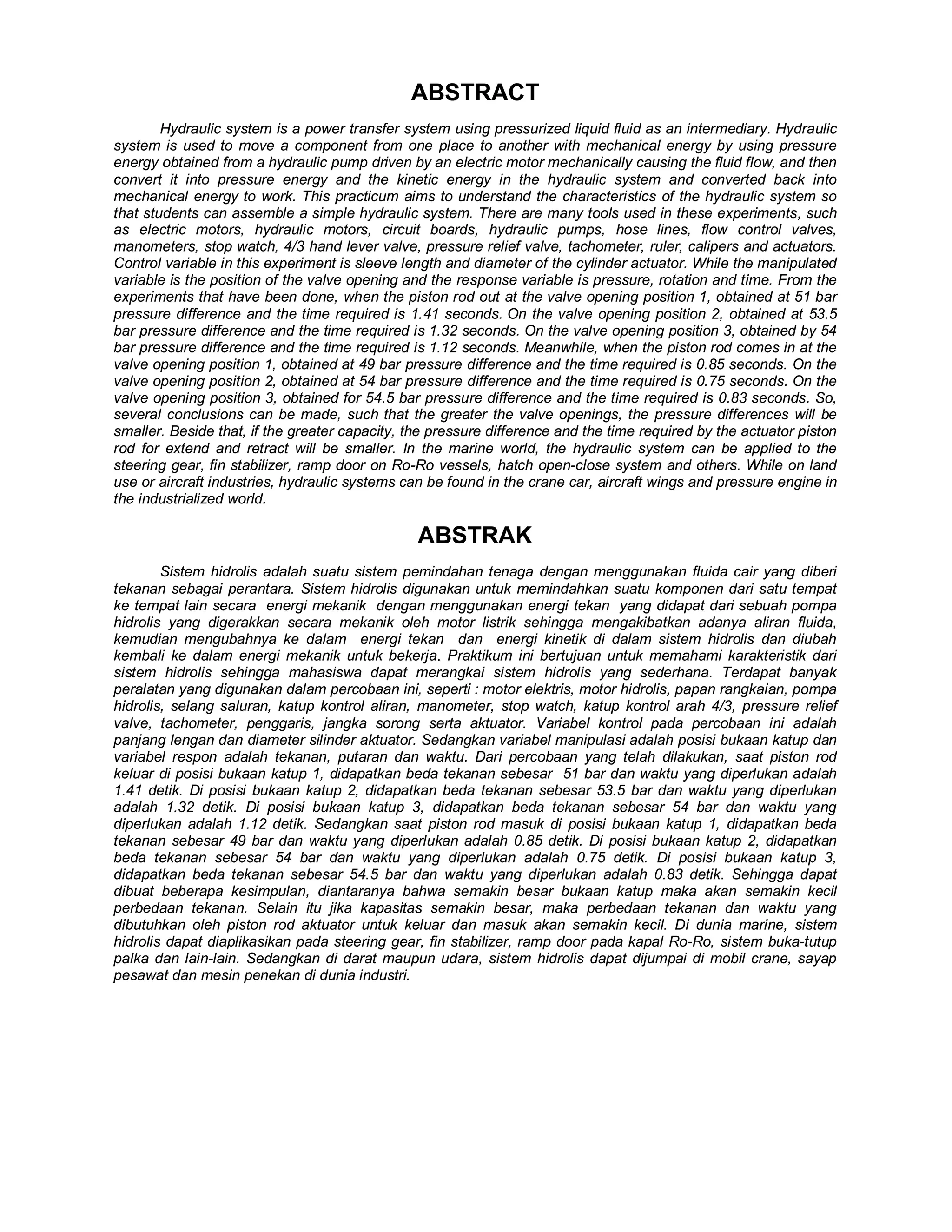
Sistem hidrolis adalah sistem pemindahan tenaga menggunakan fluida cair bertekanan yang mengubah energi mekanik melalui pompa hidrolis. Praktikum bertujuan memahami karakteristik sistem hidrolis termasuk variabel kontrol, manipulasi, dan respons pada tekanan, rotasi, dan waktu serta penerapan sistem di berbagai industri. Kesimpulan menunjukkan bahwa semakin besar bukaan katup, perbedaan tekanan semakin kecil, dan sistem ini memiliki aplikasi luas di industri maritim dan darat.






![Gambar I.12. Viskositas Zat Cair
(sumber :http://ediblesciencefaire.files.wordpress.comscience_viscosity.jpg)
Adapun didalam satuan internasional (SI) satuan viskositas ditetapkan sebagai viskositas kinematik
yang besarnya dipengaruhi oleh temperature (T). Berikut ini adalah persamaannya.
=
Keterangan :
= viskositas kinematik ( c ⁄ )
= rapat massa/ massa jenis ( ⁄ )
= viskositas dinamis ( . ⁄ )
(Tim Lab. Mesflu dan Sistem, Modul Praktikum Mesflu dan Sistem 2011)
5. Hukum Kontinuitas
Fluida yang mengalir melalui suatu penampang akan selalau memenuhi hukum kontinuitas yaitu laju
massa fluida yang masuk ̇ akan selalau sama dengan laju massa fluida yang keluar ̇ .
Gambar I.13. Ilustrasi Hukum Kontinuitas
(sumber : http://4.bp.blogspot.com/persamaan+kontinuitas.jpg)
Persamaan kontinuitas adalah sebagai berikut :
̇ = ̇
[ ] = [ ]
Untuk aliran fluida cair (takmampu-mampat), maka = sehingga :
[ ] = [ ]
=
Keterangan :
, = kapasitas fluida (masuk, keluar) ( m3
/s )
, = massa jenis fluida (masuk, keluar) (kg/m
3
)
, = luas penampang (masuk, keluar) ( m
2
)
, = kecepatan aliran fluida (masuk, keluar) ( m/s )
(Tim Lab. Mesflu dan Sistem, Modul Praktikum Mesflu dan Sistem 2011)](https://image.slidesharecdn.com/sistemhidroliskel5-151004092028-lva1-app6891/85/Sistem-hidrolis-kel5-7-320.jpg)















































![AUTOMASI_HIDROLIK KONTROL SISTEM-T.A Ganjil 2024-2025-[Inong Oskar].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/automasihidrolikkontrolsistem-t-241127115832-60ea8aae-thumbnail.jpg?width=640&height=640&fit=bounds)
![AUTOMASI_HIDROLIK KONTROL SISTEM-T.A Ganjil 2024-2025-[Inong Oskar].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/automasihidrolikkontrolsistem-t-241127114502-720652f9-thumbnail.jpg?width=640&height=640&fit=bounds)







![Sistem hidrolik[1]](https://cdn.slidesharecdn.com/ss_thumbnails/sistemhidrolik1-131124165330-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



