1) The document summarizes a lab report on wave tank experiments measuring wave properties like amplitude, period, and velocity under different conditions. Measurements were taken for waves between 0.5-1.4Hz.
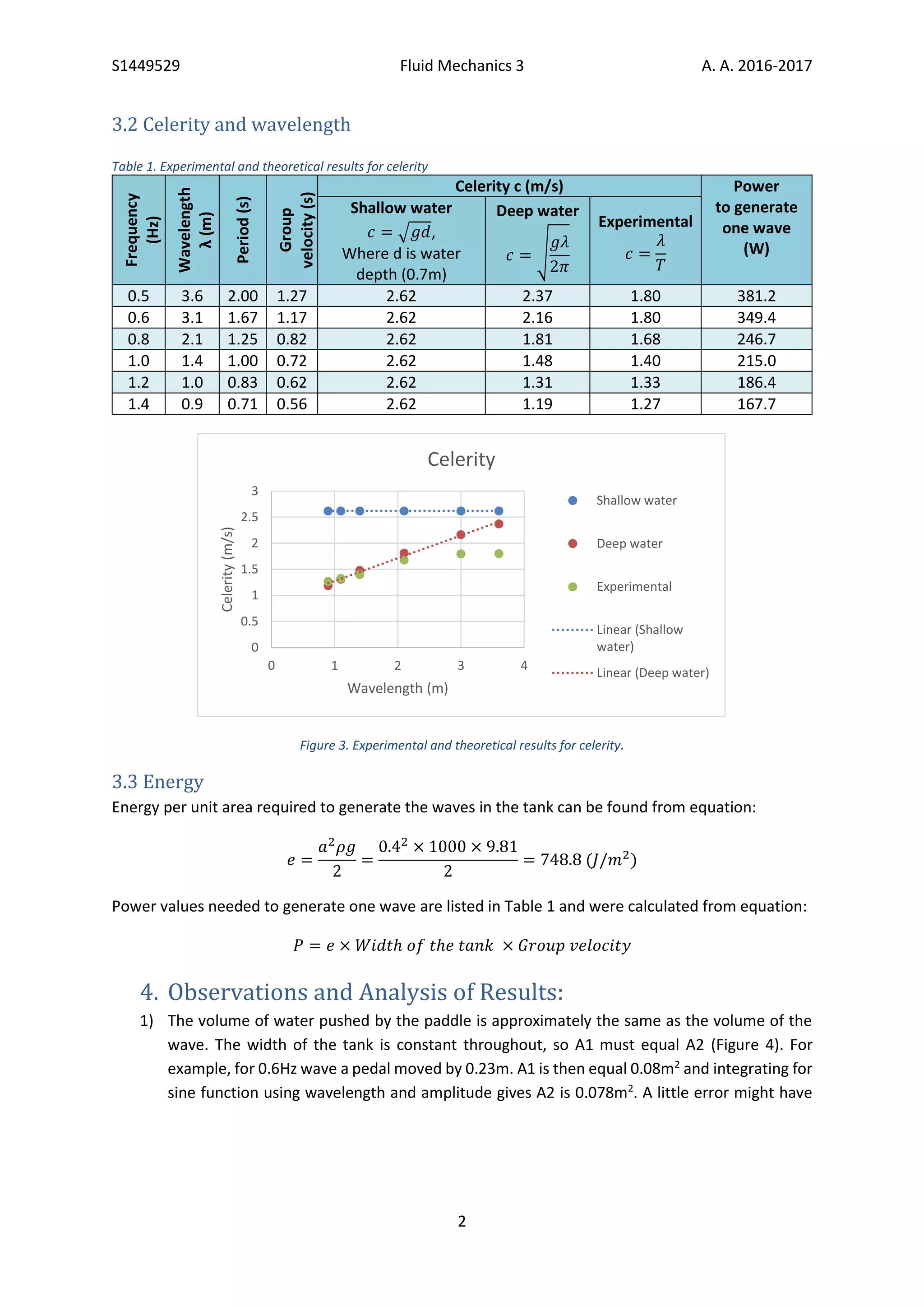
2) Results showed that experimentally measured wave velocity followed deep water wave theory for wavelengths up to 3m, but followed shallow water wave theory for wavelengths over 3m.
3) Key observations included verifying theoretical predictions for wave and particle motion, as well as demonstrating breaking waves formed by interference of different frequency waves.