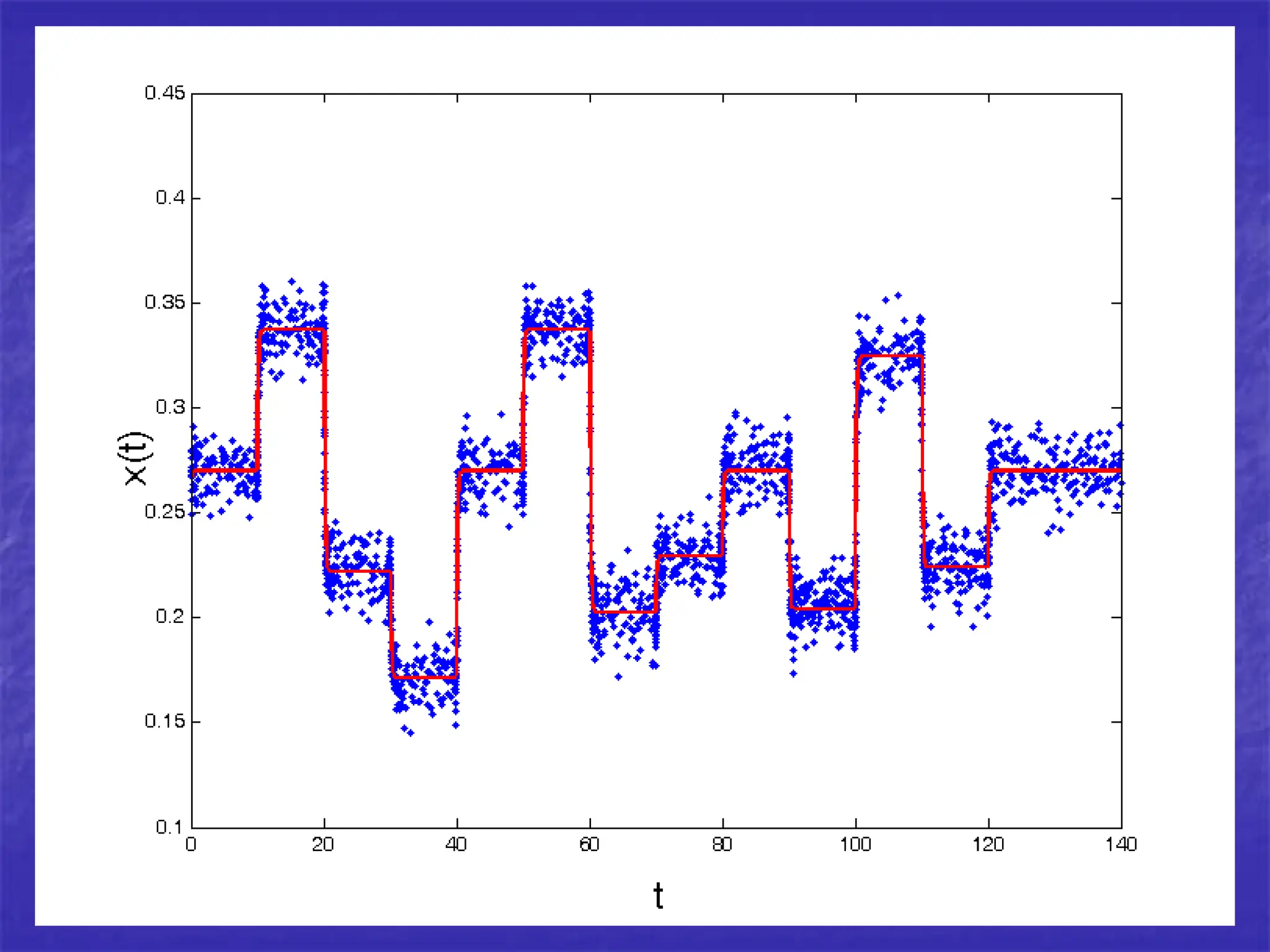
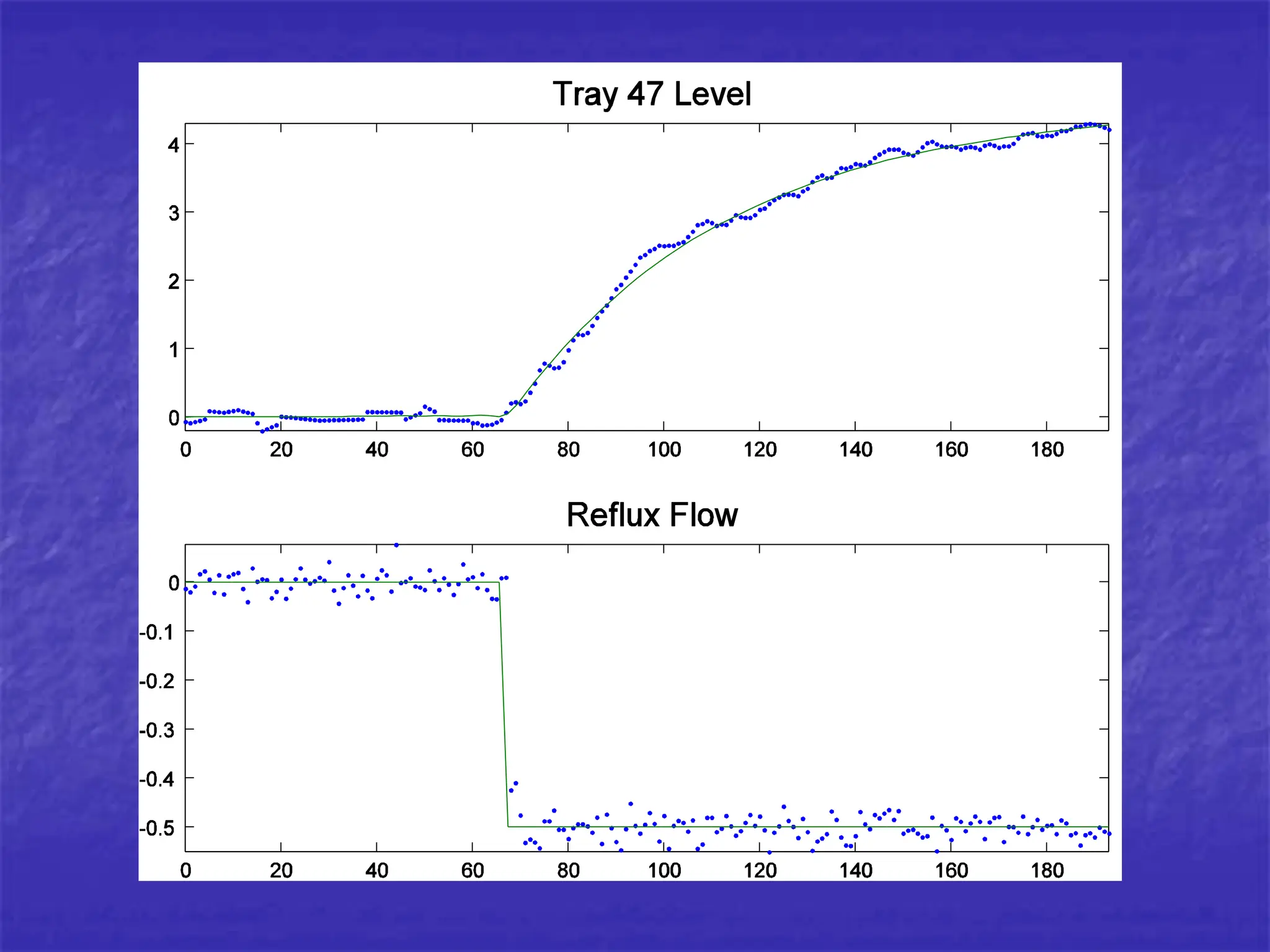
Differential equations can be powerful tools for modeling data. New methods allow estimating differential equations directly from data. As an example, the author estimates a differential equation model from simulated data from a chemical reactor. The estimated parameters are close to the true values, demonstrating the method works well on simulated data.
![From Data to Differential
Equations
Jim Ramsay
McGill University
( ) [ ( ), ]
Dx t f x t t
](https://image.slidesharecdn.com/fromdatatodifferentialequations-231008095055-02399aac/75/from_data_to_differential_equations-ppt-1-2048.jpg)
![In this simple case, an analytic solution is
possible:
0
( ) ( )[ (0) [ ( )/ ( )] ]
t
x t h t x s u s h s ds
However, in most situations involving
DIFE’s it is necessary to use numerical
methods to find the solution.
where
0
( )
( )
t
s ds
h t e
](https://image.slidesharecdn.com/fromdatatodifferentialequations-231008095055-02399aac/75/from_data_to_differential_equations-ppt-15-2048.jpg)
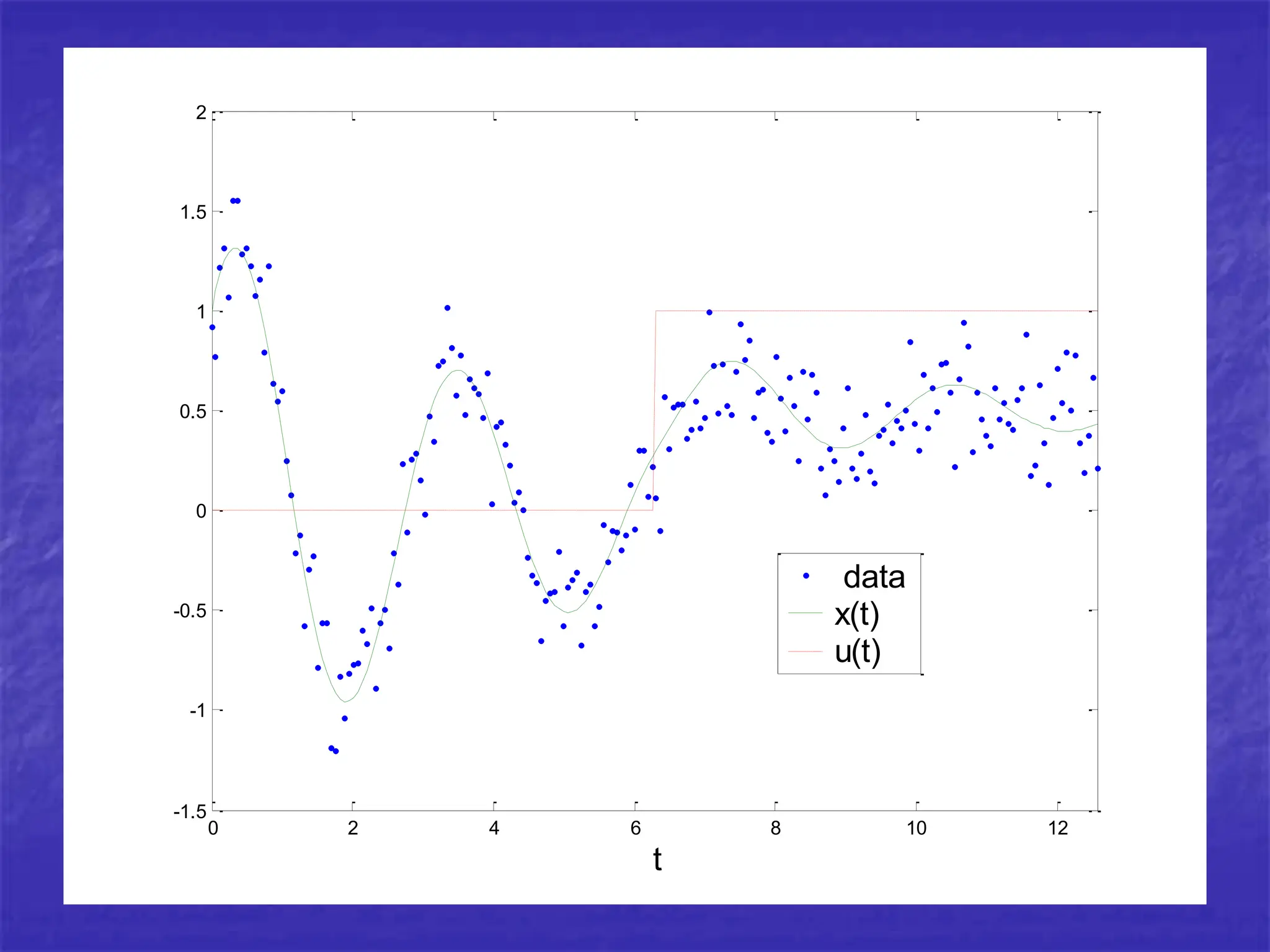
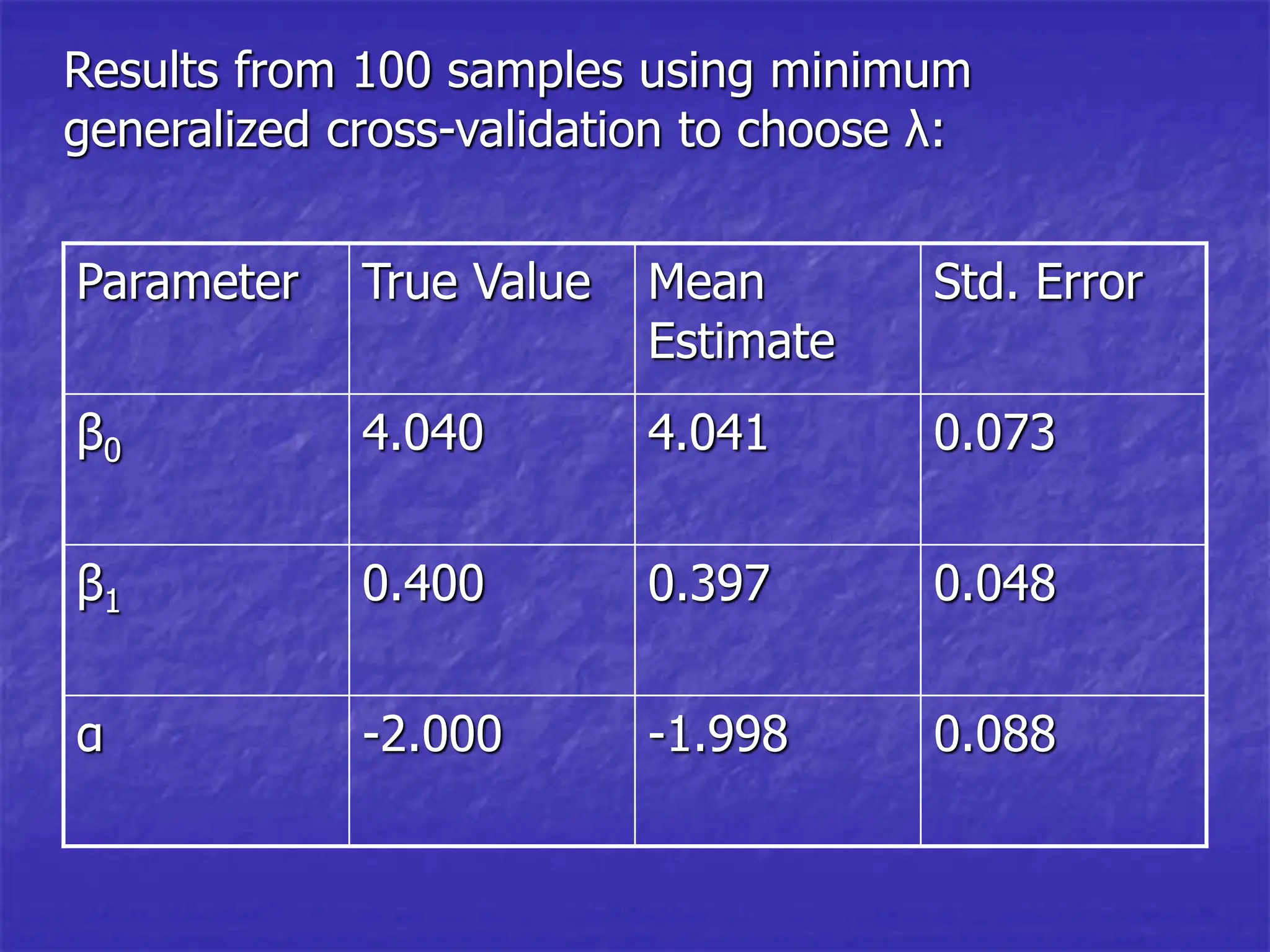
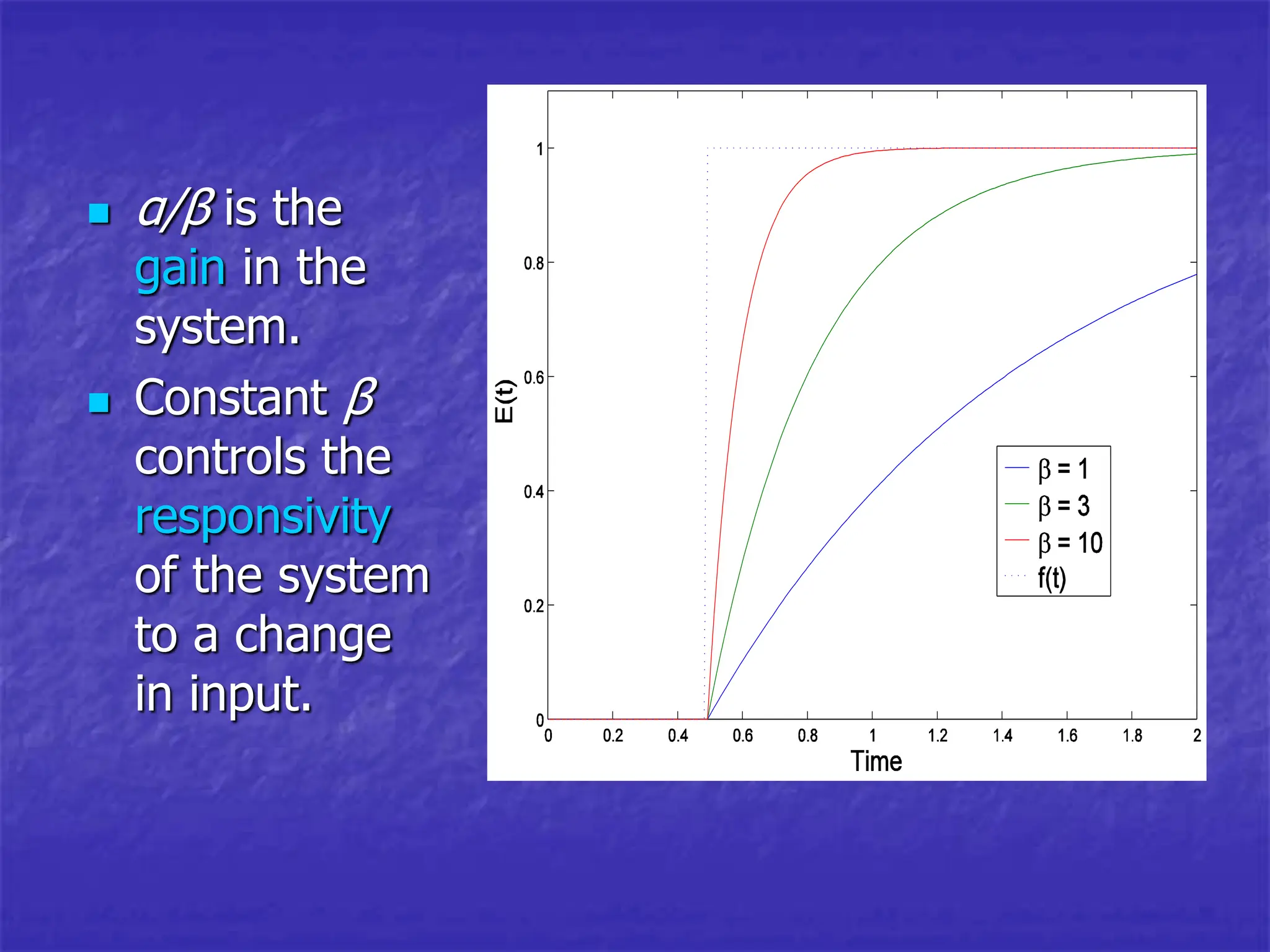
![A constant coefficient example
We can see more clearly what happens
when
Coefficients α and β are constants,
u(t) is a function stepping from 0 to 1
at time t1:
1
( )
1
( ) [1 ],
t t
x t e t t
](https://image.slidesharecdn.com/fromdatatodifferentialequations-231008095055-02399aac/75/from_data_to_differential_equations-ppt-16-2048.jpg)
![The smooth values
If x(t) is expanded in terms of a set K basis
functions φk(t), and if N by K matrix Z contains
the values of these functions at time points ti,
then the vector fitting the data is
1
, [ ' , ] '[ , ]
, ', ,
y Z Z Z R Z y s
R L L s L u
](https://image.slidesharecdn.com/fromdatatodifferentialequations-231008095055-02399aac/75/from_data_to_differential_equations-ppt-21-2048.jpg)