Download as PDF, PPTX

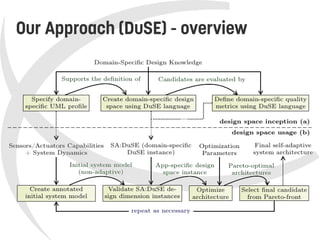
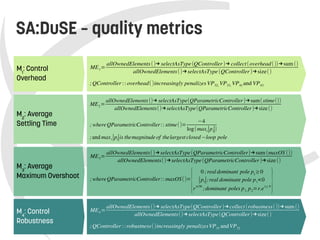
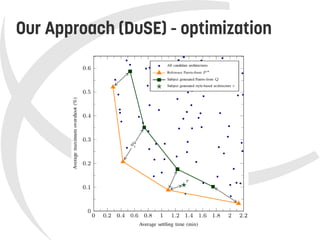
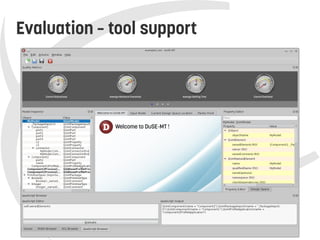

This document presents a model-based approach called DuSE for evaluating trade-offs between feedback control architectures in autonomic systems. DuSE combines metamodeling, design spaces, quality metrics, and multi-objective optimization to enable more disciplined and automated design of autonomic systems. It represents autonomic systems design knowledge systematically and supports informed decision making regarding quality attribute trade-offs. DuSE was evaluated using real prototypes and experiments, finding that autonomic systems design is a multi-objective problem and search-based approaches can improve design.





















































