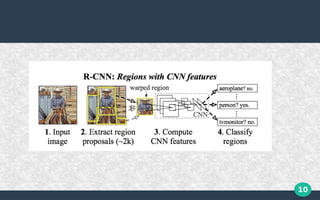
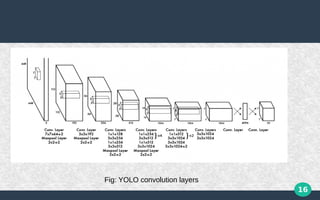
This document discusses object detection using deep neural networks. It describes different types of neural networks including convolutional neural networks (CNNs), which are well-suited for object detection tasks. CNNs use techniques like parameter sharing and sparse connections to recognize visual patterns. Popular object detection algorithms that use CNNs are R-CNN, which proposes regions and classifies them, and YOLO (You Only Look Once), which frames detection as a single regression problem from image to bounding boxes. While very fast, YOLO struggles with small or grouped objects and unusual aspect ratios.





















































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)

