Downloaded 18 times
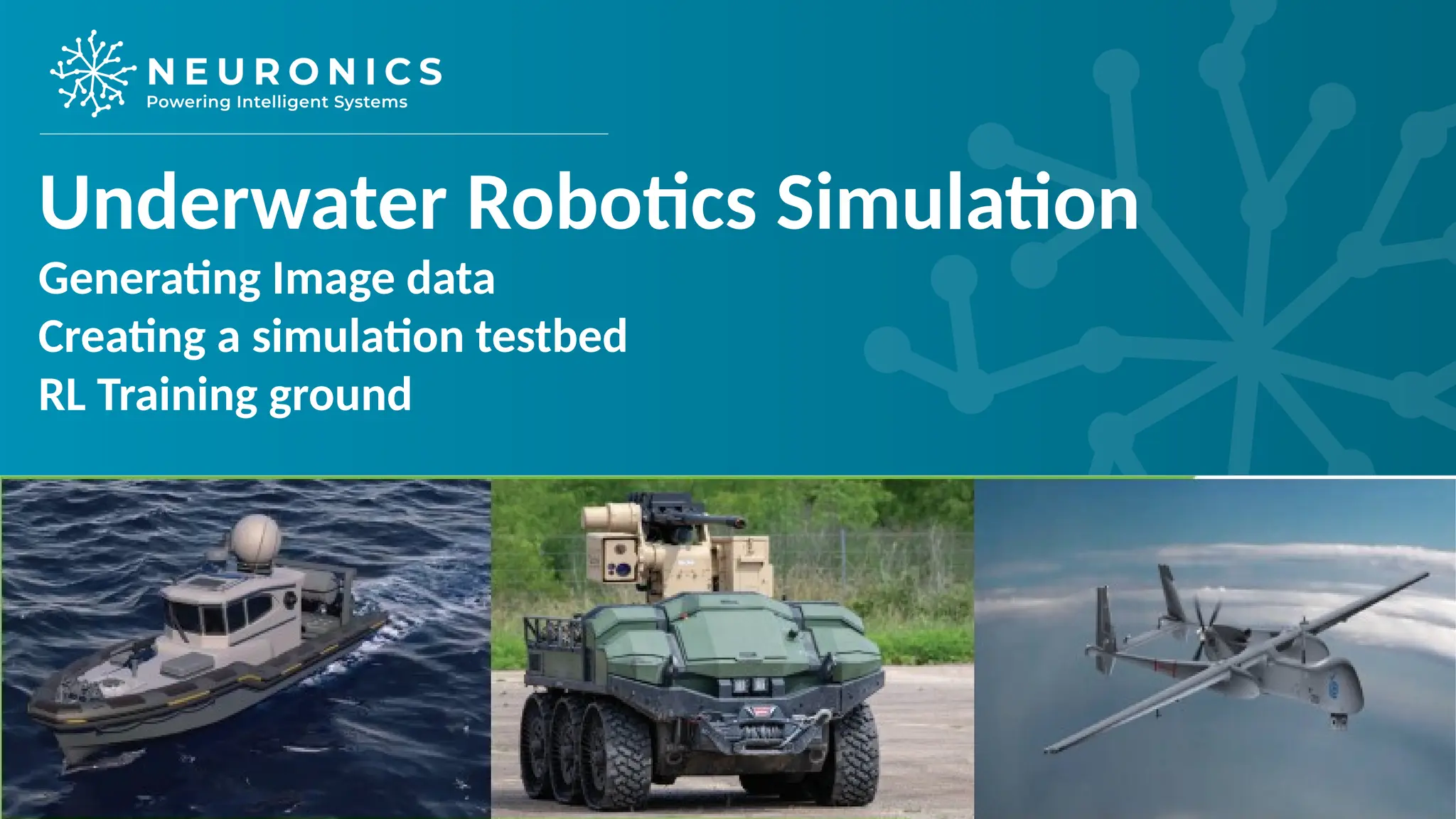
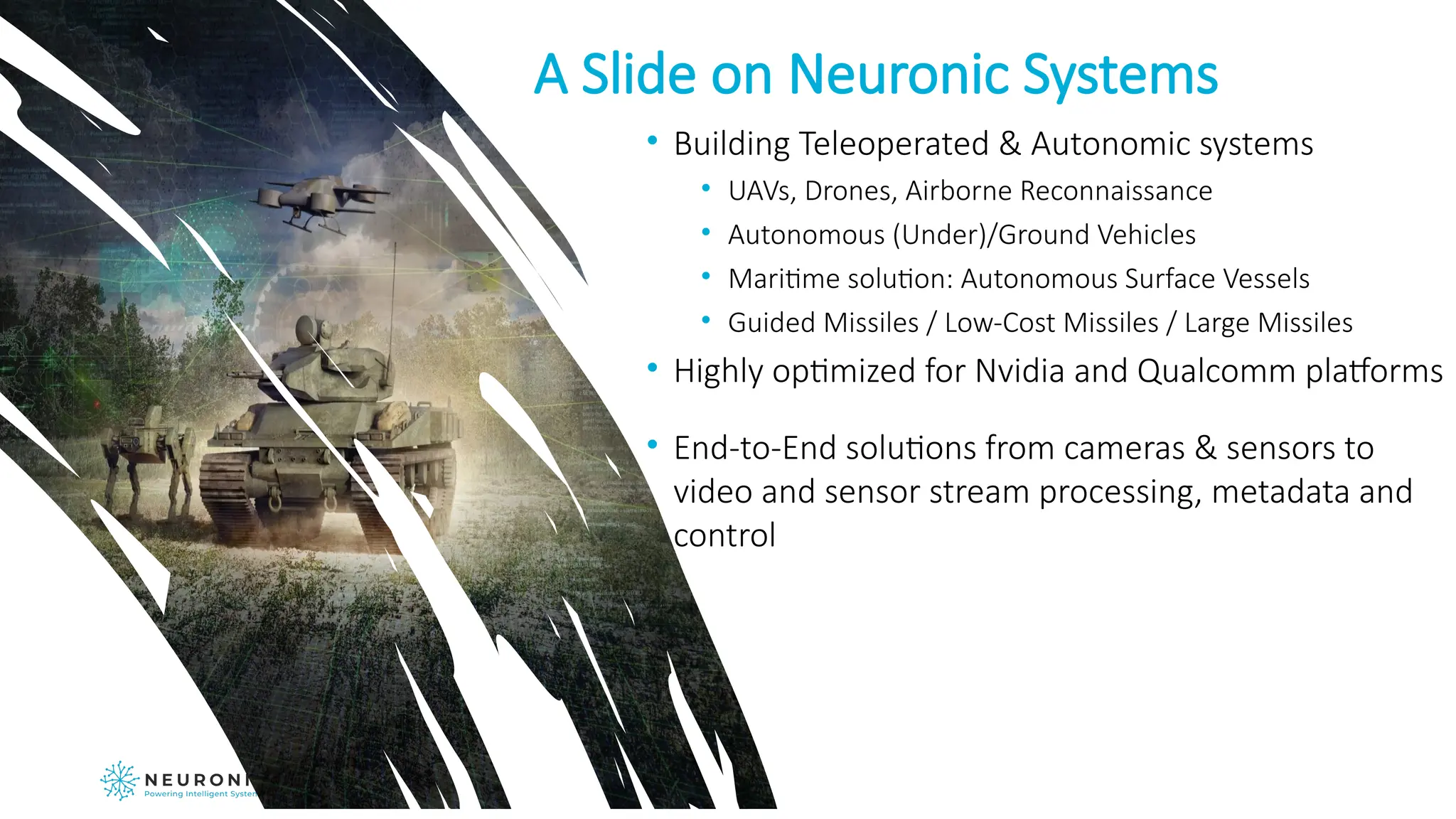

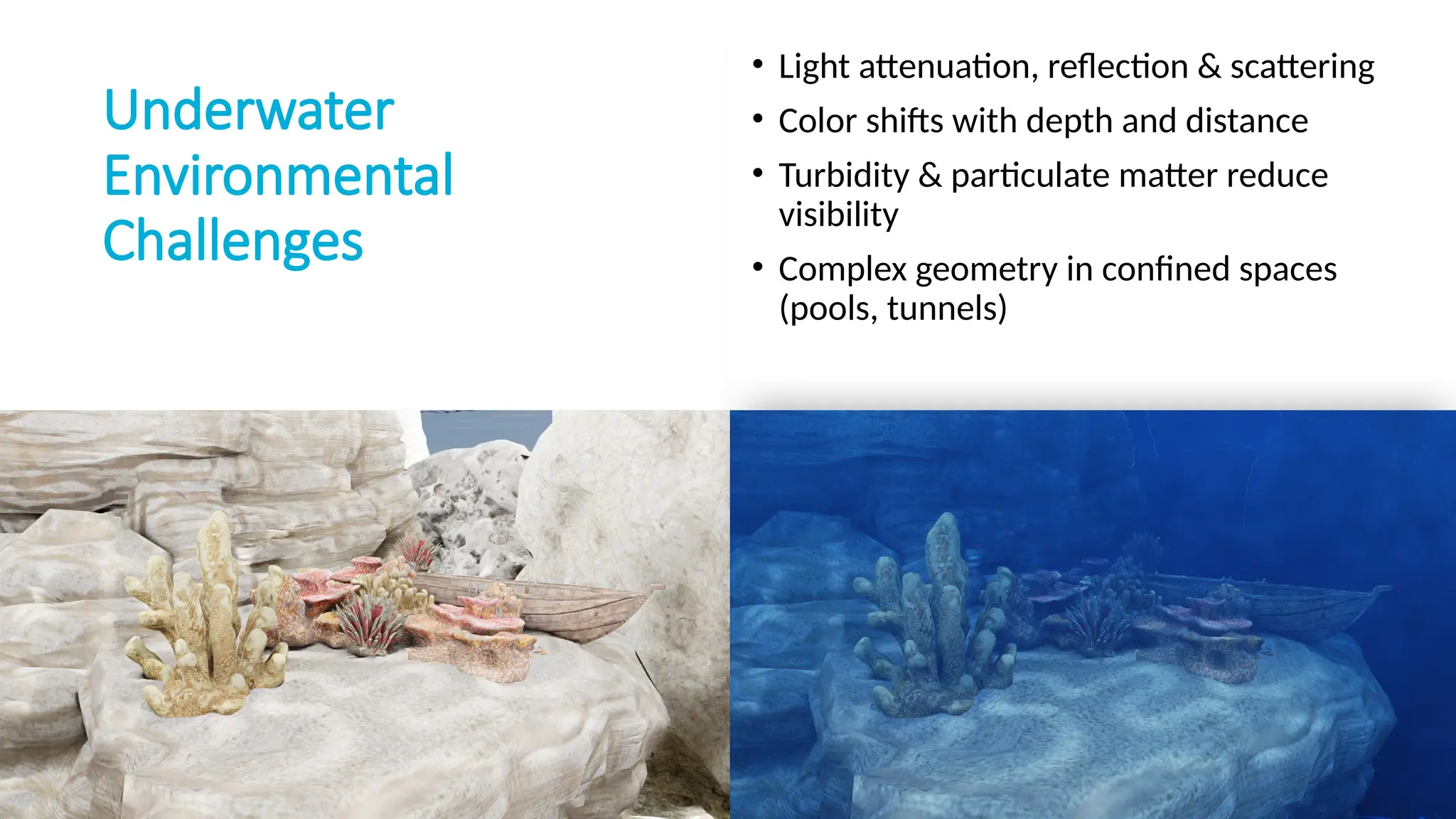











The document discusses the development and simulation of underwater robotics, focusing on generating image data for teleoperated and autonomous systems. It highlights various challenges in underwater environments, such as light attenuation and visibility issues, and emphasizes the benefits of simulations for testing and refining algorithms efficiently. Integration of reinforcement learning and realistic simulations helps accelerate the advancement of underwater robotics in various applications, including inspection, mapping, and warfare.