successful miniaturization and multiplicity of traditional electronics systems would not have been possible without IC fabrication technology. Therefore, IC fabrication technology, or microfabrication, has so far been the primary enabling technology for the development of MEMS. Microfabrication provides a powerful tool for batch processing and miniaturization of mechanical systems into a dimensional domain not accessible by conventional (machining) techniques. Furthermore, microfabrication provides an opportunity for integration of mechanical systems with electronics to develop high-performance closed-loop-controlled MEMS. Advances in IC technology in the last decade have brought about corresponding progress in MEMS fabrication processes. Manufacturing processes allow for the monolithic integration of microelectromechanical structures with driving, controlling, and signal-processing electronics. This integration promises to improve the performance of micromechanical devices as well as reduce the cost of manufacturing, packaging, and instrumenting these devices . A. IC Fabrication Any discussion of MEMS requires a basic understanding of IC fabrication technology, or microfabrication, the primary enabling technology for the development of MEMS. The major steps in IC fabrication technology are film growth, doping, lithography, etching, dicing, and packaging. Film growth: Usually, a polished Si wafer is used as the substrate, on which a thin film is grown. The film, which may be epitaxial Si, SiO2, silicon nitride (Si3N4), polycrystalline Si (polysilicon), or metal, is used to build both active or passive components and interconnections between circuits.
- 45. Doping: To modulate the properties of the device layer, a low and controllable level of an atomic impurity may be introduced into the layer by thermal diffusion or ion implantation. Lithography: A pattern on a mask is then transferred to the film by means of a photosensitive (i.e., light sensitive) chemical known as a photoresist. The process of pattern generation and transfer is called photolithography. A typical mask consists of a glass plate coated with a patterned chromium (Cr) film. Etching: Next is the selective removal of unwanted regions of a film or substrate for pattern delineation. Wet chemical etching or dry etching may be used. Etch-mask materials are used at various stages in the removal process to selectively prevent those portions of the material from being etched. These materials include SiO2, Si3N4, and hard-baked photoresist. Dicing: The finished wafer is sawed or machined into small squares, or dice, from which electronic components can be made. Packaging: The individual sections are then packaged, a process that involves physically locating, connecting, and protecting a device or component. MEMS design is strongly coupled to the packaging requirements, which in turn are dictated by the application environment. B. Bulk Micromachining and Wafer Bonding Bulk micromachining is an extension of IC technology for the fabrication of 3D structures. Bulk micromachining of Si uses wet- and dry-etching techniques in conjunction with etch masks and etch stops to sculpt micromechanical devices from the Si substrate. The two key capabilities that make bulk micromachining a viable technology are: 1) Anisotropic etchants of Si, such as ethylene-diamine and pyrocatechol (EDP), potassium hydroxide (KOH), and hydrazine (N2H4). These preferentially etch single crystal Si along given crystal planes. 2) Etch masks and etch-stop techniques that can be used with Si anisotropic etchants to selectively prevent regions of Si from being etched. Good etch masks are provided by SiO2 and Si3N4, and some metallic thin films such as Cr and Au (gold).
- 46. A drawback of wet anisotropic etching is that the microstructure geometry is defined by the internal crystalline structure of the substrate. Consequently, fabricating multiple, interconnected micromechanical structures of free-form geometry is often difficult or impossible. Two additional processing techniques have extended the range of traditional bulk micromachining technology: deep anisotropic dry etching and wafer bonding. Reactive gas plasmas can perform deep anisotropic dry etching of Si wafers, up to a depth of a few hundred microns, while maintaining smooth vertical sidewall profiles. The other technology, wafer bonding, permits a Si substrate to be attached to another substrate, typically Si or glass. Used in combination, anisotropic etching and wafer bonding techniques can construct 3D complex microstructures such as microvalves and micropumps . C. Surface Micromachining Surface micromachining enables the fabrication of complex multicomponent integrated micromechanical structures that would not be possible with traditional bulk micromachining. This technique encases specific structural parts of a device in layers of a sacrificial material during the fabrication process. The substrate wafer is used primarily as a mechanical support on which multiple alternating layers of structural and sacrificial material are deposited and patterned to realize micromechanical structures. The sacrificial material is then dissolved in a chemical etchant that does not attack the structural parts. The most widely used surface micromachining technique, polysilicon surface micromachining, uses SiO2 as the sacrificial material and polysilicon as the structural material. At the University of Wisconsin at Madison, polysilicon surface micromachining research started in the early 1980s in an effort to create high-precision micro pressure sensors. The control of the internal stresses of a thin film is important for the fabrication of microelectromechanical structures. The microelectronic fabrication industry typically grows polysilicon, silicon nitride, and silicon dioxide films using recipes that minimize time. Unfortunately, a deposition process that is optimized to speed does not always create a low internal stress film. In fact, most of these films have internal stresses that are highly compressive (tending to contract). A freestanding plate of highly compressive polysilicon that is held at all its edges will buckle (i.e., collapse or
- 47. give way). This is highly undesirable. The solution is to modify the film deposition process to control the internal stress by making it stress-free or slightly tensile. One way to do this is to dope the film with boron, phosphorus, or arsenic. However, a doped polysilicon film is conductive, and this property may interfere with the mechanical devices incorporated electronics. Another problem with doped polysilicon is that it is roughened by hydrofluoric acid (HF), which is commonly used to free sections of the final mechanical device from the substrate. Rough polysilicon has different mechanical properties than smooth polysilicon. Therefore, the amount of roughening must be taken into account when designing the mechanical parts of the micro device. A better way to control the stress in polysilicon is through post annealing, which involves the deposition of pure, fine-grained, compressive (i.e., can be compressed) polysilicon. Annealing the polysilicon after deposition at elevated temperatures can change the film to be stress-free or tensile. The annealing temperature sets the film's final stress. After this, electronics can then be incorporated into polysilicon films through selective doping, and hydrofluoric acid will not change the mechanical properties of the material [16]. Deposition temperature and the film's silicon to nitride ratio can control the stress of a silicon nitride (Si3N4) film. The films can be deposited in compression, stress-free, or in tension [6]. Deposition temperature and post annealing can control silicon dioxide (SiO2) film stress. Because it is difficult to control the stress of SiO2 accurately, SiO2 is typically not used as a mechanical material by itself, but as electronic isolation or as a sacrificial layer under polysilicon. D. Micromolding In the micromolding process, microstructures are fabricated using molds to define the deposition of the structural layer. The structural material is deposited only in those areas constituting the microdevice structure, in contrast to bulk and surface micromachining, which feature blanket deposition of the structural material followed by etching to realize the final device geometry. After the structural layer deposition, the mold is dissolved in a chemical etchant that does not
- 48. attack the structural material. One of the most prominent micromolding processes is the LIGA process. LIGA is a German acronym standing for lithographie, galvanoformung, und abformung (lithography, electroplating, and molding). This process can be used for the manufacture of highaspect-ratio 3D microstructures in a wide variety of materials, such as metals, polymers, ceramics, and glasses. Photosensitive polyimides are also used for fabricating plating molds. The photolithography process is similar to conventional photolithography, except that polyimide works as a negative resist Applications microelectromechanical systems chip, sometimes called "lab on a chip" In one viewpoint MEMS application is categorized by type of use. • Sensor • Actuator • Structure In another view point mems applications are categorized by the field of application(Commercial applications include): • Inkjet printers, which use piezoelectrics or thermal bubble ejection to deposit ink on paper. • Accelerometers in modern cars for a large number of purposes including airbag deployment in collisions. • Accelerometers in consumer electronics devices such as game controllers (Nintendo Wii), personal media players / cell phones (Apple iPhone, various Nokia mobile phone models, various HTC PDA models)[9] and a number of Digital Cameras (various Canon
- 49. Digital IXUS models). Also used in PCs to park the hard disk head when free-fall is detected, to prevent damage and data loss. • MEMS gyroscopes used in modern cars and other applications to detect yaw; e.g. to deploy a roll over bar or trigger dynamic stability control. • Silicon pressure sensors e.g. car tire pressure sensors, and disposable blood pressure sensors. • Displays e.g. the DMD chip in a projector based on DLP technology has on its surface several hundred thousand micromirrors. • Optical switching technology which is used for switching technology and alignment for data communications. • Bio-MEMS applications in medical and health related technologies from Lab-On-Chip to MicroTotalAnalysis (biosensor, chemosensor). • Interferometric modulator display (IMOD) applications in consumer electronics (primarily displays for mobile devices). Used to create interferometric modulation reflective display technology as found in mirasol displays. Companies with strong MEMS programs come in many sizes. The larger firms specialize in manufacturing high volume inexpensive components or packaged solutions for end markets such as automobiles, biomedical, and electronics. The successful small firms provide value in innovative solutions and absorb the expense of custom fabrication with high sales margins. In addition, both large and small companies work in R&D to explore MEMS technology. . Mems accelerometer: WHAT IS AN ACCELEROMETER? An accelerometer is an instrument for measuring acceleration, detecting and measuring vibrations, or for measuring acceleration due to gravity (inclination). Accelerometers can be used to measure vibration on vehicles, machines, buildings, process control systems and safety installations. They can also be used to measure seismic activity, inclination, machine vibration, dynamic distance and speed with or without the influence of gravity.
- 50. HOW DOES AN ACCELEROMETER WORK? Used for calculating acceleration and measuring vibrations, the accelerometer is capable of detecting even the slightest movements, from the tilting of a building to smallest vibration caused by a musical instrument. Inside the accelerometer sensor minute structures are present that produces electrical charges if the sensor experiences any movement. Accelerometers need to be placed on the surface of the object in order to determine the vibrations. It is not capable of work in isolation or apart from the object it is required to assess, it must be firmly attached to the object in order to give precise readings. KINDS OF ACCELEROMETER The two kinds of basic accelerometers are: 1. ANALOG ACCELEROMETER At times Inputs and output readings also matter especially when it comes to determining the kind of accelerometer that needs to be placed on a certain object. If the output is digital then a digital accelerometer must be placed and vice versa. The main feature of this accelerometer is that the output tends to change when there is even a slight change in the input. The most common type of this accelerometer is used in airbags of automobiles, to note the sudden drop in the speed of the vehicle and to trigger the airbag release. Even laptops are now being equipped with accelerometers in order to protect the hard drive against any physical dangers, caused mainly due to accidental drops. 2. DIGITAL ACCELEROMETER The digital accelerometer is more sophisticated than the analog. Here the amount of high voltage time is proportional to the acceleration. One of its major advantages is that it is more stable and produces a direct output signal. Accelerometers are now also used in aerospace and many military applications, such as missile launch, weapon fire system, rocket deployment etc. Many a times these accelerometers are used to protect fragile equipment during cargo transportation, and report any strain that might cause a possible damage. Some companies have also managed to develop a wireless 3-axis accelerometers which are not only low in cost but are also shock
- 51. durable. This 3-axis accelerometer has sensors that are used to protect mobiles and music players. Also these sensors are used in some of the devices used for traffic navigation and control. PIEZOELECTRIC SENSOR Depending upon the kind of work, the accelerometers vary in the way they are prepared and how they work. Some accelerometers use piezoelectricity, these are man-made. In such accelerometers the acceleration is calculated based upon the charges derived from the microscopic crystalline structures when they are accelerated due to motion. MEMS ACCELEROMETER Another kind works with the capacitance and the changes initiated within it as a result of some accelerative force. This technology is used from automotive industry to agriculture industry and from NASA to military researches and operations. STRAIN GAUGE This device is used to measure strain in an object, which is detected by a foil strain element. If the object, to which the gauge is attached is some how deformed that creates electrical charges and is known as the gauge factor. ACCELEROMETER IS USED IN: AUTOMOTIVE INDUSTRY Due to high demand and wide spread use of accelerometers in the automotive industry and new hi-tech technology, these sensors are now light weight and are available at low cost and reduced prices. MICROPHONES Microphones also carry accelerometers. That is how they are able to detect the minute frequencies.
- 52. ROBOTICS The forces that can cause vibrations which are detected by the accelerometer can be static, dynamic or gravitational. Certain accelerometers are rated G. G stands for Gravity. Such accelerometers are used mostly in robotics. They are more sensitive to motion and can be triggered at the slightest changes in gravitational pulls. Accelerometers Accelerometers are acceleration sensors. An inertial mass suspended by springs is acted upon by acceleration forces that cause the mass to be deflected from its initial position. This deflection is converted to an electrical signal, which appears at the sensor output. The application of MEMS technology to accelerometers is a relatively new development. One such accelerometer design is discussed by DeVoe and Pisano (2001) [8]. It is a surface micromachined piezoelectric accelerometer employing a zinc oxide (ZnO) active piezoelectric film. The design is a simple cantilever structure, in which the cantilever beam serves simultaneously as proof mass and sensing element. One of the fabrication approaches developed is a sacrificial oxide process based on polysilicon surface micromachining, with the addition of a piezoelectric layer atop the polysilicon film. In the sacrificial oxide process, a passivation layer of silicon dioxide and low-stress silicon nitride is deposited on a bare silicon wafer, followed by 0.5 micron of liquid phase chemical vapor deposited (LPCVD) phosphorous-doped polysilicon. Then, a 2.0-micron layer of phosphosilicate glass (PSG) is deposited by LPCVD and patterned to define regions where the accelerometer structure will be anchored to the substrate. The PSG film acts as a sacrificial layer that is selectively etched at the end to free the mechanical structures. A second layer of 2.0-micron-thick phosphorus-doped polysilicon is deposited via LPCVD on top of the PSG, and patterned by plasma etching to define the mechanical accelerometer structure. This layer also acts as the lower electrode for the sensing film. A thin layer of silicon nitride is next deposited by LPCVD, and acts as a stress-compensation layer for balancing the highly compressive residual stresses in the ZnO film. By varying the thickness of the Si3N4 layer, the accelerometer structure may be tuned to control bending effects resulting from the stress gradient through the device thickness. A ZnO layer is then deposited on the order of 0.5 micron, followed
- 53. by sputtering of a 0.2-micron layer of platinum (Pt) deposited to form the upper electrode. A rapid thermal anneal is performed to reduce residual stresses in the sensing film. Afterwards, the Pt, Si3N4, and ZnO layers are patterned in a single ion milling etch step, and the devices are then released by passivating the ZnO film with photoresist, and immersing the wafer in buffered hydrofluoric acid, which removes the sacrificial PSG layer . APR 9600 RE-Recording Voice IC Single-chip Voice Recording & Playback Device 60- Second Duration 1 Features : • Single-chip, high-quality voice recording & playback solution - No external ICs required - Minimum external components • Non-volatile Flash memory technology - No battery backup required • User-Selectable messaging options - Random access of multiple fixed-duration messages - Sequential access of multiple variable-duration messages • User-friendly, easy-to-use operation - Programming & development systems not required - Level-activated recording & edge-activated play back switches • Low power consumption - Operating current: 25 mA typical - Standby current: 1 uA typical - Automatic power-down • Chip Enable pin for simple message expansion 2 General Description:
- 54. The APR9600 device offers true single-chip voice recording, non-volatile storage, and playback capability for 40 to 60 seconds. The device supports both random and sequential access of multiple messages. Sample rates are user- selectable, allowing designers to customize their design for unique quality and storage time needs. Integrated output amplifier, microphone amplifier, and AGC circuits greatly simplify system design. the device is ideal for use in portable voice recorders, toys, and many other consumer and industrial applications. APLUS integrated achieves these high levels of storage capability by using its proprietary analog/multilevel storage technology implemented in an advanced Flash non-volatile memory process, where each memory cell can store 256 voltage levels. This technology enables the APR9600 device to reproduce voice signals in their natural form. It eliminates the need for encoding and compression, which often introduce distortion. Fig 12: The APR9600 DIP & SOP 3 Functional Description: APR9600 block diagram is included in order to describe the device's internal architecture. At the left hand side of the diagram are the analog inputs. A differential microphone amplifier,
- 55. including integrated AGC, is included on-chip for applications requiring use. The amplified microphone signals fed into the device by connecting the ANA_OUT pin to the ANA_IN pin through an external DC blocking capacitor. Recording can be fed directly into the ANA_IN pin through a DC blocking capacitor, however, the connection between ANA_IN andANA OUT is still required for playback. The next block encountered by the input signal is the internal antialiasing filter. The filter automatically adjusts its response According to the sampling frequency selected so Shannon’s Sampling Theorem is satisfied. After anti-aliasing filtering is accomplished the signal is ready to be clocked into the memory array. This storage is accomplished through a combination of the Sample and Hold circuit and the Analog Write/Read circuit. Either the Internal Oscillator or an external clock source clocks these circuits. When playback is desired the previously stored recording is retrieved from memory, low pass filtered, and amplified as shown on the right hand side of the diagram. The signal can be heard by connecting a speaker to the SP+ and SP- pins. Chip-wide management is accomplished through the device control block shown in the upper right hand corner. Message management is provided through the message control block represented in the lower center of the block diagram. More detail on actual device application can be found in the Sample Application section. More detail on sampling control can be found in the Sample Rate and Voice Quality section. More detail on Message management and device control can be found in the Message Management section.
- 56. Fig 13: APR9600 Block Diagram 3.1 Message Management: 3.1.1 Message Management General Description Playback and record operations are managed by on-chip circuitry. There are several available messaging modes depending upon desired operation. These message modes determine message management style, message length, and external parts count. Therefore, the designer must select the appropriate operating mode before beginning the design. Operating modes do not affect voice quality; for information on factors affecting quality refer to the Sampling Rate & Voice Quality section. The device supports five message management modes (defined by the MSEL1, MSEL2 and /M8_OPTION pins shown in Figures 1 and 2): Random access mode with 2, 4, or 8 fixed-duration messages Tape mode, with multiple variableduration messages, provides two options: - Auto rewind - Normal Modes cannot be mixed. Switching of modes after the device has recorded an initial message is not recommended. If modes are switched after an initial recording has been made some unpredictable message fragments from the previous mode may remain present, and be audible on playback, in the new mode. These fragments will disappear after a Record operation in the newly selected mode. Table 1 defines the decoding necessary to choose the desired mode. An important feature of the APR9600 Message management capabilities is the ability to audibly prompt the user to change in the device's status through the use of "beeps" superimposed on the device's output. This feature is enabled by asserting a logic high level on the BE pin.
- 57. 3.1.2 Random Access Mode Random access mode supports 2, 4, or 8 Message segments of fixed duration. As suggested recording or playback can be made randomly in any of the elected messages. The length of each message segment is the total recording length available (as defined by the selected sampling rate) divided by the total number of segments enabled (as decoded in Table1). Random access mode provides easy indexing to message segments. 3.1.2A Functional Description of Recording in Random Access Mode On power up, the device is ready to record or playback in any of the enabled message segments. To record,/CE must be set low to enable the device and /RE must be set low to enable recording. You initiate recording by applying a low level on the message trigger pin that represents the message segment you intend to use. The message trigger pins are labeled /M1_MESSAGE /M8_OPTION on pins 1-9 (excluding pin 7) for message segments 1-8 respectively. Note: Message trigger pins of M1_MESSAGE,/M2_NEXT, /M7_END, and /M8_OPTION, have expanded names to represent the different functionality that these pins assume in the other modes. In random access mode these pins should be considered purely message trigger pins with the same functionality as /M3, /M4, /M5, and /M6. For a more thorough explanation of the functionality of device pins in different modes please refer to the pin description table that appears later in this document. When actual recording begins the device responds with a single beep (if the BE pin is high to enable the beep tone) at the speaker outputs to indicate that it has started recording. Recording continues as long as the message pin stays low. The rising edge of the same message trigger pin during record stops the recording operation (indicated with a single beep). If the message trigger pin is held low beyond the end of the maximum allocated duration, recording stops automatically (indicated with two beeps), regardless of the state of the message trigger pin. The chip then enters low-power mode until the message trigger pin returns high. After the message trigger pin returns to high, the chip enters standby mode. Any subsequent high
- 58. to low transition on the same message trigger pin will initiate recording from the beginning of the same message segment. The entire previous message is then overwritten by the new message, regardless of the duration of the new message. Transitions on any other message trigger pin or the /RE pin during the record operation are ignored until after the device enters standby mode. 3.1.2B Functional Description of Playback Random Access Mode On power up, the device is ready to record or playback, in any of the enabled message segments. To playback,/CE must be set low to enable the device and /RE must be set high to disable recording & enable playback. You initiate playback by applying a high to low edge on the message trigger pin that represents the message segment you intend to playback. Playback will continue until the end of the message is reached. If a high to low edge occurs on the same message trigger pin during playback, playback of the current message stops immediately. If a different message trigger pin pulses during playback, playback of the current message stops immediately (indicated by one beep) and playback of the new message segment begins. A delay equal to 8,400 cycles of he sample clock will be encountered before the device starts playing the new message. If a message trigger pin is held low, the selected message is played back repeatedly as long as the trigger pin stays low. A period of silence, of a duration equal to 8,400 cycles of the sampling clock, will be inserted during looping as an indicator to the user of the transition between the end and the beginning of the message. 3.1.3 Tape Mode: Tape mode manages messages sequentially much like traditional cassette tape recorders. Within tape mode two options exist, auto rewind and normal. Auto rewind mode configures the device to automatically rewind to the beginning of the message immediately following recording or playback of the message. In tape mode, using either option, messages must be recorded or played back sequentially, much like a traditional cassette tape recorder. 3.1.3.1A Function Description of Recording in Tape Mode using the Auto Rewind Option On power up, the device is ready to record or playback, starting at the first address in the memory array. To record, /CE must be set low to enable the device and /RE must be set low to enable recording. A falling edge of the /M1_MESSAGE pin initiates voice recording (indicated by one beep).A subsequent rising edge of the /M1_MESSAGE pin during recording stops the recording (also indicated by one beep). If the M1_MESSAGE pin is held low beyond the end of
- 59. the available memory, recording will stop automatically (indicated by two beeps). The device will then assert a logic low on the /M7_END pin until the /M1 Message pin is released. The device returns to standby mode when the /M1_MESSAGE pin goes high gain. After recording is finished the device will automatically rewind to the beginning of the most recently recorded message and wait for the next user input. The auto rewind function is convenient because it allows the user to immediately playback and review the message without the need to rewind. However, caution must be practiced because a subsequent record operation will overwrite the last recorded message unless the user remembers to pulse the /M2_Next pin in order to increment the device past the current message. A subsequent falling edge on the /M1_Message pin starts a new record operation, overwriting the previously existing message. You can preserve the previously recorded message by using the /M2_Next input to advance to the next available message segment. To perform this function, the /M2_NEXT pin must be pulled low for at least 400 cycles of the sample clock. The auto rewind mode allows the user to record over the just recorded message simply by initiating a record sequence without first toggling the /M2_NEXT pin. To record over any other message however requires a different sequence. You must pulse the /CE pin low once to rewind the device to the beginning of the voice memory. The /M2_NEXT pin must then be pulsed low for the specified number of times to move to the start of the message you wish to overwrite. Upon arriving at the desired message a record sequence can be initiated to overwrite the previously recorded material. After you overwrite the message it becomes the last available message and all previously recorded messages following this message become inaccessible. If during a record operation all of the available memory is used, the device will stop recording automatically,(double beep) and set the /M7_END pin low for a duration equal to 1600 cycles of the sample clock. Playback can be initiated on this last message, but pulsing the /M2_Next pin will put the device into an "overflow state". Once the device enters an overflow state any subsequent pulsing of /M1_MESSAGE or /M2_NEXT will only result in a double beep and setting of the /M7_END pin low for a duration equal to 400 cycles of the sample clock. To proceed from this state the user must rewind the device to the beginning of the memory array. This can be accomplished by toggling the /CE pin low or cycling power. All inputs, except the /CE pin, are ignored during recording.
- 60. 3.1.3.1B Function Description of Playback in Tape Mode using Auto Rewind Option On power-up, the device is ready to record or playback, starting at the first address in the memory array. Before you can begin playback, the /CE input must be set to low to enable the device and /RE must be set to high to disable recording and enable playback. The first high to low going pulse of the /M1_MESSAGE pin initiates playback from the beginning of the current message; on power up the first message is the current message. When the /M1_MESSAGE pin pulses low the second time, playback of the current Message stops immediately. When the /M1_MESSAGE pin pulses low a third time, playback of the current message starts again from its beginning. If you hold the /M1_MESSAGE pin low continuously the same message will play continuously in a looping fashion. A 1,540ms period of silence is inserted during looping as an indicator to the user of the transition between the beginning and end of the message. Note that in auto rewind mode the device always rewinds to the beginning of the current message. To listen to a subsequent message the device must be fast forwarded past the current message to the next message. This function is accomplished by toggling the /M2_NEXT pin from high to low. The pulse must be low for least 400 cycles of the sampling clock. After the device is incremented to the desired message the user can initiate playback of the message with the playback sequence described above. A special case exists when the /M2_NEXT pin goes low during playback. Playback of the current message will stop, the device will beep, advance to the next message and initiate playback of the next message. (Note that if /M2 Next goes low when not in playback mode, the device will prepare to play the next message, but will not actually initiate playback). If the /CE pin goes high during playback, playback of the current message will stop, the device will beep, reset to the beginning of the first message, and wait for a subsequent playback command. When you reach the end of the memory array, any subsequent pulsing of /M1_MESSAGE or /M2_NEXT will only result in a double beep. To proceed from this state the user must rewind the device to the beginning of the memory array. This can be accomplished by toggling the /CE pin low or cycling power. 3.1.3.2A Functional Description of Recording In Tape Mode using the Normal Option
- 61. On power-up, the device is ready to record or playback, starting at the first address in the memory array. Before you can begin recording, the /CE input must be set to low to enable the device and /RE must be set to low to enable recording. On a falling edge of the /M1_MESSAGE pin the device will beep once and initiate recording. A subsequent rising edge on the /M1 Message pin will stop recording and insert a single beep. If the M1_MESSAGE pin is held low beyond the end of the available memory, recording Stops automatically, and two beeps are inserted; regardless of the state of the /M1_MESSAGE pin. The device returns to the standby mode when the /M1_MESSAGE pin is returned high. A subsequent falling edge on the /M1_MESSAGE pin starts a new record operation in the memory array immediately following the last recorded message, thus preserving the last recorded message. To record over all previous messages you must pulse the /CE pin low once to reset the device to the beginning of the first message. You can then initiate a record sequence, as described above, to record a new message. The most recently recorded message will become the last recorded message and all previously recorded messages following this message will become inaccessible. If you wish to preserve any current messages it is recommend that the Auto Rewind option be used instead of the Normal option. If the Normal option is necessary the following sequence can be used. To preserve current messages you must fast forward past the messages you want to keep before you can record a new message. To fast forward when using the Normal option you must switch to play mode and listen to messages sequentially until you arrive at the beginning of the message you wish to overwrite. At this stage you should switch back to record mode and overwrite the desired message. The most recently recorded message will become the last recorded message and all previously recorded messages following this message will become inaccessible. All inputs, except /CE, are ignored during recording. 3.1.3.2B Functional Description of Playback in Tape Mode using the Normal Option On power-up or after a low to high transition on /RE the device is ready to record or playback starting at the first address in the memory array. Before you can begin playback of messages, the /CE input must be set to low to enable the device and /RE must be set to high to enable playback. The first high to low going pulse of the /M1_MESSAGE pin initiates playback from the beginning of the current message. When the /M1_MESSAGE pin pulses from high to low a second time, playback of the current message stops immediately. When the /M1_MESSAGE pin
- 62. pulses from high to low a third time, playback of the next message starts again from the beginning. If you hold the /M1_MESSAGE pin low continuously, the current message and subsequent messages play until the one of the following conditions is met: the end of the memory array is reached, the last message is reached, the /M1_message pin is released. If the last recorded message has already played, any further transitions on the /M1_MESSAGE pin will initiate a double beep for warning and the /M7_END pin will go low. To exit this state you must pulse the /CE pin high and then low once during standby to reset the pointer to the beginning of the first message. 3.2 Microprocessor Controlled Message Management: The APR9600 device incorporates several features design help simplify microprocessor Controlled message management When controlling messages the microprocessor essentially toggles pins as described in the message management sections described previously. The /BUSY, /STROBE, and /M7_END pins are included to simplify handshaking between the microprocessor and the APR9600. The /BUSY pin, when low, indicates to the host processor that the device is busy and that No commands can be accepted. When this pin is high the device is ready to accept and execute commands from the host. The /STROBE pin pulses low each time a memory segment is used. Counting pulses on this pin enables the host processor to accurately determine how much recording time has been used, and how much recording time remains. The APR9600 has a total of eighty memory segments. The /M7_END pin is used as an indicator that the device has stopped its current record or playback operation. During recording a low going pulse indicates that all memory has been used. During playback a low pulse indicates that the last message has played. Microprocessor control can also be used to link several APR9600 devices together in order to increase total available recording time. In this application both the speaker and microphone signals can be connected in parallel. The microprocessor will then control which device currently drives the speaker by enabling or disabling each device using its respective /CE pins. A continuous message cannot be recorded in multiple devices however because the transition from one device to the next will incur a delay that is noticeable upon playback. For this reason it is recommended that message boundaries and device boundaries always coincide.
- 63. 3.3 Signal Storage: The APR9600 samples incoming voice signals and stores the instantaneous voltage samples in non-volatile FLASH memory cells. Each memory cell can support voltage ranges from 0 to 256 levels. These 256 discrete voltage levels are the equivalent of 8-bit (28=256) binary encoded values. During playback the stored signals are retrieved from memory, smoothed to form a continuous signal, and then amplified before being fed to an external speaker. 3.4 Sampling Rate & Voice Quality: According to Shannon's sampling theorem, the highest possible frequency component introduced to the input of a sampling system must be equal to or less than half the sampling frequency if aliasing errors are to be eliminated. The APR9600 automatically filters its input, based on the selected sampling frequency, to meet this requirement. Higher sampling rates increase the bandwidth and hence the voice quality, but they also use more memory cells for the same length of recording time. Lower sampling rates use fewer memory cells and effectively increase the duration capabilities of the device, but they also reduce incoming signal bandwidth. The APR9600 accommodates sampling rates as high as 8 kHz and as low a 4 kHz. You can control the quality/duration trade off by controlling the sampling frequency. An internal oscillator provides the APR9600 sampling clock. Changing the resistance from the OscR pin to GND. Table2 summarizes resistance values and the corresponding sampling frequencies, as can change oscillator frequency well as the resulting input bandwidth and duration. 3.5 Automatic Gain Control (AGC): The APR9600 device has an integrated AGC. The AGC affects the microphone input but does not affect the ANA_IN input. The AGC circuit insures that the input signal is properly amplified. The AGC works by applying maximum gain to small input signals and minimum gain
- 64. to large input signals. This assures that inputs of varying amplitude are recorded at the optimum signal level. The AGC amplifier is designed to have a fast attack time and a slow decay time. This timing is controlled by the RC network connected to pin 19. A value of 220K and 4.7uF has been found to work well for the English language. Be aware that different languages, speakers from different countries, and music may all require modification of the recommended values for the AGC RC network. 3.6 Sampling Application: The following reference schematics are included as examples of how a recording system might be designed. Each reference schematic shows the device incorporated in one of its three main modes: Random Access, Tape mode – Normal option, and Tape mode – Auto Rewind option. Note that in several of the applications either one or all of the /BUSY, /STROBE, or /M7_END pins are connected to LEDs as indicators of device status. This is possible because all of these pins and signals were designed to have timing compatible with both microprocessor interface and manual LED indication. A bias must be applied to the electrets microphone in order to power its built-in circuitry. The ground return of this bias network is connected to the /Busy. This configuration saves power when record mode. Both pins 18 and 19, MicIn and MicRef, must be AC coupled to the microphone network in order to block the DC biasing voltage. Figure 3 shows the device configured in random access mode. The device is using eight Message segments, the maximum available, in this mode. Note that message trigger pins that are not used, for modes with less than eight segments, can be left unconnected with the exception of pin /M8_OPTION which should be pulled to VCC through a 100k resistor.
- 65. Fig 14: Random Access Mode
- 66. Fig 15: Tape Mode, Auto Rewind option Fig 16: Tape Mode, Normal option
- 70. Liquid crystal display Liquid crystal displays (LCDs) have materials, which combine the properties of both liquids and crystals. Rather than having a melting point, they have a temperature range within which the molecules are almost as mobile as they would be in a liquid, but are grouped together in an ordered form similar to a crystal. An LCD consists of two glass panels, with the liquid crystal material sand witched in between them. The inner surface of the glass plates are coated with transparent electrodes which
- 71. define the character, symbols or patterns to be displayed polymeric layers are present in between the electrodes and the liquid crystal, which makes the liquid crystal molecules to maintain a defined orientation angle. One each polarisers are pasted outside the two glass panels. These polarisers would rotate the light rays passing through them to a definite angle, in a particular direction. When the LCD is in the off state, light rays are rotated by the two polarisers and the liquid crystal, such that the light rays come out of the LCD without any orientation, and hence the LCD appears transparent. When sufficient voltage is applied to the electrodes, the liquid crystal molecules would be aligned in a specific direction. The light rays passing through the LCD would be rotated by the polarisers, which would result in activating/ highlighting the desired characters. The LCD’s are lightweight with only a few millimeters thickness. Since the LCD’s consume less power, they are compatible with low power electronic circuits, and can be powered for long durations. The LCD’s don’t generate light and so light is needed to read the display. By using backlighting, reading is possible in the dark. The LCD’s have long life and a wide operating temperature range. Changing the display size or the layout size is relatively simple which makes the LCD’s more customers friendly. The LCDs used exclusively in watches, calculators and measuring instruments are the simple seven-segment displays, having a limited amount of numeric data. The recent advances in technology have resulted in better legibility, more information displaying capability and a wider temperature range. These have resulted in the LCDs being extensively used in telecommunications and entertainment electronics. The LCDs have even started replacing the cathode ray tubes (CRTs) used for the display of text and graphics, and also in small TV applications. This section describes the operation modes of LCD’s then describe how to program and interface an LCD to 8051 using Assembly and C.
- 72. LCD operation In recent years the LCD is finding widespread use replacing LEDs(seven-segment LEDs or other multisegment LEDs).This is due to the following reasons: 1. The declining prices of LCDs. 2. The ability to display numbers, characters and graphics. This is in contract to LEDs, which are limited to numbers and a few characters. 3. Incorporation of a refreshing controller into the LCD, there by relieving the CPU of the task of refreshing the LCD. In the contrast, the LED must be refreshed by the CPU to keep displaying the data. 4. Ease of programming for characters and graphics. LCD pin description The LCD discussed in this section has 14 pins. The function of each pins is given in table. TABLE 1:Pin description for LCD: Pin symbol I/O Description 1 2 3 Vss Vcc VEE ---- Ground +5V power supply Power supply to I control contrast RS=0 to select 4 RS command register RS=1 to select 5 6 7 8 9 10 11 12 13 14 R/W E DB0 DB1 DB2 DB3 DB4 DB5 DB6 DB7 I data register R/W=0 for write I/O I/O I/O I/O I/O I/O I/O I/O I/O R/W=1 for read Enable The 8-bit data bus The 8-bit data bus The 8-bit data bus The 8-bit data bus The 8-bit data bus The 8-bit data bus The 8-bit data bus The 8-bit data bus
- 73. TABLE 2: LCD Command Codes Code Command to LCD Instruction (hex) 1 2 4 6 5 7 8 A C E F 10 14 18 1C 80 C0 38 Register Clear display screen Return home Decrement cursor Increment cursor Shift display right Shift display left Display off, cursor off Display off, cursor on Display on, cursor off Display on, cursor on Display on, cursor blinking Shift cursor position to left Shift cursor position to right Shift the entire display to the left Shift the entire display to the right Force cursor to beginning of 1st line Force cursor to beginning of 2nd line 2 lines and 5x7 matrix Uses: The LCDs used exclusively in watches, calculators and measuring instruments are the simple seven-segment displays, having a limited amount of numeric data. The recent advances in technology have resulted in better legibility, more information displaying capability and a wider temperature range. These have resulted in the LCDs being extensively used in telecommunications and entertainment electronics. The LCDs have even started replacing the cathode ray tubes (CRTs) used for the display of text and graphics, and also in small TV applications. LCD INTERFACING Sending commands and data to LCDs with a time delay:
- 74. Fig 21: Interfacing of LCD to a micro controller To send any command from table 2 to the LCD, make pin RS=0. for data, make RS=1.Then send a high –to-low pulse to the E pin to enable the internal latch of the LCD. Power supply The power supplies are designed to convert high voltage AC mains electricity to a suitable low voltage supply for electronics circuits and other devices. A power supply can by broken down into a series of blocks, each of which performs a particular function. A d.c power supply which maintains the output voltage constant irrespective of a.c mains fluctuations or load variations is known as “Regulated D.C Power Supply” For example a 5V regulated power supply system as shown below: