Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
東交
Uploaded by
東海北陸ロボコン 交流会
PPTX, PDF
1,550 views
富山本郷キャンパス-ロボット紹介
第一回東海北陸ロボコン交流会で行われた富山本郷キャンパスのロボット紹介です。
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 13
2
/ 13
3
/ 13
4
/ 13
5
/ 13
6
/ 13
7
/ 13
8
/ 13
9
/ 13
10
/ 13
11
/ 13
12
/ 13
13
/ 13
More Related Content
PPTX
MDの基本と応用について
by
東海北陸ロボコン 交流会
PDF
奈良高専-2016年度東北交流会発表資料
by
kawasetsu
PPTX
鈴鹿高専ロボコン 部活紹介と技術紹介
by
東海北陸ロボコン 交流会
PPTX
富山高専射水キャンパス ロボット紹介
by
東海北陸ロボコン 交流会
PPTX
岐阜高専A-ロボット紹介
by
東海北陸ロボコン 交流会
PPTX
岐阜高専B-ロボット紹介
by
東海北陸ロボコン 交流会
PPTX
プログラムの高速化
by
東海北陸ロボコン 交流会
PPT
モーターの独り言
by
Kodensha Co.,Ltd.
MDの基本と応用について
by
東海北陸ロボコン 交流会
奈良高専-2016年度東北交流会発表資料
by
kawasetsu
鈴鹿高専ロボコン 部活紹介と技術紹介
by
東海北陸ロボコン 交流会
富山高専射水キャンパス ロボット紹介
by
東海北陸ロボコン 交流会
岐阜高専A-ロボット紹介
by
東海北陸ロボコン 交流会
岐阜高専B-ロボット紹介
by
東海北陸ロボコン 交流会
プログラムの高速化
by
東海北陸ロボコン 交流会
モーターの独り言
by
Kodensha Co.,Ltd.
Viewers also liked
PPTX
僕とロボコン
by
Noriki Nakamura
PDF
OpenCVを用いたロボコンにおける画像処理(2013年ロボコン交流会)
by
Yuma Yoshimoto
PDF
Deep Learningを用いたロボット制御
by
Ryosuke Okuta
PPTX
沼津高専ロボコン部 部活動紹介
by
東海北陸ロボコン 交流会
PDF
技官のお仕事(仮) [The Work of Technical Staff & Principles of fuel cells]
by
Jun Sato
PPTX
無線LANでロボットを動かす話
by
Hisaya Okada
PPTX
C#/Java & Linux で始める ET ロボコン(leJOS編)
by
Minoru Inachi
PDF
元高専生が高専に戻るまで
by
kosenconf012hachinohe
PDF
Twitterの高専クラスタを頑張って可視化してみる
by
futada
PDF
ネトゲで人生を変えたい
by
Eric Sartre
PDF
私の失敗道(仮)
by
Yuuki Tan-nai
ODP
ぼくとしりとりの約3.0*10^3日間戦争
by
Eric Sartre
PDF
やさしい日本語言い換えシステムを支える技術
by
Eric Sartre
PDF
高専OBならではの勉強法
by
Y Yazee
PDF
「わからない」との付き合い方
by
Eric Sartre
僕とロボコン
by
Noriki Nakamura
OpenCVを用いたロボコンにおける画像処理(2013年ロボコン交流会)
by
Yuma Yoshimoto
Deep Learningを用いたロボット制御
by
Ryosuke Okuta
沼津高専ロボコン部 部活動紹介
by
東海北陸ロボコン 交流会
技官のお仕事(仮) [The Work of Technical Staff & Principles of fuel cells]
by
Jun Sato
無線LANでロボットを動かす話
by
Hisaya Okada
C#/Java & Linux で始める ET ロボコン(leJOS編)
by
Minoru Inachi
元高専生が高専に戻るまで
by
kosenconf012hachinohe
Twitterの高専クラスタを頑張って可視化してみる
by
futada
ネトゲで人生を変えたい
by
Eric Sartre
私の失敗道(仮)
by
Yuuki Tan-nai
ぼくとしりとりの約3.0*10^3日間戦争
by
Eric Sartre
やさしい日本語言い換えシステムを支える技術
by
Eric Sartre
高専OBならではの勉強法
by
Y Yazee
「わからない」との付き合い方
by
Eric Sartre
More from 東海北陸ロボコン 交流会
PPTX
岐阜Bノブちゃんズ
by
東海北陸ロボコン 交流会
PPTX
mbedのすゝめ(追加バージョン)
by
東海北陸ロボコン 交流会
PPTX
第二回東海北陸ロボコン交流会 関口プレゼン
by
東海北陸ロボコン 交流会
PPTX
第二回東海北陸ロボコン交流会 豊田高専プレゼン
by
東海北陸ロボコン 交流会
PPTX
富山高専射水キャンパス
by
東海北陸ロボコン 交流会
PPTX
第二回東海北陸ロボコン交流会 井木プレゼン
by
東海北陸ロボコン 交流会
PPTX
第二回東海北陸ロボコン交流会 鈴鹿高専プレゼン
by
東海北陸ロボコン 交流会
PPTX
第二回東海北陸ロボコン交流会 川上プレゼン
by
東海北陸ロボコン 交流会
岐阜Bノブちゃんズ
by
東海北陸ロボコン 交流会
mbedのすゝめ(追加バージョン)
by
東海北陸ロボコン 交流会
第二回東海北陸ロボコン交流会 関口プレゼン
by
東海北陸ロボコン 交流会
第二回東海北陸ロボコン交流会 豊田高専プレゼン
by
東海北陸ロボコン 交流会
富山高専射水キャンパス
by
東海北陸ロボコン 交流会
第二回東海北陸ロボコン交流会 井木プレゼン
by
東海北陸ロボコン 交流会
第二回東海北陸ロボコン交流会 鈴鹿高専プレゼン
by
東海北陸ロボコン 交流会
第二回東海北陸ロボコン交流会 川上プレゼン
by
東海北陸ロボコン 交流会
Recently uploaded
PDF
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
PDF
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
PDF
maisugimoto_曖昧さを含む仕様書の改善を目的としたアノテーション支援ツールの検討_HCI2025.pdf
by
Matsushita Laboratory
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
PDF
TomokaEdakawa_職種と講義の関係推定に基づく履修支援システムの基礎検討_HCI2026
by
Matsushita Laboratory
PDF
アジャイル導入が止まる3つの壁 ─ 文化・他部門・組織プロセスをどう乗り越えるか
by
Graat(グラーツ)
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
maisugimoto_曖昧さを含む仕様書の改善を目的としたアノテーション支援ツールの検討_HCI2025.pdf
by
Matsushita Laboratory
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
TomokaEdakawa_職種と講義の関係推定に基づく履修支援システムの基礎検討_HCI2026
by
Matsushita Laboratory
アジャイル導入が止まる3つの壁 ─ 文化・他部門・組織プロセスをどう乗り越えるか
by
Graat(グラーツ)
富山本郷キャンパス-ロボット紹介
1.
HON50 ロボット紹介 二年機械班 窪田太一 二年電気班 吉田岳 富山高専本郷キャンパス
2.
ロボットコンセプト コンセプトは「シンプルで強いロボット」 富山高専の創立50周年記念にちなんで神輿,祭りをイメージ 操縦者
3.
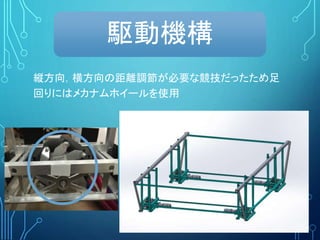
駆動機構 縦方向,横方向の距離調節が必要な競技だったため足 回りにはメカナムホイールを使用
4.
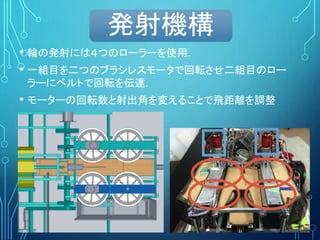
発射機構 • 輪の発射には4つのローラーを使用. • 一組目を二つのブラシレスモータで回転させ二組目のロー ラーにベルトで回転を伝達. •
モーターの回転数と射出角を変えることで飛距離を調整
5.
ローラー 木の合板をバンドソーで丸く切る ↓ 旋盤で仕上げる ↓ ゴムを切って貼り木ねじで固定 • モーターにはGFORCEの ブラシレスモーターを使用 • タミヤのギヤヘッドを使用し, 10:1に減速している
6.
射出角の調整 すべりねじを用いた機構に変更 射出角の調整には最初は ウォームギアを使用 負荷が大きくギアボックス の強度が足りない・・・
7.
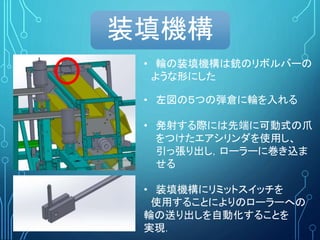
装填機構 • 輪の装填機構は銃のリボルバーの ような形にした • 左図の5つの弾倉に輪を入れる •
発射する際には先端に可動式の爪 をつけたエアシリンダを使用し、 引っ張り出し,ローラーに巻き込ま せる • 装填機構にリミットスイッチを 使用することによりのローラーへの 輪の送り出しを自動化することを 実現.
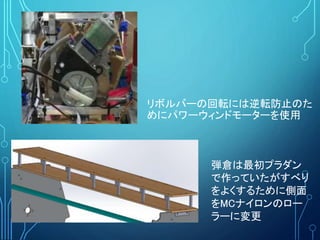
8.
リボルバーの回転には逆転防止のた めにパワーウィンドモーターを使用 弾倉は最初プラダン で作っていたがすべり をよくするために側面 をMCナイロンのロー ラーに変更
9.
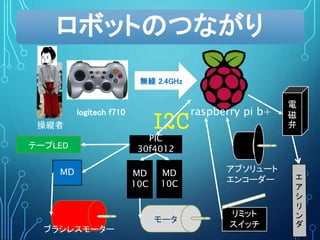
ロボットのつながり logitech f710 raspberry
pi b+ 無線 2.4GHz 操縦者 I2C PIC 30f4012 MD 10C MD 10C モータ ブラシレスモーター テープLED リミット スイッチ アブソリュート エンコーダー 電 磁 弁 MD
10.
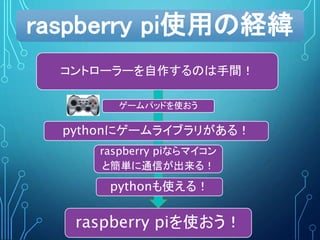
raspberry pi使用の経緯 コントローラーを自作するのは手間! ゲームパッドを使おう pythonにゲームライブラリがある! raspberry piならマイコン と簡単に通信が出来る! pythonも使える! raspberry
piを使おう!
11.
raspiについて • raspberry piのプログラミングには python2.7を使用 •
設定ファイルを作り,だれでも容易に 使用できる • 容易に自作クラスをimportできること を生かし、作業を分担 • エラーファイルにログを残し、デバック の簡単化 • IOピンを使い、picとI2C通信を用いる ことで、機能拡充が容易
12.
前大会の戦績 東海北陸地区大会にて一回戦で 鈴鹿高専メカロンと激突 結果敗北するも スポンサーの安川電機さんから安川賞を受賞
13.
ご清聴ありがとうございました
Download
















![技官のお仕事(仮) [The Work of Technical Staff & Principles of fuel cells]](https://cdn.slidesharecdn.com/ss_thumbnails/009tokyo-100204165527-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
























