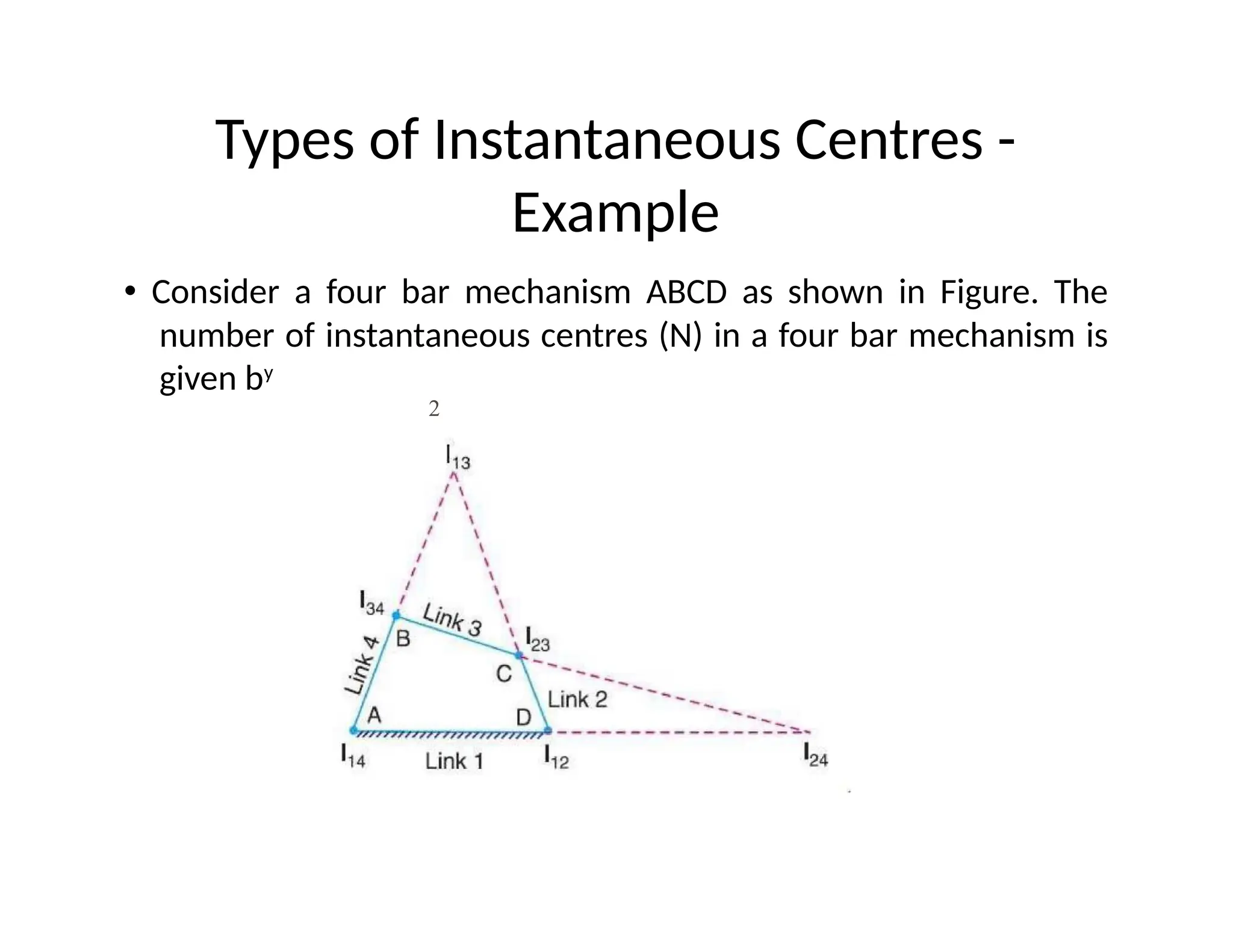
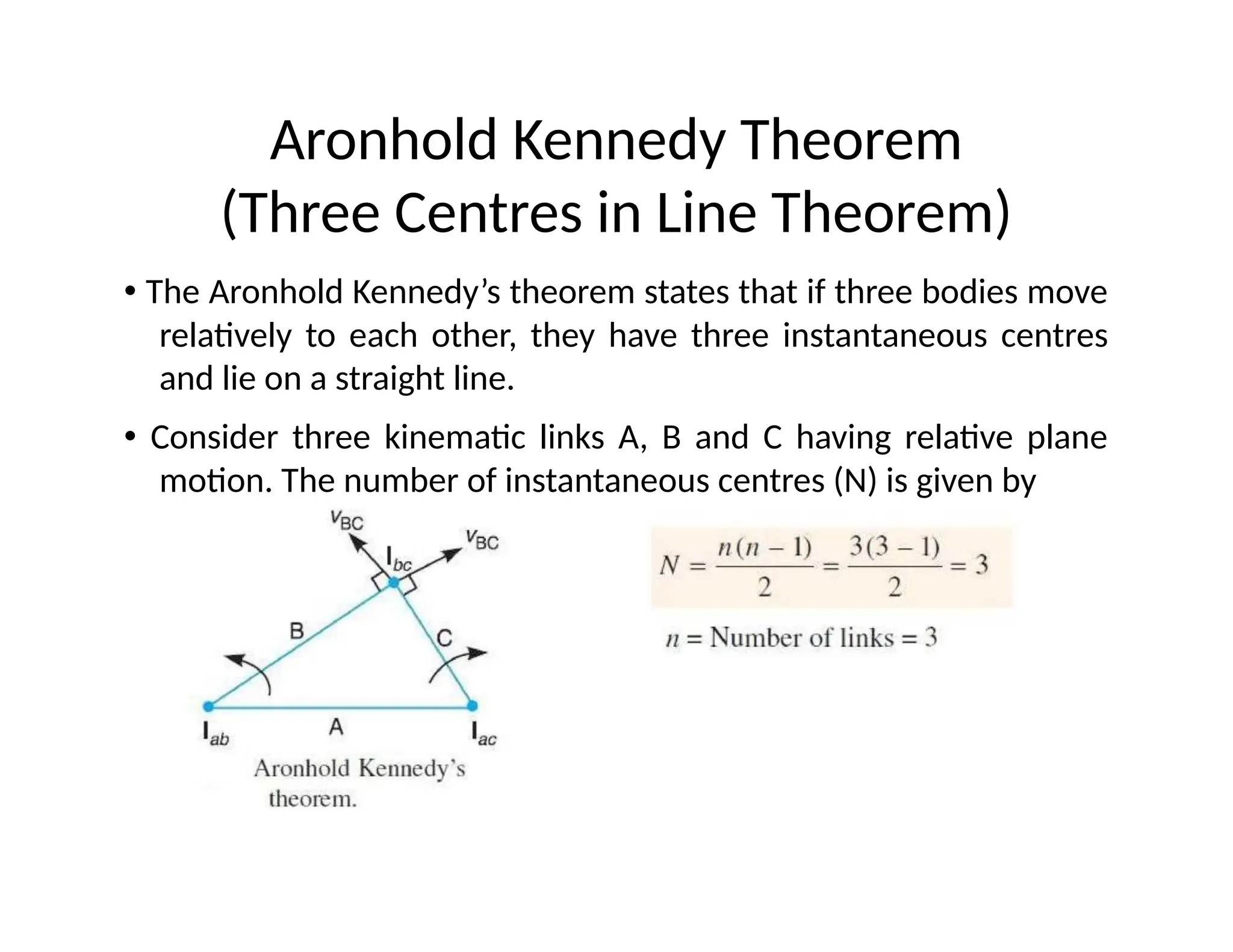
The document discusses the kinematics of machinery, focusing on linkage mechanisms and instantaneous centres, which are points that change position during motion. It outlines different types of instantaneous centres, including fixed and permanent centres, and presents the Aronhold Kennedy theorem, which states that three bodies in relative motion have three instantaneous centres that lie on a straight line. The document also mentions methods for analyzing velocities in mechanisms, such as the instantaneous centre method and the relative velocity method.







![Mechanics of machinery [Recovered].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/mechanicsofmachineryrecovered-220808081831-415b3c97-thumbnail.jpg?width=640&height=640&fit=bounds)