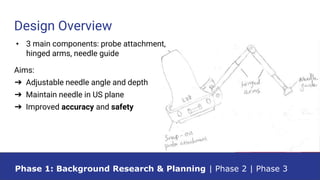
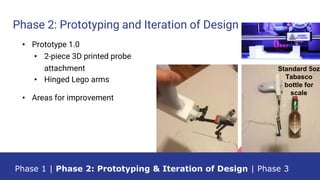
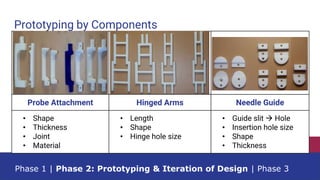
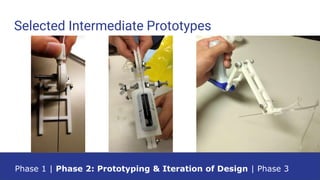
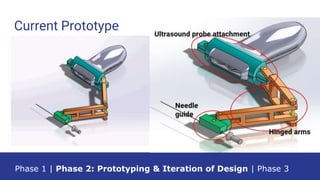
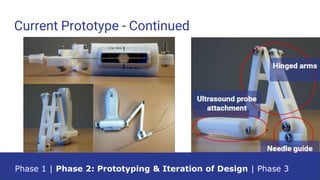
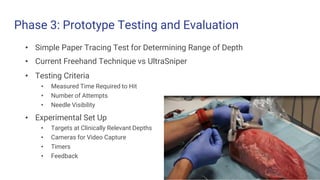
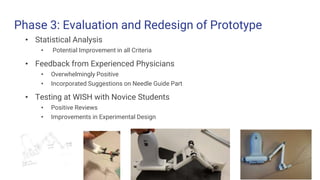
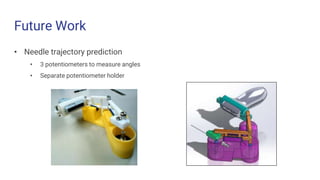
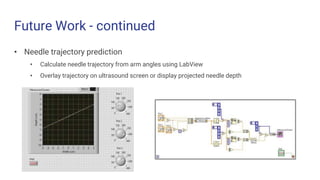
UltraSniper is an ultrasound needle guide designed to improve the safety and accuracy of nerve block procedures by ensuring the needle remains visible in the ultrasound plane. The current prototype consists of an adjustable probe attachment and hinged arms to guide the needle at varying angles and depths. Testing showed UltraSniper improved accuracy and reduced attempts compared to freehand techniques. Future work includes integrating potentiometers to predict needle trajectory and develop sterilization methods for clinical use.