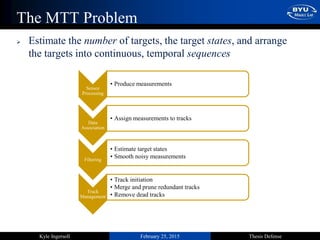
The document summarizes Kyle Ingersoll's master's thesis defense presentation on vision-based multiple target tracking using recursive RANSAC (R-RANSAC). The presentation covers an overview of the R-RANSAC approach, improvements made to R-RANSAC including different data association methods and handling of highly maneuverable objects. It also compares R-RANSAC to other multiple target tracking filters and discusses potential improvements like incorporating tracker-sensor feedback and machine learning.
![February 25, 2015 Thesis DefenseKyle Ingersoll
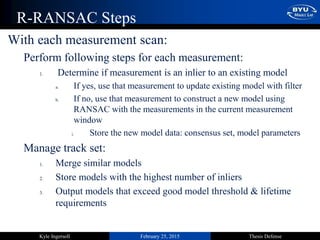
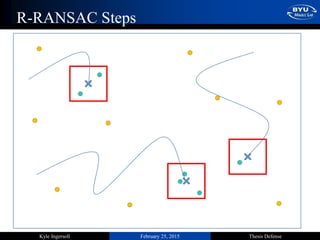
RANSAC[1]
Randomly samples data points
Creates models with those data points
Stores model with the highest number of inliers
https://canvas.instructure.com/courses/743674/assignments/1929377](https://image.slidesharecdn.com/a93baf06-19b3-4158-8b40-39e4ac63234d-150407113211-conversion-gate01/85/ThesisDefensePresentation_KyleIngersoll-5-320.jpg)

![February 25, 2015 Thesis DefenseKyle Ingersoll
Recursive-RANSAC[2,3]
Able to robustly track multiple targets in the
presence of gross errors
Performs data association, filtering, and track
initiation steps
Requires model of target motion
Does not require a priori knowledge of number
of targets, birth and death times of targets, or
distribution of signal clutter](https://image.slidesharecdn.com/a93baf06-19b3-4158-8b40-39e4ac63234d-150407113211-conversion-gate01/85/ThesisDefensePresentation_KyleIngersoll-7-320.jpg)
![February 25, 2015 Thesis DefenseKyle Ingersoll
Other RANSAC Variants
1. Sequential-RANSAC[4]
Estimates multiple signals from a single batch of data
2. Multiple-Model RANSAC[5]
Roughly estimates signal states for classification and
to improve data association
3. Incremental-RANSAC[6]
Only estimates one model; hypotheses generated at
each time step using newly arrived features
4. KALMANSAC[7]
Estimates an optimal state and set of inliers for a
single model at each time step with RANSAC](https://image.slidesharecdn.com/a93baf06-19b3-4158-8b40-39e4ac63234d-150407113211-conversion-gate01/85/ThesisDefensePresentation_KyleIngersoll-10-320.jpg)
![February 25, 2015 Thesis DefenseKyle Ingersoll
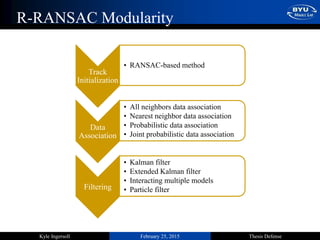
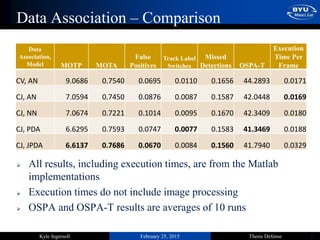
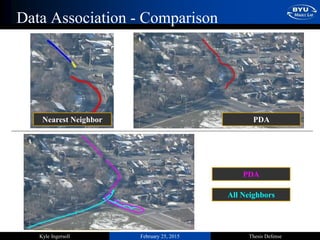
Data Association
All neighbors
Update Kalman filter with all validated measurements
Nearest neighbor
Update Kalman filter with nearest validated measurement
Probabilistic data association (PDA) [8]
Calculate measurement association probabilities of all
validated measurements. Incorporate information about
clutter distribution, gate probability, and probability of
detection.
Joint probabilistic data association (JPDA) [9]
Jointly calculate measurement association probabilities
across all targets.](https://image.slidesharecdn.com/a93baf06-19b3-4158-8b40-39e4ac63234d-150407113211-conversion-gate01/85/ThesisDefensePresentation_KyleIngersoll-13-320.jpg)
![February 25, 2015 Thesis DefenseKyle Ingersoll
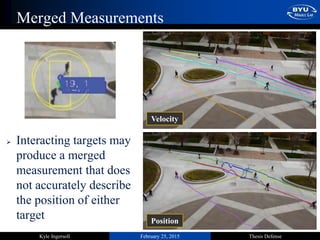
Highly Maneuverable Objects
Replace the nearly-
constant velocity
(CV) model with the
nearly-constant jerk
(CJ) model[10]
Negligible change in
computational time
Able to retain
RANSAC-based track
initialization method](https://image.slidesharecdn.com/a93baf06-19b3-4158-8b40-39e4ac63234d-150407113211-conversion-gate01/85/ThesisDefensePresentation_KyleIngersoll-17-320.jpg)
![February 25, 2015 Thesis DefenseKyle Ingersoll
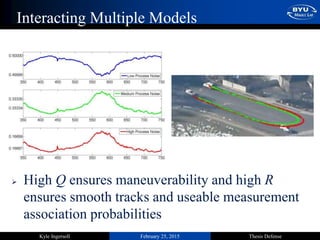
Interacting Multiple Models[11]](https://image.slidesharecdn.com/a93baf06-19b3-4158-8b40-39e4ac63234d-150407113211-conversion-gate01/85/ThesisDefensePresentation_KyleIngersoll-18-320.jpg)
![February 25, 2015 Thesis DefenseKyle Ingersoll
Comparison with GM-PHD Filter[12]
R-RANSAC, CJ-IMMPDA GM-PHD Filter](https://image.slidesharecdn.com/a93baf06-19b3-4158-8b40-39e4ac63234d-150407113211-conversion-gate01/85/ThesisDefensePresentation_KyleIngersoll-20-320.jpg)
![February 25, 2015 Thesis DefenseKyle Ingersoll
Tracker-Sensor Feedback Loop[13]
Use information from the tracker to inform how
we perform sensor processing.
Sensor
Processing
Data
Association
Filtering
Track
Management
Tracker](https://image.slidesharecdn.com/a93baf06-19b3-4158-8b40-39e4ac63234d-150407113211-conversion-gate01/85/ThesisDefensePresentation_KyleIngersoll-23-320.jpg)
![February 25, 2015 Thesis DefenseKyle Ingersoll
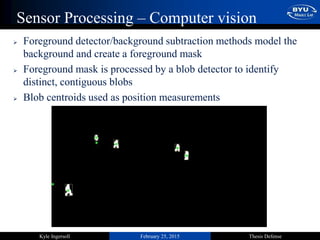
Modified Foreground Detector
Based upon the Gaussian mixture models
(GMM) architecture[14,15]
Zero the background update rate of valid
target-associated pixels
Target extent measured directly from
foreground mask
Kalman filter-based minimum blob area
threshold
Measurement velocity estimated by
matching features and clustering optical
flow vectors[16] using sequential-
RANSAC[4]](https://image.slidesharecdn.com/a93baf06-19b3-4158-8b40-39e4ac63234d-150407113211-conversion-gate01/85/ThesisDefensePresentation_KyleIngersoll-24-320.jpg)
![February 25, 2015 Thesis DefenseKyle Ingersoll
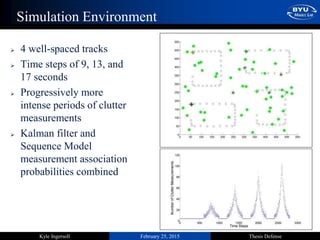
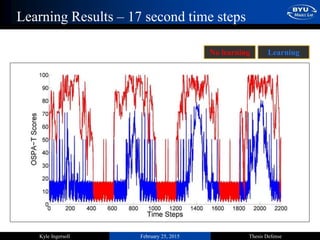
Tracking with Machine Learning
Learn probable target trajectories with the Sequence Model[17,18] and use that
information to improve tracking, especially during scenarios with infrequent
measurement updates and high proportion of clutter](https://image.slidesharecdn.com/a93baf06-19b3-4158-8b40-39e4ac63234d-150407113211-conversion-gate01/85/ThesisDefensePresentation_KyleIngersoll-30-320.jpg)