The document is a project report on vibration analysis of a wheelchair. It analyzes the wheelchair as a single degree of freedom (SDOF) system, then a two degree of freedom (TDOF) system, and finally as a multi degree of freedom (MDOF) system to account for increased complexity. Key steps include developing models of the wheelchair as a SDOF system, calculating natural frequency and response, then expanding the analysis to a TDOF and MDOF model considering additional masses and degrees of freedom. Graphs and equations are provided to analyze vibration properties at each level of complexity.
![1
In the fulfill of the requirement of the
Vibration of machines and structures
(MECH 6311)
Summer 15
A project report on
Vibration analysis of wheelchair
Submitted to
Dr. R Ganesan, Ph.D., Eng
By
Aniruddhsinh barad [7180217]
Bhoomirajsinh barad [7180225]
Viral kale [7677871]
Department of Mechanical and Industrial Engineering
Faculty of Engineering & Computer Science](https://image.slidesharecdn.com/560daf21-5365-4cc4-b0b2-4699a75efe41-170114145048/85/vibration-of-machines-and-structures-1-320.jpg)
![1
In the fulfill of the requirement of the
Vibration of machines and structures
(MECH 6311)
Summer 15
A project report on
Vibration analysis of wheelchair
Submitted to
Dr. R Ganesan, Ph.D., Eng
By
Aniruddhsinh barad [7180217]
Bhoomirajsinh barad [7180225]
Viral kale [7677871]
Department of Mechanical and Industrial Engineering
Faculty of Engineering & Computer Science](https://image.slidesharecdn.com/560daf21-5365-4cc4-b0b2-4699a75efe41-170114145048/75/vibration-of-machines-and-structures-1-2048.jpg)



![11
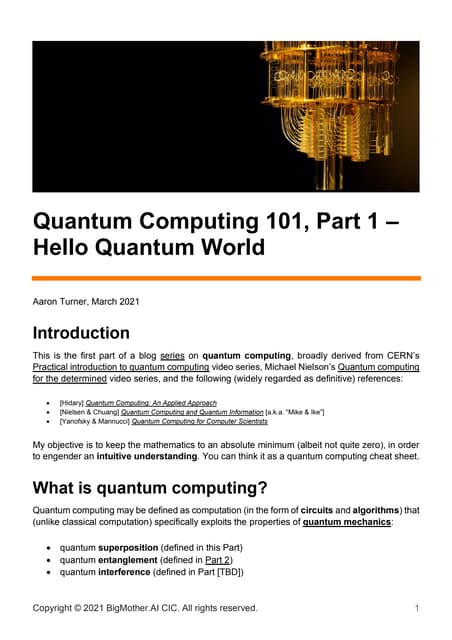
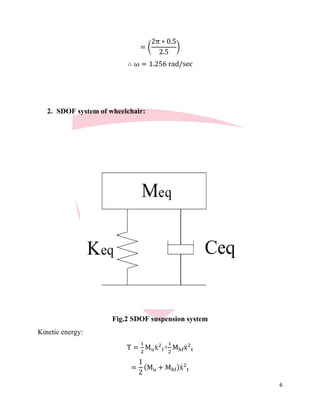
3. Two degree of freedom system [TDOF]:
Fig.3 Two DOF suspension system
Mu 𝑥 𝑢̈ = −Kuxu − Kcf(xu − xhf) − Ccf(𝑥 𝑢̇ − 𝑥ℎ𝑓)̇
Mhf 𝑥ℎ𝑓̈ = Kcf(xu − xhf) + Ccf(𝑥 𝑢̇ − 𝑥ℎ𝑓)̇
[
Mu 0
0 Mhf
] [
𝑥 𝑢̈
𝑥ℎ𝑓̈ ] + [
Ccf −Ccf
−Ccf Ccf
] ⌈
𝑥 𝑢̇
𝑥 𝑐𝑓̇ ⌉ + [
(Ku + Kcf) −Kcf
−Kcf Kcf
] ⌈
xu
xhf
⌉ = 0
[
xu
xhf
] = [
A1
A2
] 𝑠𝑖𝑛𝜔𝑡
⌈
𝑥 𝑢̇
𝑥 𝑐𝑓̇ ⌉ = 𝜔 [
A1
A2
] 𝑐𝑜𝑠𝜔𝑡
[
𝑥 𝑢̈
𝑥ℎ𝑓̈ ] = −𝜔2
[
A1
A2
] 𝑠𝑖𝑛𝜔𝑡](https://image.slidesharecdn.com/560daf21-5365-4cc4-b0b2-4699a75efe41-170114145048/85/vibration-of-machines-and-structures-11-320.jpg)
![12
−𝜔2
𝑠𝑖𝑛𝜔𝑡 [
Mu 0
0 Mhf
] [
A1
A2
] + 𝜔𝑐𝑜𝑠𝜔𝑡 [
Ccf −Ccf
−Ccf Ccf
] ⌈
A1
A2
⌉
+ 𝑠𝑖𝑛𝜔𝑡 [
(Ku + Kcf) −Kcf
−Kcf Kcf
] ⌈
A1
A2
⌉ = [
0
0
]
−𝜔2
[
1.2 0
0 63
] [
A1
A2
] + 𝜔 [
265 −265
−265 265
] ⌈
A1
A2
⌉
+ [
581600 −21600
−21600 21600
] ⌈
A1
A2
⌉ = [
0
0
]
𝜔2
[−1.2𝜔2
+ 265𝜔 + 581600 −265𝜔 + 21600
−265𝜔 − 21600 −63𝜔2
+ 265𝜔 + 21600
] ⌈
A1
A2
⌉ = [
0
0
]
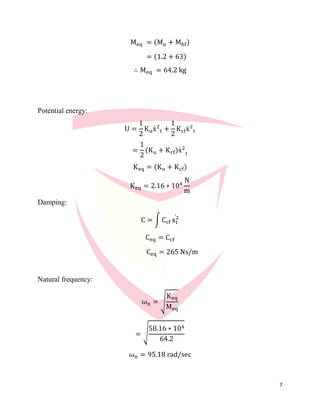
Solving the matrix we get the Eigen Values,
𝜆1 = 4.8468 ∗ 105
𝜆2 = 0.0033 ∗ 105
Using the Eigen values, we find out the Eigen vectors as below,
∅1 = {
0.999
−0.0007
}
∅2 = {
0.037
0.999
}](https://image.slidesharecdn.com/560daf21-5365-4cc4-b0b2-4699a75efe41-170114145048/85/vibration-of-machines-and-structures-12-320.jpg)
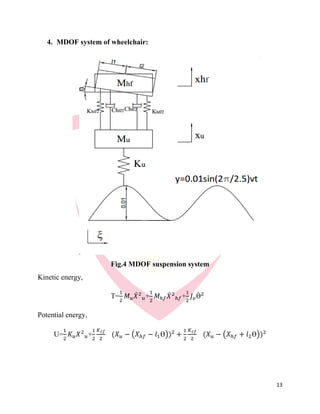
![14
Equation of motion,
1. 𝑞𝑖=𝑋 𝑢
𝑑
𝑑𝑡
(
𝜕𝑇
𝜕𝑋 𝑢
)= 𝑀 𝑢 𝑋̈ 𝑢
𝜕 𝑢
𝜕𝑥 𝑢
=𝐾 𝑢 𝑋 𝑢+
𝐾 𝑐𝑓
2
(𝑋 𝑢 − (𝑋ℎ𝑓 − 𝑙1Ɵ))+
𝐾 𝑐𝑓
2
(𝑋 𝑢 − (𝑋ℎ𝑓 + 𝑙2Ɵ))
𝑴 𝒖 𝑿̈ 𝒖+𝑿 𝒖(𝑲 𝒖 + 𝑲 𝒄𝒇)-𝑲 𝒄𝒇 𝑿 𝒉𝒇+
𝑲 𝒄𝒇
𝟐
Ɵ(𝒍 𝟏 − 𝒍 𝟐)=0
Now, 𝑞1̇ =𝑋ℎ𝑓
𝑑
𝑑𝑡
(
𝜕𝑇
𝜕𝑋̇ 𝐻𝐹
)= 𝑀ℎ𝑓 𝑋̈2
ℎ𝑓
𝜕𝑈
𝜕𝑋ℎ𝑓
=−
𝐾 𝑐𝑓
2
(𝑋 𝑢 − 𝑋ℎ𝑓 + 𝑙1Ɵ)- −
𝐾 𝑐𝑓
2
(𝑋 𝑢 − 𝑋ℎ𝑓 − 𝑙2Ɵ)
𝑴 𝒉𝒇 𝑿̈ 𝟐
𝒉𝒇 −
𝑲 𝒄𝒇
𝟐
(𝑿 𝒖 − 𝑿 𝒉𝒇 + 𝒍 𝟏Ɵ)- −
𝑲 𝒄𝒇
𝟐
(𝑿 𝒖 − 𝑿 𝒉𝒇 − 𝒍 𝟐Ɵ)=0
𝑓𝑜𝑟, 𝑞𝑖 =Ɵ
(
𝜕𝑇
𝜕𝜃
) = 𝐽˳𝜃̈
𝑑
𝑑𝑡
𝜕𝑈
𝜕𝜃
=
−𝐾𝑐𝐹
2
𝑙1(𝑥𝑢 − 𝑥ℎ𝐹 + 𝑙1𝜃) +
𝐾𝑐𝐹
2
𝑙2 (𝑥𝑢 − 𝑥ℎ𝐹 − 𝑙2𝜃)
𝑱˳𝜽̈ +
𝑲𝒄𝑭
𝟐
𝒙𝒖 (𝒍𝟐 − 𝒍𝟏) +
𝑲𝒄𝑭
𝟐
𝒙𝒉𝑭(𝒍𝟏 − 𝒍𝟐) −
𝑲𝒄𝑭
𝟐
(𝒍𝟏 𝟐
+ 𝒍𝟐 𝟐
)𝜽
[
𝑚 𝑢 0 0
0 𝑚ℎ𝑓 0
0 0 𝑗𝑜
] {
𝑥̈ 𝑢
𝑥̈ℎ𝑓
Ɵ̈
}+
[
𝑘 𝑢 + 𝑘 𝑐𝑓 −𝑘 𝑐𝑓
𝑘 𝑐𝑓(𝑙1−𝑙2)
2
−𝑘 𝑐𝑓 𝑘 𝑐𝑓
𝑘 𝑐𝑓(𝑙2−𝑙1)
2
𝑘 𝑐𝑓(𝑙1−𝑙2)
2
𝑘 𝑐𝑓(𝑙2−𝑙1)
2
−𝑘 𝑐𝑓(𝑙12+𝑙22)
2 ]
{
𝑋𝑢
𝑋ℎ𝑓
Ɵ
} = {
0
0
0
}](https://image.slidesharecdn.com/560daf21-5365-4cc4-b0b2-4699a75efe41-170114145048/85/vibration-of-machines-and-structures-14-320.jpg)
![15
Now we take
{
𝑋𝑢
𝑋ℎ𝑓
Ɵ
} = {
𝐴𝑢
𝐴ℎ𝑓
Ɵℎ𝑓
} sinωt
-ω2
sin ωt[
𝑚 𝑢 0 0
0 𝑚ℎ𝑓 0
0 0 𝑗𝑜
] {
𝑋𝑢
𝑋ℎ𝑓
Ɵ
} +sin
ωt
[
𝑘 𝑢 + 𝑘 𝑐𝑓 −𝑘 𝑐𝑓
𝑘 𝑐𝑓(𝑙1−𝑙2)
2
−𝑘 𝑐𝑓 𝑘 𝑐𝑓
𝑘 𝑐𝑓(𝑙2−𝑙1)
2
𝑘 𝑐𝑓(𝑙1−𝑙2)
2
𝑘 𝑐𝑓(𝑙2−𝑙1)
2
−𝑘 𝑐𝑓(𝑙12+𝑙22)
2 ]
{
𝑋𝑢
𝑋ℎ𝑓
Ɵ
} = {
0
0
0
}
-ω2
[
1.2 0 0
0 63 0
0 0 0.5419
] {
𝑋𝑢
𝑋ℎ𝑓
Ɵ
} +
[
581600 −2.16 ∗ 104
0
−2.16 ∗ 104
2.16 ∗ 104
0
0 0 −111.48
] {
𝑋𝑢
𝑋ℎ𝑓
Ɵ
}={
0
0
0
}
Assume, ω2
=⅄
[
581600 − 1.2⅄ −2.16 ∗ 104
0
−2.16 ∗ 104
2.16 ∗ 104
− 63⅄ 0
0 0 −111.48 − 0.5419⅄
] {
𝑋𝑢
𝑋ℎ𝑓
Ɵ
}={
0
0
0
}
⅄=[
4.84679 0 0
0 0.00330115 0
0 0 −0.0205720
] 105
⅄1=4.84679*105
⅄2=0.00330115*105](https://image.slidesharecdn.com/560daf21-5365-4cc4-b0b2-4699a75efe41-170114145048/85/vibration-of-machines-and-structures-15-320.jpg)
![16
⅄3=-0.0205720*105
𝜔3𝑛=0.0+45.3341i
𝜔1𝑛=696.19 𝑟𝑎𝑑
𝑠𝑒𝑐⁄
𝜔2𝑛=18.16 𝑟𝑎𝑑
𝑠𝑒𝑐⁄
𝜔3𝑛=45.35 𝑟𝑎𝑑
𝑠𝑒𝑐⁄
Eigen vectors,
∅1 = {
0.9999
−0.000707
0
}
∅2 = {
0.0371386
0.931012
0
}
∅3 = {
0
0
1.000
}
Modal matrix,
P=[
0.9999 0.0371386 0
−0.000707 0.9931012 0
0 0 1.000
]
𝑃 𝑇
=[
0.9999 −0.000707 0
0.0371386 0.9931012 0
0 0 1.000
]](https://image.slidesharecdn.com/560daf21-5365-4cc4-b0b2-4699a75efe41-170114145048/85/vibration-of-machines-and-structures-16-320.jpg)
![17
Generalizes mass,
𝑃 𝑇
𝑀𝑃=[
1.2 0 0
0 62.9147 0
0 0 0.054190
]
Generalized stiffness,
𝑃 𝑇
𝐾𝑃=[
5.8163 0 0
0 0.2076911 0
0 0 −0.00111480
]
Amplitude ratio
Y=0.01,
ƺ=0.022
𝐹𝑜𝑟, 𝑟=
𝜔
𝜔 𝑛1
=1.8*10−3
𝑋
𝑌
=√
1+(2ƺ𝑟)2
(1−𝑟2)2+(2ƺ𝑟)2
𝑋
𝑌
=√
1+(2∗0.022∗1.8∗10−3)2
(1−1.8∗10−32
)
2
+(2∗0.022∗1.8∗10−3)2
X=0.01 m
𝐹𝑜𝑟, 𝑟=
𝜔
𝜔 𝑛2
=0.069
𝑋
𝑌
=√
1+(2ƺ𝑟)2
(1−𝑟2)2+(2ƺ𝑟)2
𝑋
𝑌
=√
1+(2∗0.022∗0.069)2
(1−0.0692)2+(2∗0.022∗0.069)2
X=0.01 m](https://image.slidesharecdn.com/560daf21-5365-4cc4-b0b2-4699a75efe41-170114145048/85/vibration-of-machines-and-structures-17-320.jpg)
![18
Frequency ratio:
𝐹𝑜𝑟, 𝑟=
𝜔
𝜔 𝑛3
=0.027
Y=0.00989m
𝑋
𝑌
=√
1+(2ƺ𝑟)2
(1−𝑟2)2+(2ƺ𝑟)2
𝑋
𝑌
=√
1+(2∗0.022∗0.027)2
(1−0.0272)2+(2∗0.022∗0.027)2
X=0.01 m
Now we consider the force 𝑓0 sinωt
Where 𝑓0=500 N
F=[
0
𝑓0 sin ωt
0
]
F=[
0
500
0
] sin ωt
𝑃 𝑇
F=[
0.9999 −0.000707 0
0.0371386 0.9931012 0
0 0 1.000
] [
0
500
0
] sin ωt
𝑃 𝑇
F=[
18.569
499.65
0
] sin ωt](https://image.slidesharecdn.com/560daf21-5365-4cc4-b0b2-4699a75efe41-170114145048/85/vibration-of-machines-and-structures-18-320.jpg)