The document presents an overview of real-time object detection techniques, detailing their significance in various applications such as autonomous vehicles, surveillance, and robotics. It covers methods like deep learning algorithms, feature-based approaches, and optimization techniques for real-time processing, alongside discussing challenges and future trends in the field. Additionally, a literature review highlights research findings on advancements in algorithms and their implementation in practical scenarios.

![Fig:1. Sample Image of Real-time object detection (RTOD) [6] [7]
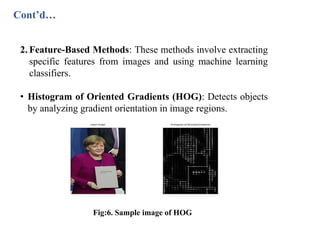
1(a) 1(b)](https://image.slidesharecdn.com/seminar-ipptvivekrt-objectdetection-240730140350-471084c6/85/Seminar-I-PPT-Vivek-RT-Object-Detection-pptx-4-320.jpg)
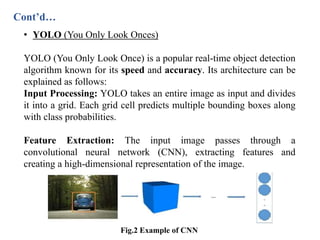
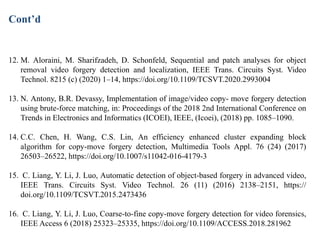
![Grid Division: The image is divided into an S x S grid. Each grid cell
predicts bounding boxes and their confidence scores. YOLO predicts
these bounding boxes using regression for the coordinates (x, y) of the
bounding box, width, height, and the confidence score for each box.
Fig:3 Sample Image of Grid Division [10] [[11]
4(a) 4(b)](https://image.slidesharecdn.com/seminar-ipptvivekrt-objectdetection-240730140350-471084c6/85/Seminar-I-PPT-Vivek-RT-Object-Detection-pptx-7-320.jpg)
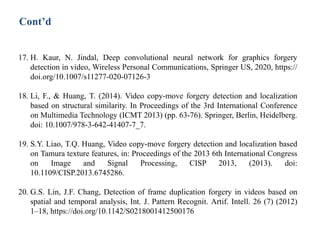
![Non-Max Suppression: After predictions, YOLO uses non-maximum
suppression to refine the bounding boxes by eliminating duplicate
detections and keeping the most confident ones that means selecting
the higher one.
Fig:4. Sample Image of Non-max Suppression [8]](https://image.slidesharecdn.com/seminar-ipptvivekrt-objectdetection-240730140350-471084c6/85/Seminar-I-PPT-Vivek-RT-Object-Detection-pptx-9-320.jpg)
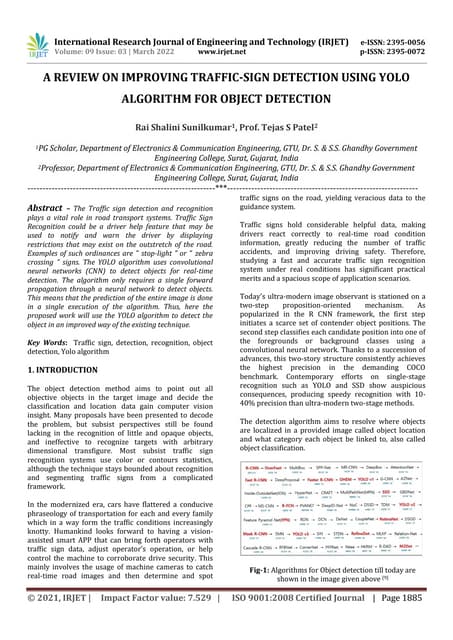
![Output: The final output is a list of bounding boxes along with their
class labels and confidence scores, providing the detected objects
and their positions in the image.
Fig:5. Sample image of output [9]](https://image.slidesharecdn.com/seminar-ipptvivekrt-objectdetection-240730140350-471084c6/85/Seminar-I-PPT-Vivek-RT-Object-Detection-pptx-10-320.jpg)
![LITERATURE REVIEW
Name of the Author(s) PaperTitle Findings
Juanxia et al. Dec
(2022) [2]
Application of leakage pre-
warning system for
hazardous chemical storage
tank based on YOLOv3-
prePReLU algorithm
• In this paper, 6000 pictures under
different experimental conditions were
collected when storage tank discharged
continuously, and then an image dataset
of tank leakage was generated. Then it
was trained by YOLOv3, YOLOv3-
PostPReLU, and YOLOv3-prePReLU
algorithms, the experimental results
showed that the mean average precision
(mAP) of YOLOv3-prePReLU algorithm
was 0.89, which was more accurate than
that of other algorithms.](https://image.slidesharecdn.com/seminar-ipptvivekrt-objectdetection-240730140350-471084c6/85/Seminar-I-PPT-Vivek-RT-Object-Detection-pptx-17-320.jpg)
![LITERATURE REVIEW
Name of the
Author(s)
PaperTitle Findings
Yurika Permana
sari et al.
December 2022
[1]
Innovative Region
Convolutional Neural
Network Algorithm For
Object Identification
• The purpose of this study was to
analyze the development of object
identification in the search for the best
algorithm in terms of the speed and
efficiency of identification.
• The use of the CNN algorithm in the
identification of image objects, starting
with the region CNN technique, is
improved with Fast R-CNN, Faster-
CNN, and Mask R-CNN.
• The researcher has developed
Algorithm from facial recognition and
the identification of moving images.](https://image.slidesharecdn.com/seminar-ipptvivekrt-objectdetection-240730140350-471084c6/85/Seminar-I-PPT-Vivek-RT-Object-Detection-pptx-18-320.jpg)
![LITERATURE REVIEW
Name of the
Author(s)
PaperTitle Findings
Punam
Sunil Raskar et al.
October 2021 [3]
Real time object-based
video forgery detection
using YOLO (V2)
This paper has proposed a new approach
for the detection of Copy-Move attack in
passive blind videos. Object-based
forgery detection approach is
implemented using fast and real-time
object detector “You Only Look Once -
Version 2″YOLO (V2).](https://image.slidesharecdn.com/seminar-ipptvivekrt-objectdetection-240730140350-471084c6/85/Seminar-I-PPT-Vivek-RT-Object-Detection-pptx-19-320.jpg)
![LITERATURE REVIEW
Name of the
Author(s)
PaperTitle Findings
Xiaozhi Chen et al.,
(2020) [4]
Deep Multi-modal Object
Detection and Semantic
Segmentation for
Autonomous Driving
1. This review paper attempts to
systematically summarize
methodologies and discuss challenges
for deep multi-modal object detection
and semantic segmentation in
autonomous driving
2. This paper presents an approach
that combines multi-modal
information (camera and
LiDAR) for real-time object
detection and semantic
segmentation in autonomous](https://image.slidesharecdn.com/seminar-ipptvivekrt-objectdetection-240730140350-471084c6/85/Seminar-I-PPT-Vivek-RT-Object-Detection-pptx-20-320.jpg)
![LITERATURE REVIEW
Name of the
Author(s)
5
PaperTitle Findings
Baoping Xao.
et al., (2021)
[5]
Real-Time Object Detection
Algorithm of Autonomous
Vehicles Based on Improved
YOLOv5s
1. This paper proposes a real-time
object detection algorithm based
on improved YOLOv5s. By
adding shallow high-resolution
features and changing the size of
output feature map, the detection
ability of the algorithm for small
objects is significantly improved.
2. Experimental results show that
the improved YOLOv5s
algorithm enhances the detection
ability of small objects and proves
its feasibility in various complex
road scenes.](https://image.slidesharecdn.com/seminar-ipptvivekrt-objectdetection-240730140350-471084c6/85/Seminar-I-PPT-Vivek-RT-Object-Detection-pptx-21-320.jpg)
![REFERENCES
1. Yurika Permanasari, Budi Nurani Ruchjana , Setiawan Hadi and Juli Rejito
(2022) Innovative Region Convolutional Neural Network Algorithm for Object
Identification Journal of Open Innovation: Technology, Market, and Complexity
Volume 8, Issue4, December 2022, 182
2. Juanxia He , Yao Xiao , Liwen Huang , Angang Li , Yan Chen ,Ye Ma , Wen Li,
Dezhi Liu , Yongzhong Zhan Application of leakage pre-warning system for
hazardous chemical storage tank based on YOLOv3-prePReLU algorithm,
Journal of Loss Prevention in the Process Industries 80 (2022) 104905
3. Punam Sunil Raskara,, Sanjeevani Kiran Shahb, Real time object-based video
forgery detection using YOLO (V2), Forensic Science International 327 (2021)
110979
4. Di Feng, Christian Haase-Schütz Lars Rosenbaum, Heinz Hertlein, Claudius
Glaeser, Fabian Timm, Werner Wiesbeck, Klaus Dietmayer, Deep Multi-modal
Object Detection and Semantic Segmentation for Autonomous Driving: Datasets,
Methods, and Challenges, [Submitted on 21 Feb 2019 (v1), last revised 8 Feb
2020 (this version, v4)]
5. Baoping Xiao; Jinghua Guo; Zhifei He, Real-Time Object Detection Algorithm
of Autonomous Vehicles Based on Improved YOLOv5s, Proceedings of the 2021
5th CAA International Conference on Vehicular Control and Intelligence (CVCI),
Tianjin, China, October 29-31, 2021
, , ,
, , ,](https://image.slidesharecdn.com/seminar-ipptvivekrt-objectdetection-240730140350-471084c6/85/Seminar-I-PPT-Vivek-RT-Object-Detection-pptx-24-320.jpg)