LES PROJECCIONS
↑ Pladel Quadre ↑
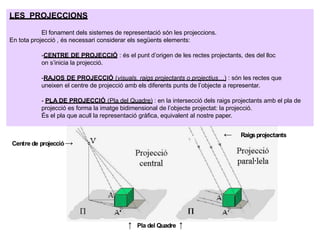
El fonament dels sistemes de representació són les projeccions.
En tota projecció , és necessari considerar els següents elements:
-CENTRE DE PROJECCIÓ : és el punt d’origen de les rectes projectants, des del lloc
on s’inicia la projecció.
-RAJOS DE PROJECCIÓ (visuals, raigs projectants o projectius…) : són les rectes que
uneixen el centre de projecció amb els diferents punts de l’objecte a representar.
- PLA DE PROJECCIÓ (Pla del Quadre) : en la intersecció dels raigs projectants amb el pla de
projecció es forma la imatge bidimensional de l’objecte projectat: la projecció.
És el pla que acull la representació gràfica, equivalent al nostre paper.
← Raigs projectants
Centre de projecció→
3.
TIPUS DE PROJECCIÓ
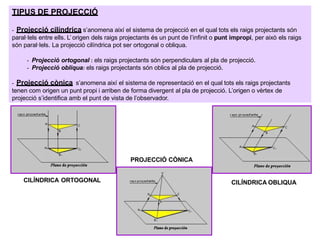
-Projecció cilíndrica s’anomena així el sistema de projecció en el qual tots els raigs projectants són
paral·lels entre ells. L’ origen dels raigs projectants és un punt de l’infinit o punt impropi, per això els raigs
són paral·lels. La projecció cilíndrica pot ser ortogonal o obliqua.
- Projecció ortogonal : els raigs projectants són perpendiculars al pla de projecció.
- Projecció obliqua: els raigs projectants són oblics al pla de projecció.
- Projecció cònica s’anomena així el sistema de representació en el qual tots els raigs projectants
tenen com origen un punt propi i arriben de forma divergent al pla de projecció. L’origen o vèrtex de
projecció s’identifica amb el punt de vista de l’observador.
CILÍNDRICA ORTOGONAL CILÍNDRICA OBLIQUA
PROJECCIÓ CÒNICA
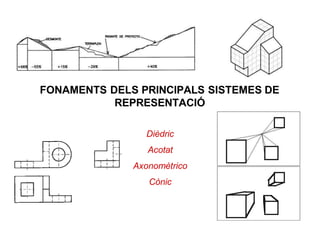
4.
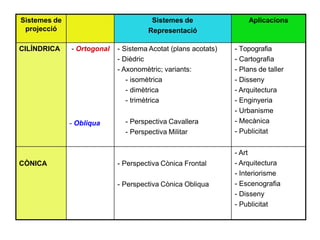
Sistemes de
projecció
Sistemes de
Representació
Aplicacions
CILÍNDRICA- Ortogonal
- Obliqua
- Sistema Acotat (plans acotats)
- Dièdric
- Axonomètric; variants:
- isomètrica
- dimètrica
- trimètrica
- Perspectiva Cavallera
- Perspectiva Militar
- Topografia
- Cartografia
- Plans de taller
- Disseny
- Arquitectura
- Enginyeria
- Urbanisme
- Mecànica
- Publicitat
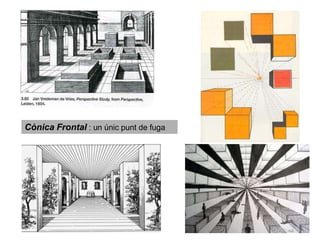
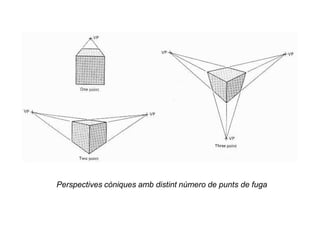
CÒNICA - Perspectiva Cònica Frontal
- Perspectiva Cònica Obliqua
- Art
- Arquitectura
- Interiorisme
- Escenografia
- Disseny
- Publicitat
5.
Tipus i característiquesdels sistemes de representació
Els sistemes de representació es classifiquen en dos grans grups:
- Sistemes de mesura, caracteritzats per la possibilitat de poder mesurar directament sobre el
dibuix per obtenir les dimensions i posició dels objectes de manera ràpida i senzilla. L’inconvenient que
tenen és que no pot apreciar-se ràpidament la forma i les proporcions dels objectes representats.
- Sistemes representatius, representen els objectes amb una única projecció, en un colp d’ull
s’aprecia la forma i proporcions dels objectes. L’inconvenient que tenen és que són més difícils de
realitzar, especialment si tenen corbes, i sovint no és possible de manera directa (hi ha deformacions
formals)
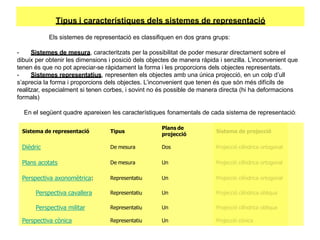
En el següent quadre apareixen les característiques fonamentals de cada sistema de representació:
Sistema de representació Tipus
Plans de
projecció
Sistema de projecció
Dièdric De mesura Dos Projecció cilíndrica ortogonal
Plans acotats De mesura Un Projecció cilíndrica ortogonal
Perspectiva axonomètrica: Representatiu Un Projecció cilíndrica ortogonal
Perspectiva cavallera Representatiu Un Projecció cilíndrica obliqua
Perspectiva militar Representatiu Un Projecció cilíndrica obliqua
Perspectiva cònica Representatiu Un Projecció cònica
6.
Si els destinatarisde la informació transmesa a través de projeccions no estan familiaritzats
amb aquest tipus d’imatges, la representació en perspectiva esdevé indispensable perquè la informació
gràfica (plana) siga interpretada correctament. La representació en perspectiva recrea i suggereix la
aparença volumètrica de la figura, ès més fàcil la seua interpretació i comprensió.
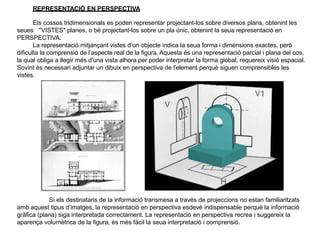
REPRESENTACIÓ EN PERSPECTIVA
Els cossos tridimensionals es poden representar projectant-los sobre diversos plans, obtenint les
seues "VISTES" planes, o bé projectant-los sobre un pla únic, obtenint la seua representació en
PERSPECTIVA.
La representació mitjançant vistes d’un objecte indica la seua forma i dimensions exactes, però
dificulta la comprensió de l’aspecte real de la figura. Aquesta és una representació parcial i plana del cos,
la qual obliga a llegir més d’una vista alhora per poder interpretar la forma global; requereix visió espacial.
Sovint és necessari adjuntar un dibuix en perspectiva de l’element perquè siguen comprensibles les
vistes.
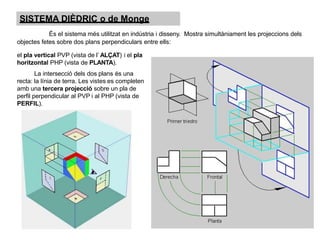
SISTEMA DIÈDRIC ode Monge
És el sistema més utilitzat en indústria i disseny. Mostra simultàniament les projeccions dels
objectes fetes sobre dos plans perpendiculars entre ells:
el pla vertical PVP (vista de l’ ALÇAT) i el pla
horitzontal PHP (vista de PLANTA).
La intersecció dels dos plans és una
recta: la línia de terra. Les vistes es completen
amb una tercera projecció sobre un pla de
perfil perpendicular al PVP i al PHP (vista de
PERFIL).
10.
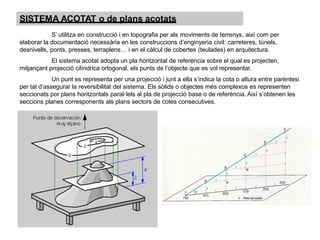
SISTEMA ACOTAT ode plans acotats
S’ utilitza en construcció i en topografia per als moviments de terrenys, així com per
elaborar la documentació necessària en les construccions d’enginyeria civil: carreteres, túnels,
desnivells, ponts, presses, terraplens… i en el càlcul de cobertes (teulades) en arquitectura.
El sistema acotat adopta un pla horitzontal de referència sobre el qual es projecten,
mitjançant projecció cilíndrica ortogonal, els punts de l’objecte que es vol representar.
Un punt es representa per una projecció i junt a ella s’indica la cota o altura entre parèntesi
per tal d’assegurar la reversibilitat del sistema. Els sòlids o objectes més complexos es representen
seccionats por plans horitzontals paral·lels al pla de projecció base o de referència. Així s’obtenen les
seccions planes corresponents als plans sectors de cotes consecutives.
11.
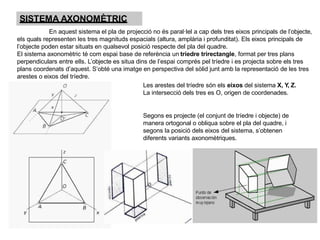
SISTEMA AXONOMÈTRIC
En aquestsistema el pla de projecció no és paral·lel a cap dels tres eixos principals de l’objecte,
els quals representen les tres magnituds espacials (altura, amplària i profunditat). Els eixos principals de
l’objecte poden estar situats en qualsevol posició respecte del pla del quadre.
El sistema axonomètric té com espai base de referència un tríedre trirectangle, format per tres plans
perpendiculars entre ells. L’objecte es situa dins de l’espai comprés pel tríedre i es projecta sobre els tres
plans coordenats d’aquest. S’obté una imatge en perspectiva del sòlid junt amb la representació de les tres
arestes o eixos del tríedre.
Les arestes del tríedre són els eixos del sistema X, Y, Z.
La intersecció dels tres es O, origen de coordenades.
Segons es projecte (el conjunt de tríedre i objecte) de
manera ortogonal o obliqua sobre el pla del quadre, i
segons la posició dels eixos del sistema, s’obtenen
diferents variants axonomètriques.
12.
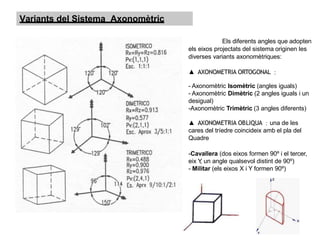
Variants del SistemaAxonomètric
Els diferents angles que adopten
els eixos projectats del sistema originen les
diverses variants axonomètriques:
▲ AXONOMETRIA ORTOGONAL :
- Axonomètric Isomètric (angles iguals)
- Axonomètric Dimètric (2 angles iguals i un
desigual)
-Axonomètric Trimètric (3 angles diferents)
▲ AXONOMETRIA OBLIQUA : una de les
cares del tríedre coincideix amb el pla del
Quadre
-Cavallera (dos eixos formen 90º i el tercer,
eix Y
, un angle qualsevol distint de 90º)
- Militar (els eixos X i Y formen 90º)
13.
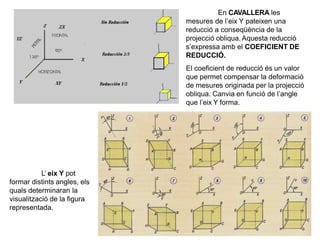
En CAVALLERA les
mesuresde l’eix Y pateixen una
reducció a conseqüència de la
projecció obliqua. Aquesta reducció
s’expressa amb el COEFICIENT DE
REDUCCIÓ.
El coeficient de reducció és un valor
que permet compensar la deformació
de mesures originada per la projecció
obliqua. Canvia en funció de l’angle
que l’eix Y forma.
L’ eix Y pot
formar distints angles, els
quals determinaran la
visualització de la figura
representada.
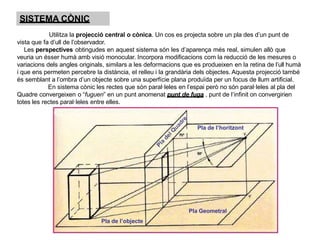
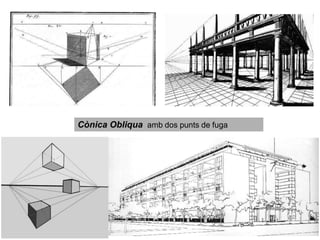
SISTEMA CÒNIC
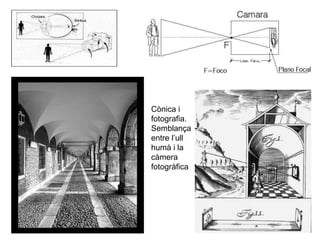
Utilitza laprojecció central o cònica. Un cos es projecta sobre un pla des d’un punt de
vista que fa d’ull de l’observador.
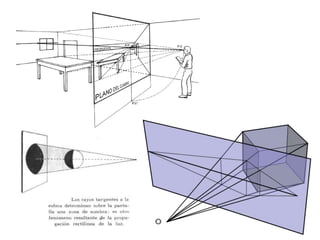
Les perspectives obtingudes en aquest sistema són les d’aparença més real, simulen allò que
veuria un ésser humà amb visió monocular. Incorpora modificacions com la reducció de les mesures o
variacions dels angles originals, similars a les deformacions que es produeixen en la retina de l’ull humà
i que ens permeten percebre la distància, el relleu i la grandària dels objectes. Aquesta projecció també
és semblant a l’ombra d’un objecte sobre una superfície plana produïda per un focus de llum artificial.
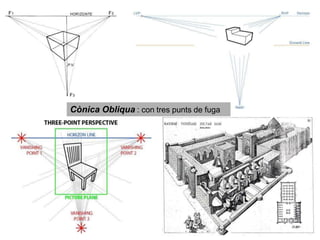
En sistema cònic les rectes que són paral·leles en l’espai però no són paral·leles al pla del
Quadre convergeixen o “fuguen” en un punt anomenat punt de fuga , punt de l’infinit on convergirien
totes les rectes paral·leles entre elles.
Pla de l’horitzont
Pla Geometral
Pla de l’objecte