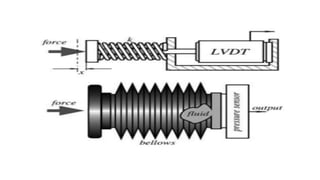
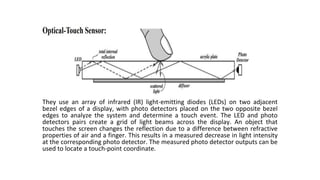
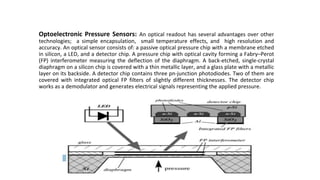
The document discusses various types of force and pressure sensors. It describes Newton's laws of motion and defines force and pressure. Quantitative and qualitative force sensors are discussed. Common force sensors include strain gauges, load cells, and tactile sensors. Tactile sensors are further divided into touch, spatial, and slip sensors. The document also covers different types of pressure sensors and transducers, including strain gauges, piezoelectric sensors, capacitive sensors, and optoelectronic pressure sensors. Common components of pressure transducers like the piston, Bourdon tube, bellows, and diaphragm are also summarized.