Downloaded 28 times

















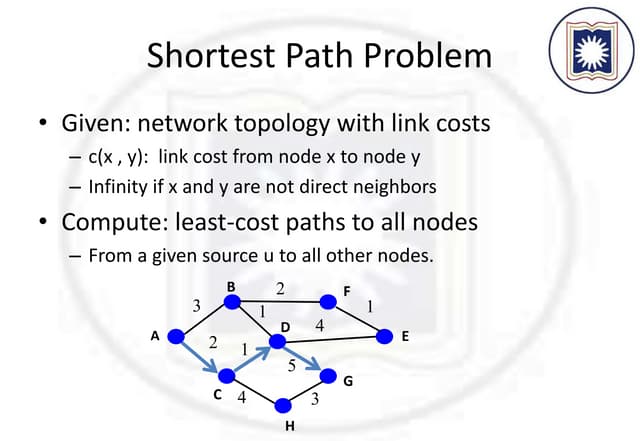
This document discusses using fractional calculus techniques for wind and solar power generation forecasting. It introduces a simple grid network model with three generation nodes and three load dispatch points. Forecasting the generation at each node separately is important for stability, rather than just aggregating the total generation. Statistical forecasting is formulated as an error minimization problem that can be solved using fractional derivatives. This allows incorporating the non-local nature of renewable generation. The document advocates using techniques like fractional PDEs and scenario analysis for computational forecasting methods. Accuracy data for wind and solar plant-level forecasts is also presented.






















![[Question Paper] Electronic and Communication Technology (Revised Course) [Ap...](https://cdn.slidesharecdn.com/ss_thumbnails/ect-qprevisedcourseapr-2014-170712140807-thumbnail.jpg?width=640&height=640&fit=bounds)