Downloaded 22 times
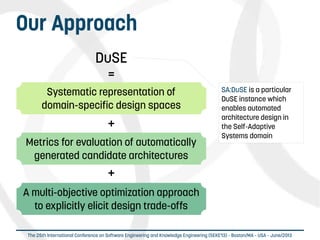
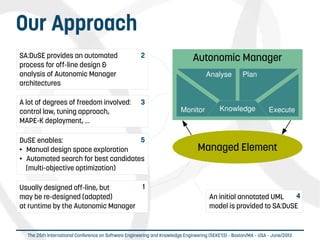
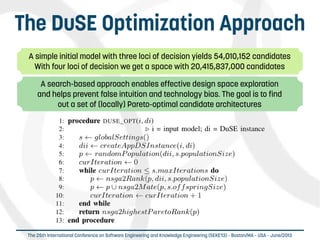
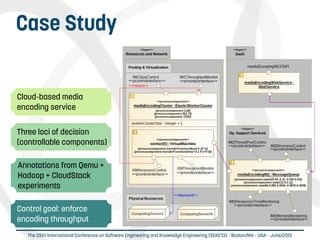
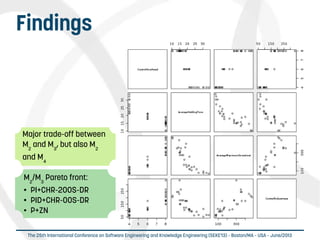
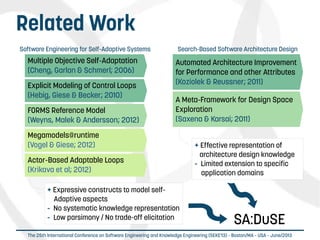

The document presents a systematic approach for designing self-adaptive systems through a domain-specific design space called sa:duse, which employs multi-objective optimization for automatic architecture generation. The authors address challenges of architectural complexity and propose a method to evaluate design trade-offs in order to enhance system flexibility and performance. A case study involving a cloud-based media encoding service illustrates the effectiveness of the sa:duse approach in achieving specific control goals.