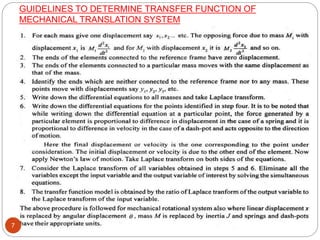
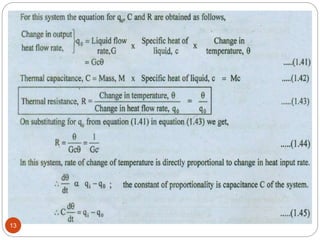
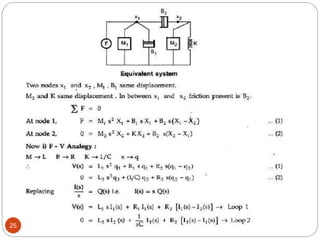
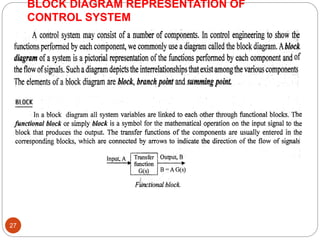
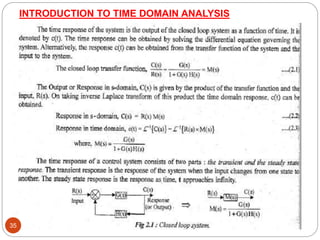
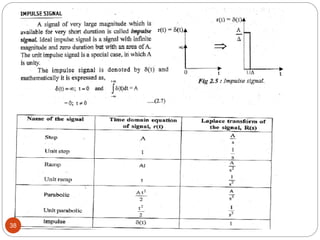
The document discusses different types of physical systems that can be modeled for control systems, including mechanical, thermal, hydraulic, and electrical systems. It provides details on determining the transfer function for mechanical translation systems. Thermal systems involve heat transfer through conduction, convection, or radiation. Hydraulic systems include liquid level systems and hydraulic devices that use incompressible oil. The document also covers mathematical modeling of electrical systems and using block diagram representations of control systems, including steps to solve block diagram reduction problems.