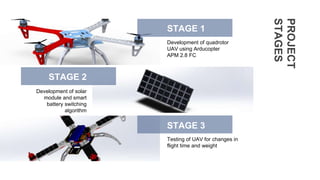
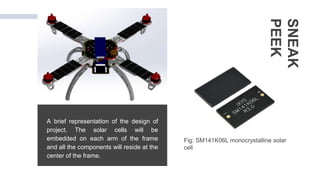
This document provides details about a project to design and fabricate a solar-powered quadcopter drone (SPQD). The project aims to extend the drone's flight time by utilizing solar cells embedded on the drone's arms to generate electrical energy. The objectives are to evaluate changes in flight time and weight with and without solar cells and to develop a quadcopter using an Ardupilot flight controller. The goals are to demonstrate the feasibility of using solar-powered quadcopters for applications like surveillance and to develop more sustainable drones. The project will be carried out in stages including developing the solar charging module, building the quadcopter, and testing changes in flight time and weight.


















































![sooooo final[1][1].pptx kfofojrjrkfoogokgkgkg](https://cdn.slidesharecdn.com/ss_thumbnails/sooooofinal11-250729172231-f2bd177d-thumbnail.jpg?width=640&height=640&fit=bounds)





















