More Related Content

PDF

PDF
230420_東工大授業「ロボット技術」資料.pdf 
PDF
論文紹介「PointNetLK: Robust & Efficient Point Cloud Registration Using PointNet」 
PDF
Cartographer を用いた 3D SLAM 
PDF

PPTX
Deep Learningのための専用プロセッサ「MN-Core」の開発と活用(2022/10/19東大大学院「 融合情報学特別講義Ⅲ」) 
PPTX

PDF
What's hot

PDF
STMとROSをシリアル通信させて移動ロボットを作る 
PDF

PDF
論文紹介 Semantic Mapping for Mobile Robotics Tasks: A Survey ![[DL輪読会]GQNと関連研究,世界モデルとの関係について](https://cdn.slidesharecdn.com/ss_thumbnails/20180817-180827085537-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[DL輪読会]GQNと関連研究,世界モデルとの関係について 
PPTX

PDF

PPTX
【DL輪読会】DayDreamer: World Models for Physical Robot Learning ![[DL輪読会]Pay Attention to MLPs (gMLP)](https://cdn.slidesharecdn.com/ss_thumbnails/kobayashi-210528032327-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[DL輪読会]Pay Attention to MLPs (gMLP) 
PDF
Intro to SVE 富岳のA64FXを触ってみた 
PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東) 
PDF
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日 
PDF

PPTX

PDF
constexpr関数はコンパイル時処理。これはいい。実行時が霞んで見える。cpuの嬌声が聞こえてきそうだ ![[DL輪読会]A Bayesian Perspective on Generalization and Stochastic Gradient Descent](https://cdn.slidesharecdn.com/ss_thumbnails/20171106dl2-171108033614-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[DL輪読会]A Bayesian Perspective on Generalization and Stochastic Gradient Descent 
PDF
30th コンピュータビジョン勉強会@関東 DynamicFusion 
PPTX
【DL輪読会】Transformers are Sample Efficient World Models 
PDF
SSII2019OS: 深層学習にかかる時間を短くしてみませんか? ~分散学習の勧め~ 
PDF

PPTX
You Only Look One-level Featureの解説と見せかけた物体検出のよもやま話 ご注文はSTM32の開発ですか?
- 1.
- 2.
目次
• 自己紹介
• STM32の開発
•なぜSTM32CubeHALなのか
• 高機能ペリフェラル例、様々なミドルウェア
• STM32開発のはじめ方
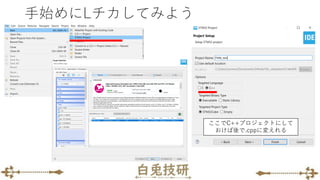
• Lチカしてみよう
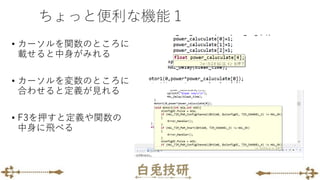
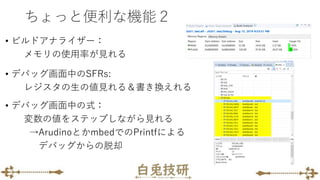
• ちょっと便利な機能
• CANをCubeHALで使ってみる
• CAN-FDをCubeHALで使ってみる
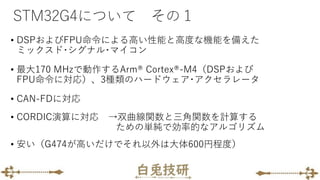
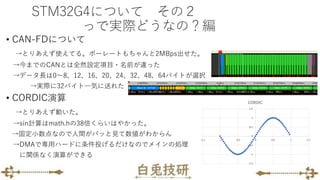
• STM32G4について
• ブログの紹介
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
CANを使う その2
• 用意する変数、構造体等
CAN_TxHeaderTypeDefTxHeader; 送信ハンドラー
CAN_RxHeaderTypeDef RxHeader; 受信ハンドラー
uint8_t TxData[8]; 送信データ配列
uint8_t RxData[8]; 受信データ配列
uint32_t TxMailbox; 送信箱
• 送信フィルタ
TxHeader.StdId = 0x456; 送信ID
TxHeader.RTR = CAN_RTR_DATA;
TxHeader.IDE = CAN_ID_STD;
TxHeader.DLC = 3; 送信byte数
TxHeader.TransmitGlobalTime = DISABLE;
- 22.
- 23.
- 24.
• 用意する変数
FDCAN_TxHeaderTypeDef TxHeader;
FDCAN_RxHeaderTypeDefRxHeader;
uint8_t TxData[50];
uint8_t RxData[50];
uint32_t TxMailbox;
• 送信フィルタ
TxHeader.Identifier = 0x123; →送信ID
TxHeader.IdType = FDCAN_STANDARD_ID;
TxHeader.TxFrameType = FDCAN_DATA_FRAME;
TxHeader.DataLength = FDCAN_DLC_BYTES_32; →32byte一気に送れる
TxHeader.ErrorStateIndicator = FDCAN_ESI_ACTIVE;
TxHeader.BitRateSwitch = FDCAN_BRS_ON;
TxHeader.FDFormat = FDCAN_FD_CAN;
TxHeader.TxEventFifoControl = FDCAN_STORE_TX_EVENTS;
TxHeader.MessageMarker = 0x52;
CAN-FDを使う その2
- 25.
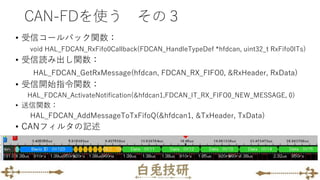
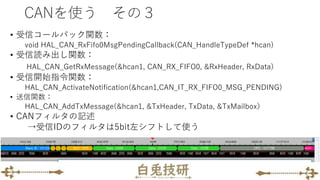
CAN-FDを使う その3
• 受信コールバック関数:
voidHAL_FDCAN_RxFifo0Callback(FDCAN_HandleTypeDef *hfdcan, uint32_t RxFifo0ITs)
• 受信読み出し関数:
HAL_FDCAN_GetRxMessage(hfdcan, FDCAN_RX_FIFO0, &RxHeader, RxData)
• 受信開始指令関数:
HAL_FDCAN_ActivateNotification(&hfdcan1,FDCAN_IT_RX_FIFO0_NEW_MESSAGE, 0)
• 送信関数:
HAL_FDCAN_AddMessageToTxFifoQ(&hfdcan1, &TxHeader, TxData)
• CANフィルタの記述
- 26.
- 27.
- 28.
- 29.






![CANを使う その2
• 用意する変数、構造体等
CAN_TxHeaderTypeDef TxHeader; 送信ハンドラー
CAN_RxHeaderTypeDef RxHeader; 受信ハンドラー
uint8_t TxData[8]; 送信データ配列
uint8_t RxData[8]; 受信データ配列
uint32_t TxMailbox; 送信箱
• 送信フィルタ
TxHeader.StdId = 0x456; 送信ID
TxHeader.RTR = CAN_RTR_DATA;
TxHeader.IDE = CAN_ID_STD;
TxHeader.DLC = 3; 送信byte数
TxHeader.TransmitGlobalTime = DISABLE;](https://image.slidesharecdn.com/stm32-190919091621/85/STM32-21-320.jpg)

![• 用意する変数
FDCAN_TxHeaderTypeDef TxHeader;
FDCAN_RxHeaderTypeDef RxHeader;
uint8_t TxData[50];
uint8_t RxData[50];
uint32_t TxMailbox;
• 送信フィルタ
TxHeader.Identifier = 0x123; →送信ID
TxHeader.IdType = FDCAN_STANDARD_ID;
TxHeader.TxFrameType = FDCAN_DATA_FRAME;
TxHeader.DataLength = FDCAN_DLC_BYTES_32; →32byte一気に送れる
TxHeader.ErrorStateIndicator = FDCAN_ESI_ACTIVE;
TxHeader.BitRateSwitch = FDCAN_BRS_ON;
TxHeader.FDFormat = FDCAN_FD_CAN;
TxHeader.TxEventFifoControl = FDCAN_STORE_TX_EVENTS;
TxHeader.MessageMarker = 0x52;
CAN-FDを使う その2](https://image.slidesharecdn.com/stm32-190919091621/85/STM32-24-320.jpg)