More Related Content

PDF
RaspberryPiとawsで取組んだ自作IoT 
PDF

PDF

PDF

PPTX

PDF

PDF

PDF
What's hot

ODP

PDF

PDF

PDF

PDF

PDF
Rubyを楽しくする第一歩!ブロックを理解する! 
PPTX
Similar to 第二回東海北陸ロボコン交流会 豊田高専プレゼン

ODP

PPTX

PDF
coma Study Room vol.2 Arduino Workshop 
PPTX

PPTX

PPTX
More from 東海北陸ロボコン 交流会

PPTX

PPTX

PPTX

PPTX

PPTX

PPTX

PPTX

PPTX

PPTX

PPTX

PPTX

PPTX

PPTX

PPTX

PPTX
第二回東海北陸ロボコン交流会 豊田高専プレゼン
- 1.
- 2.
- 3.
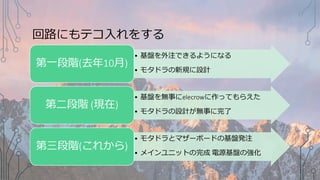
母体になるハードウェアどうしよう
結果
• ラズパイ +arduino
• 時代はやっぱラズパイ
• arduinoなら一年生でも速攻でプログラム書ける
• あとあと画像処理などの高度なことを実行する時に対応しやすい
• やれることがPIC以上になることにより5年間ぶりの技術革新
• ネット界隈でなんか人気だし参考文献いっぱい
• 見た目がなんかつよそう
- 4.
- 5.
- 6.
- 7.
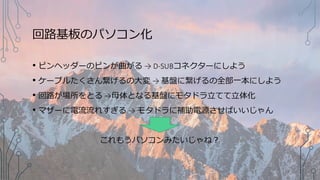
回路基板のパソコン化
• ピンヘッダーのピンが曲がる →D-SUBコネクターにしよう
• ケーブルたくさん繋げるの大変 → 基盤に繋げるの全部一本にしよう
• 回路が場所をとる →母体となる基盤にモタドラ立てて立体化
• マザーに電流流れすぎる → モタドラに補助電源させばいいじゃん
これもうパソコンみたいじゃね?
- 8.
- 9.
Editor's Notes
- #9 C++の授業が1年生からないため独学で学ぶ必要がある。これは、情報科にも言えることでC言語の授業が最低でも2年からしかない。電気科は3年の後期になってようやく。
- #12 Triple
- #14 いままでのことは、去年の上層で決めたことで、ここからが自分が現在していることです。
まず、基盤の外注ですが、ここが自分の中では一番の要として取り組みました。今の豊田Bの回路では、モデラーを使用して製作しているため、片面基盤しか製作できません。また、天命をまっとうされたのもありますが、モデラーの精度が落ちており、表面実装の基盤を製作が困難という問題がありました。これはモータードライバを製作するにも支障がでるため、早急に対処する必要があるという考えです。
また、既製品のモータードライバを買いましたが、今度は取り付けと配線が汚くなるという問題があり、こちらもできればどうにかしたいとなりました。