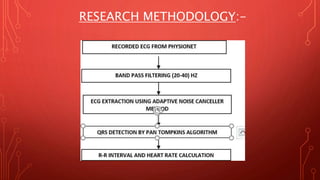
The document discusses the development of an adaptive noise canceller filter in MATLAB for electrocardiogram (ECG) signal analysis, focusing on various methodologies including band-pass filtering, adaptive filtering, and QRS detection using the Pan-Tompkins algorithm. It details the implementation of different filter types to enhance signal quality by eliminating noise and ensuring accurate detection of heart activity. The methodology aims to facilitate better clinical diagnosis by providing a more reliable ECG signal interpretation.