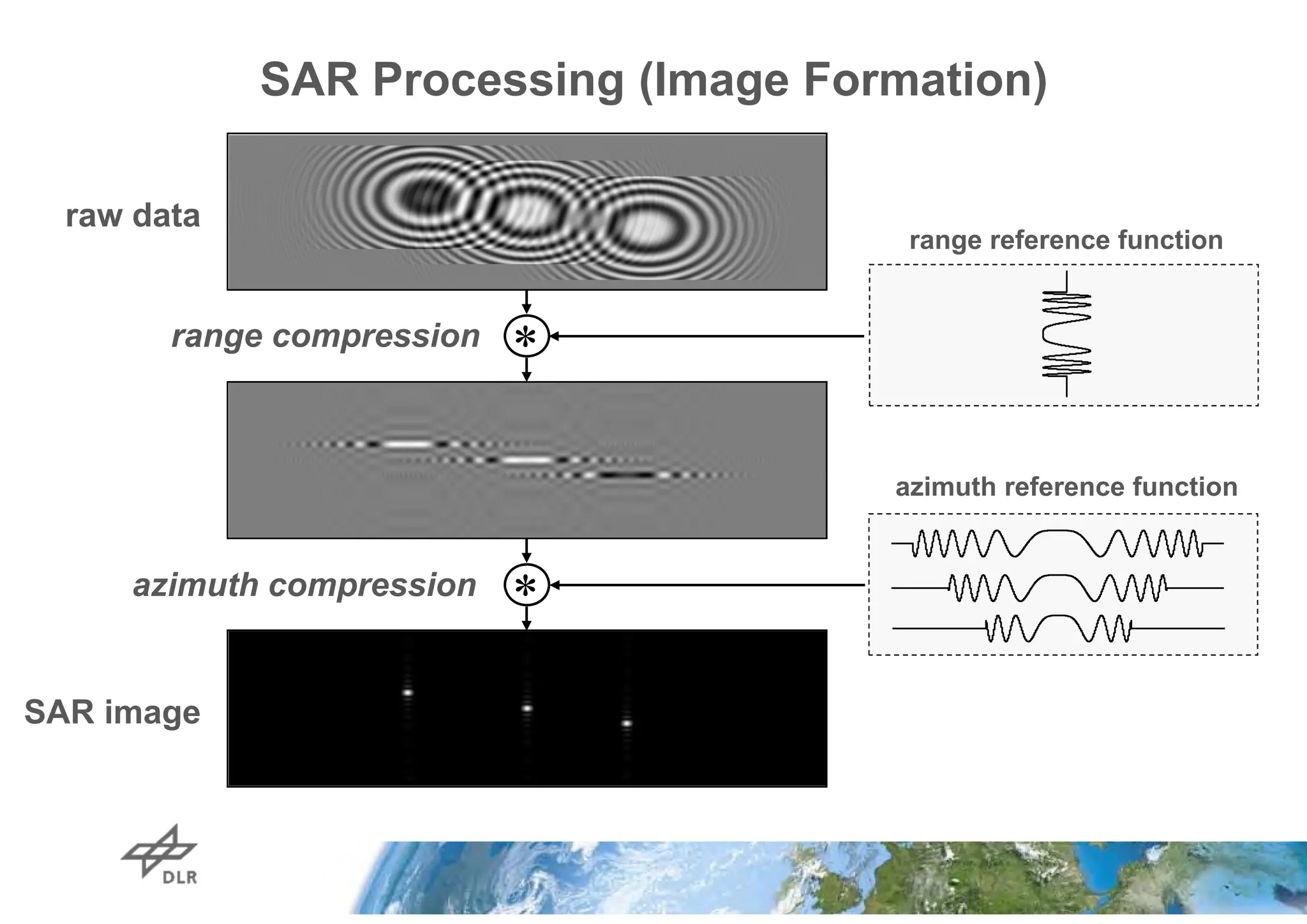
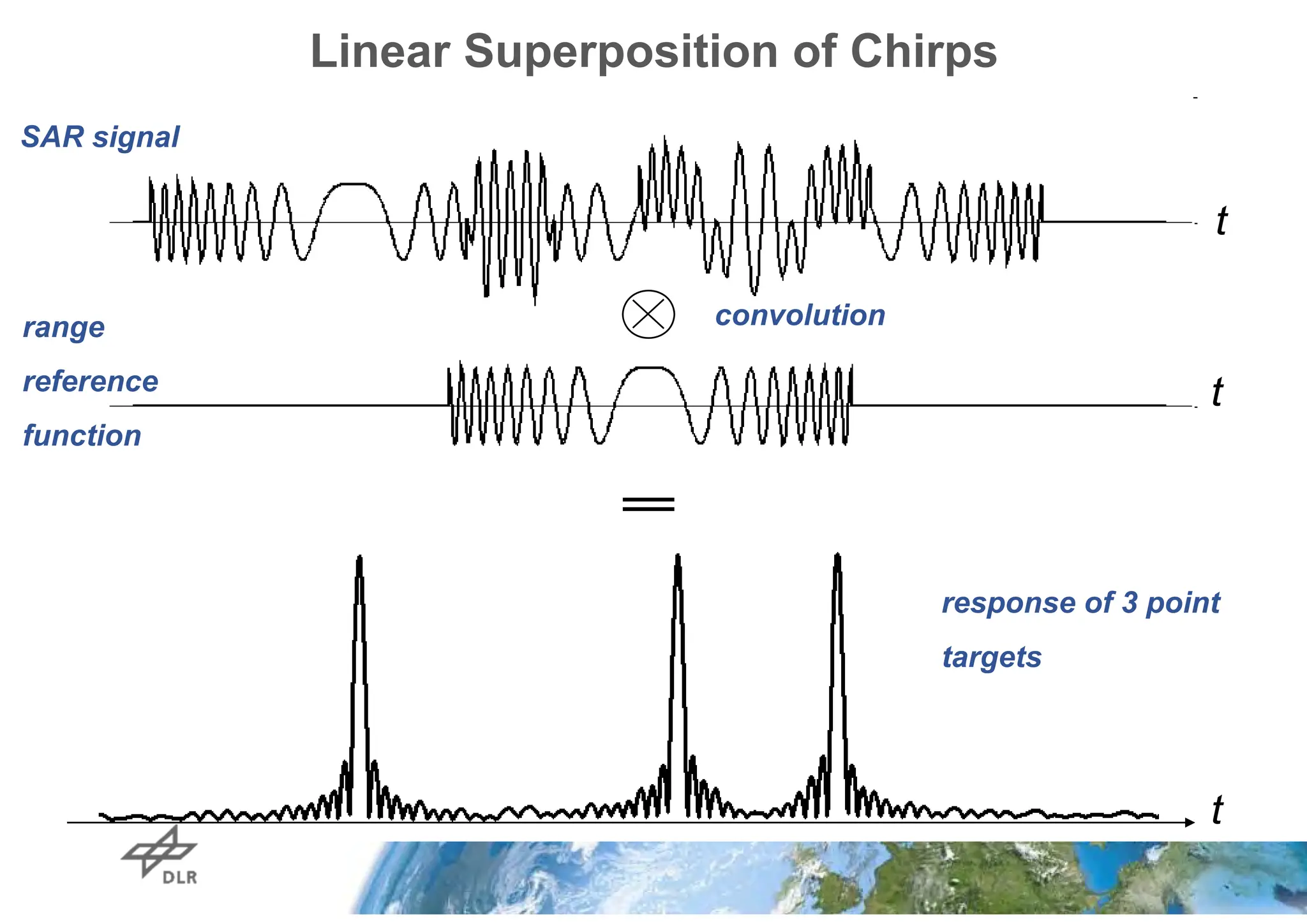
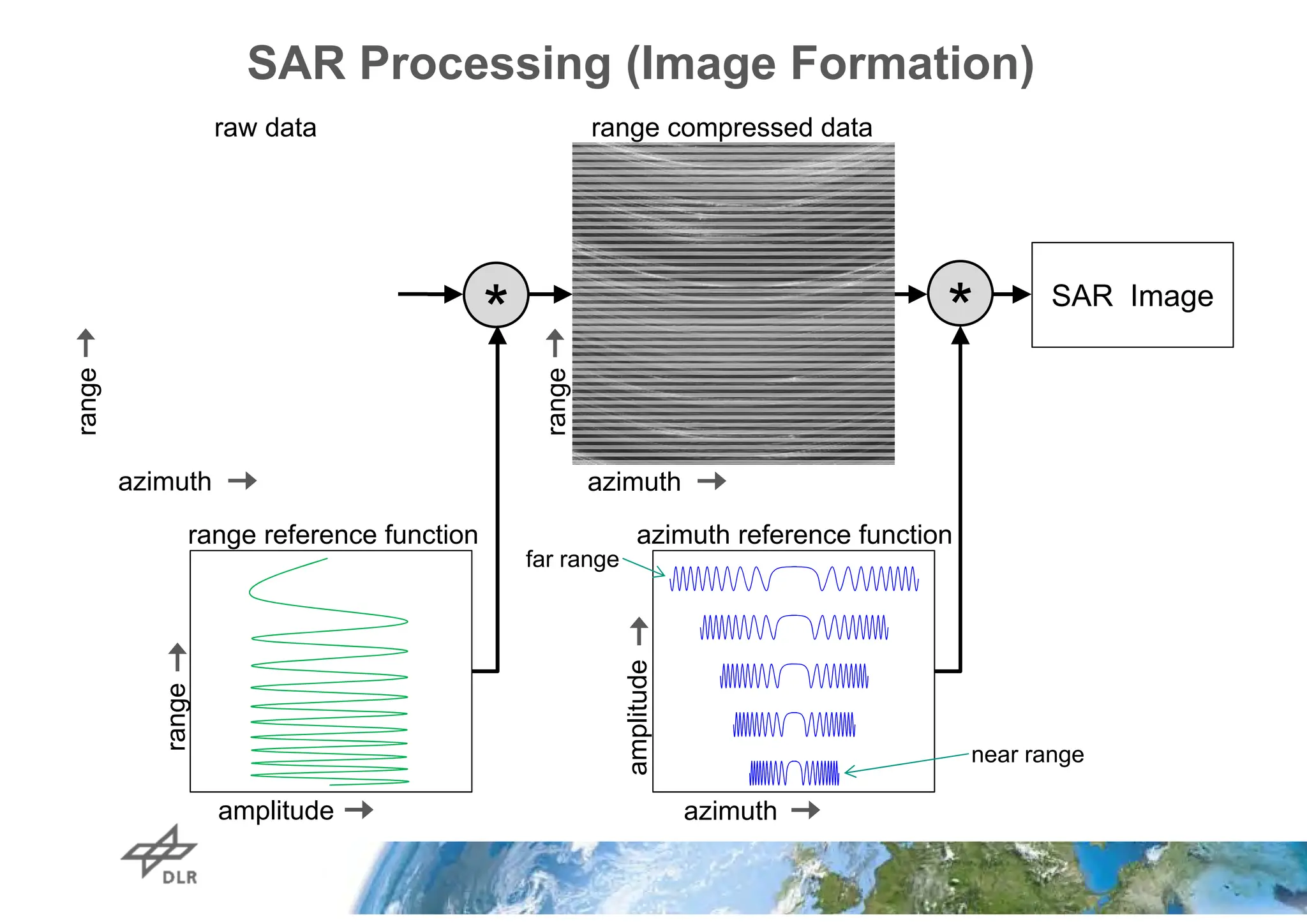
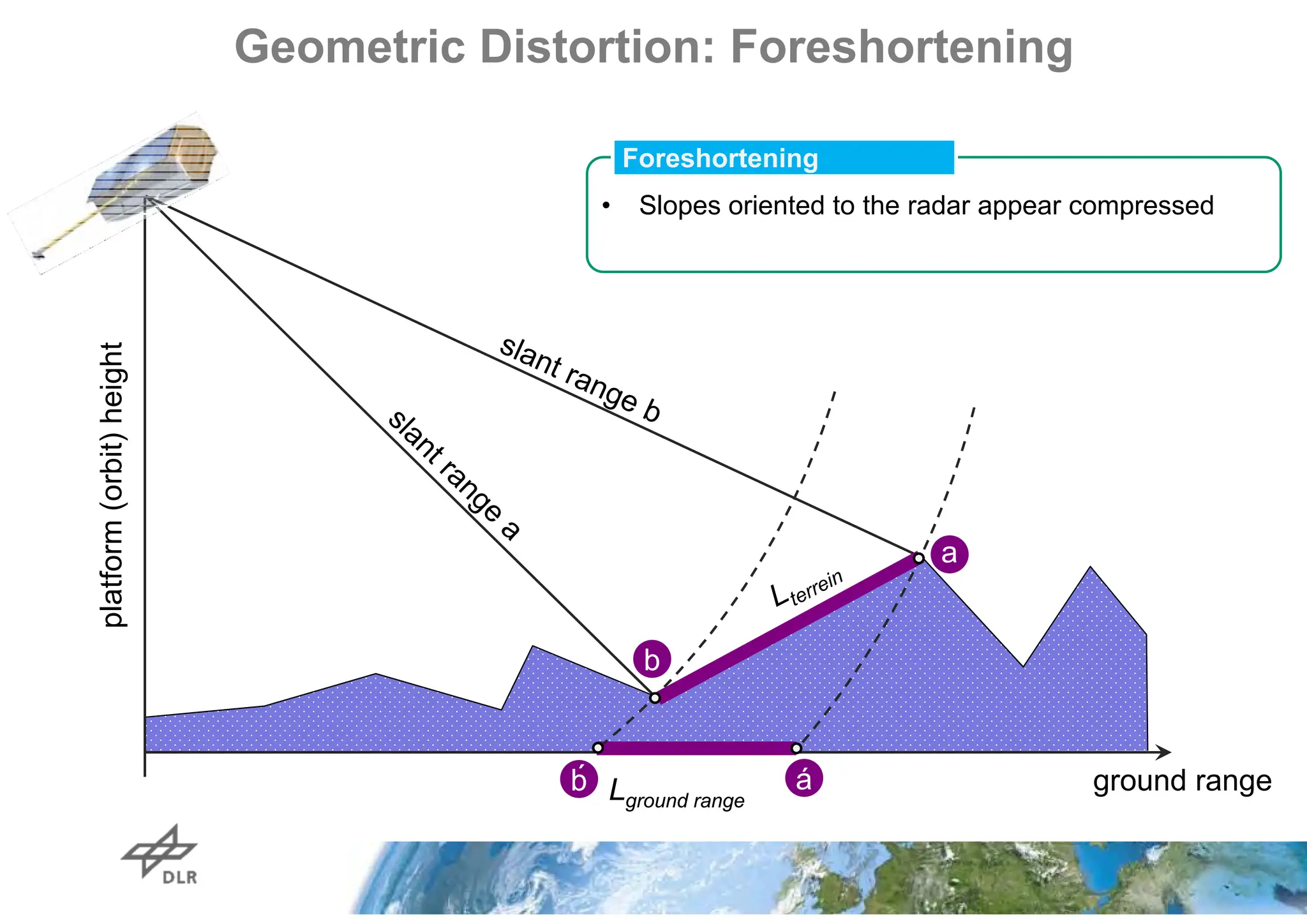
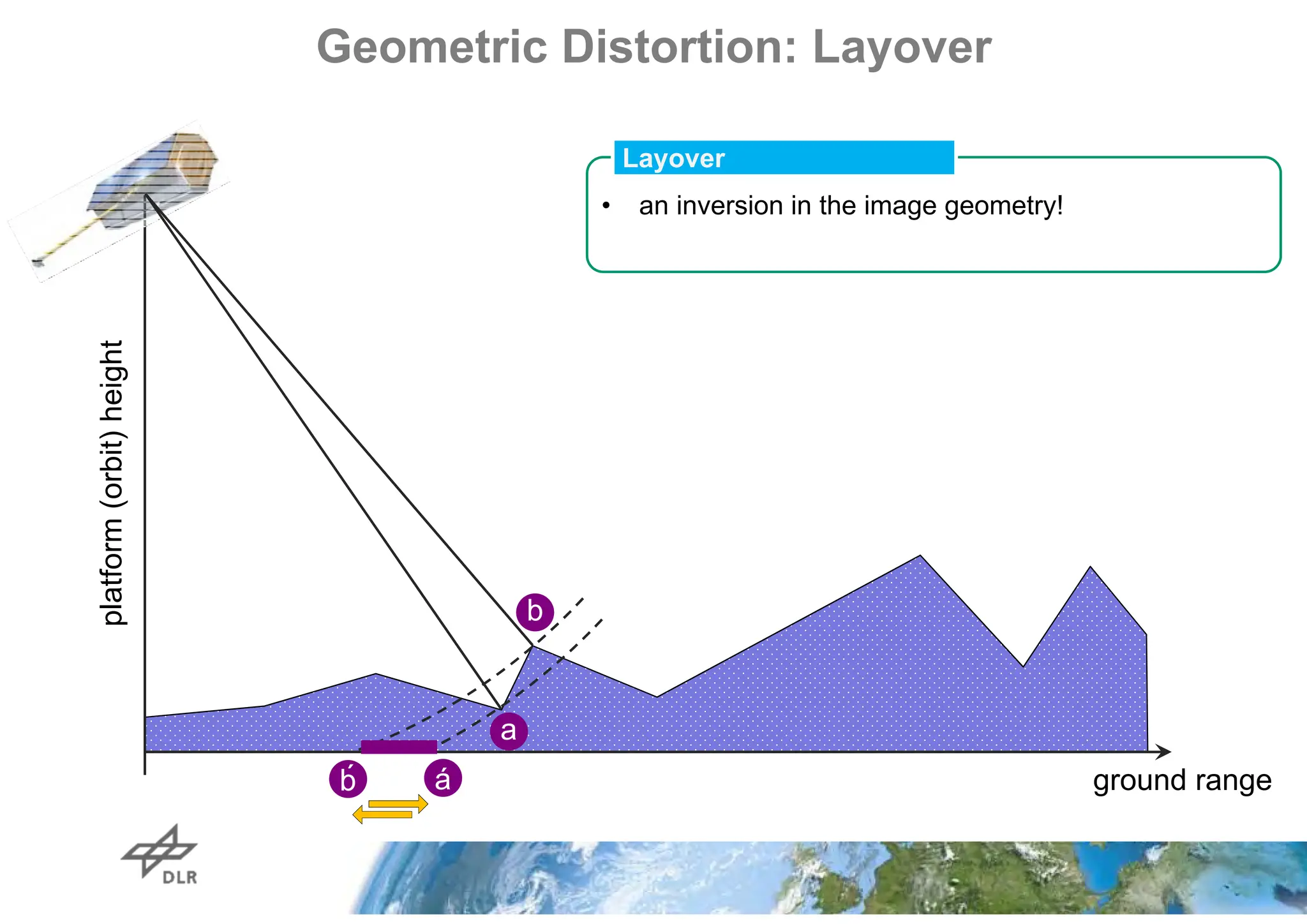
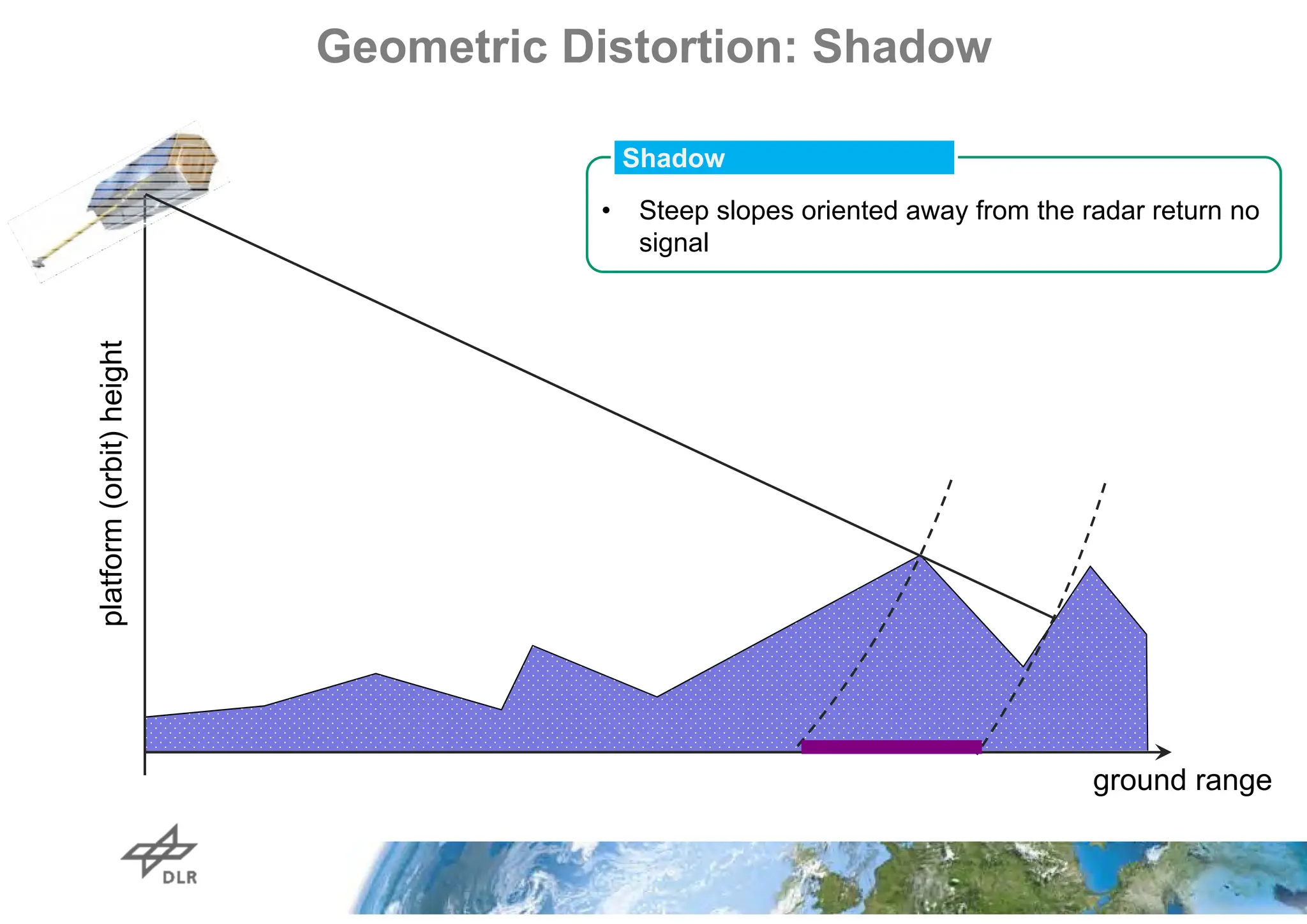
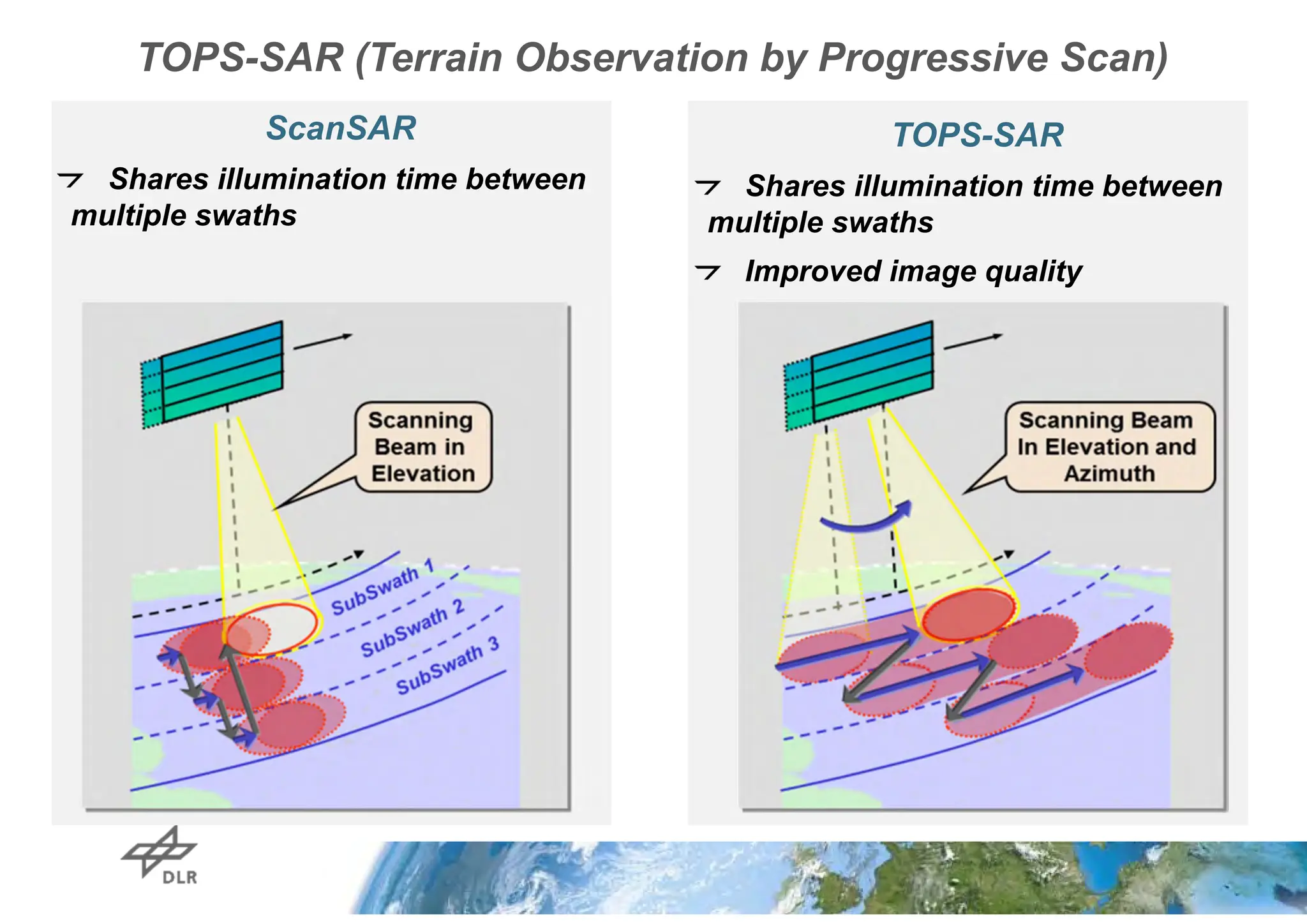
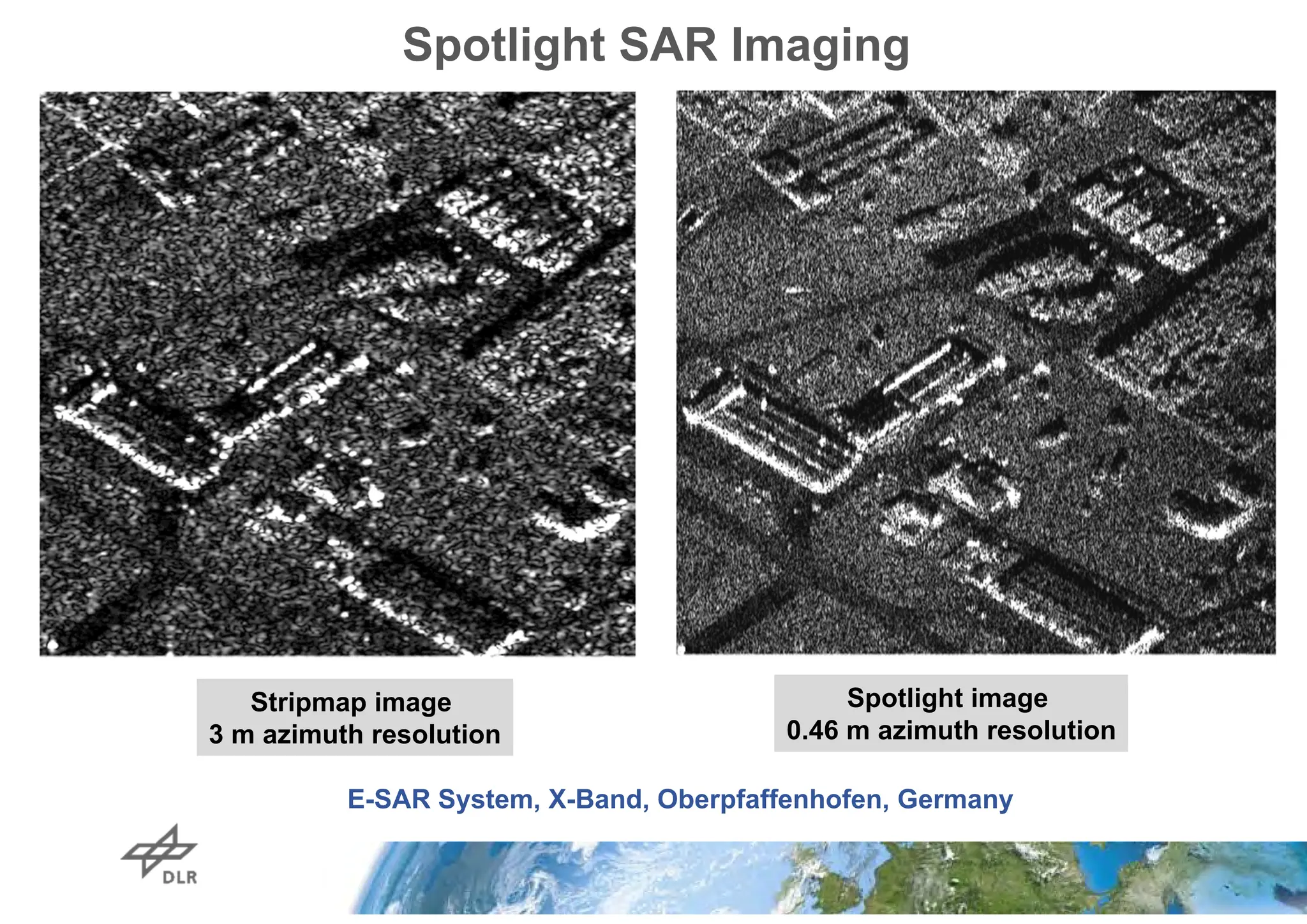
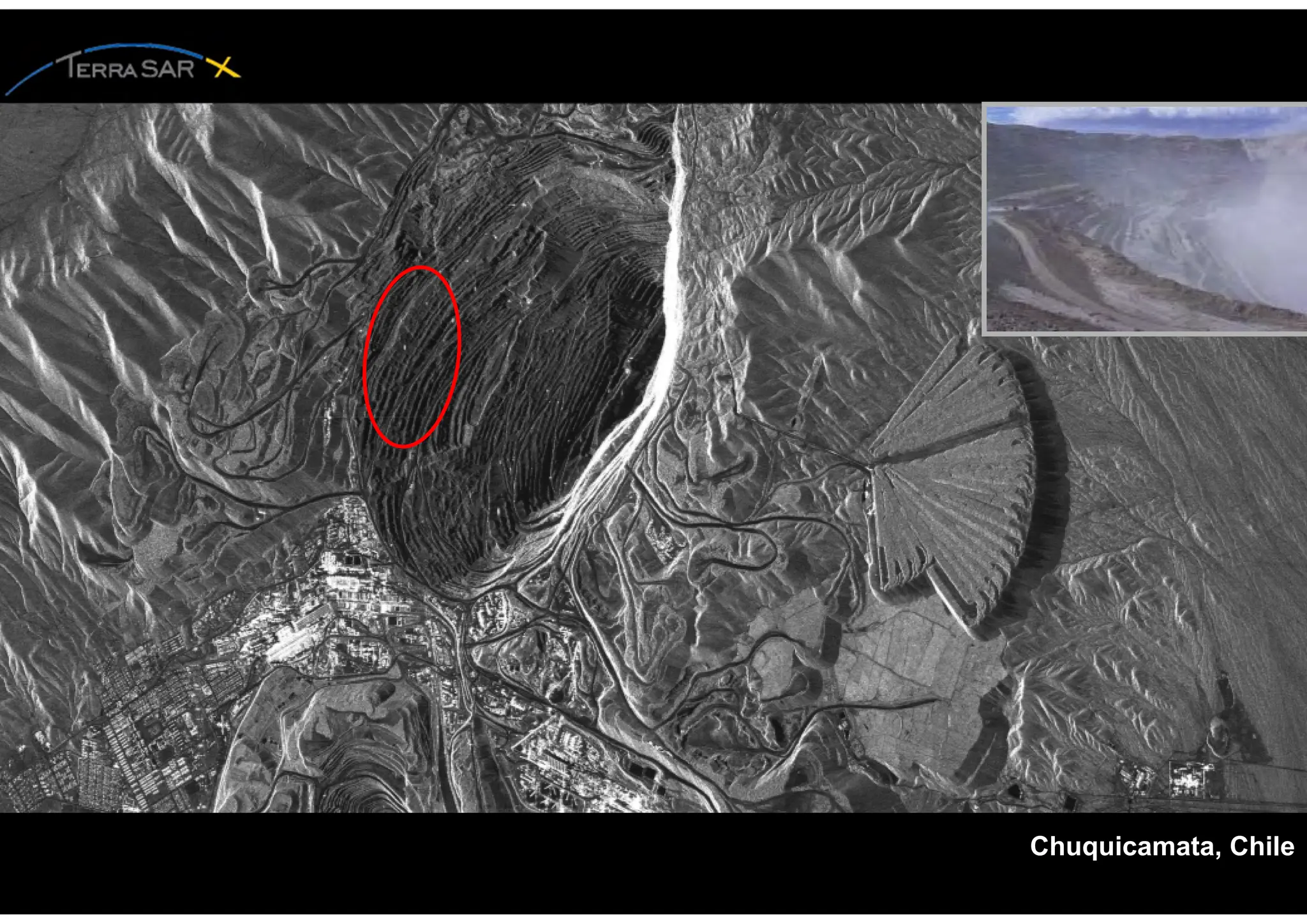
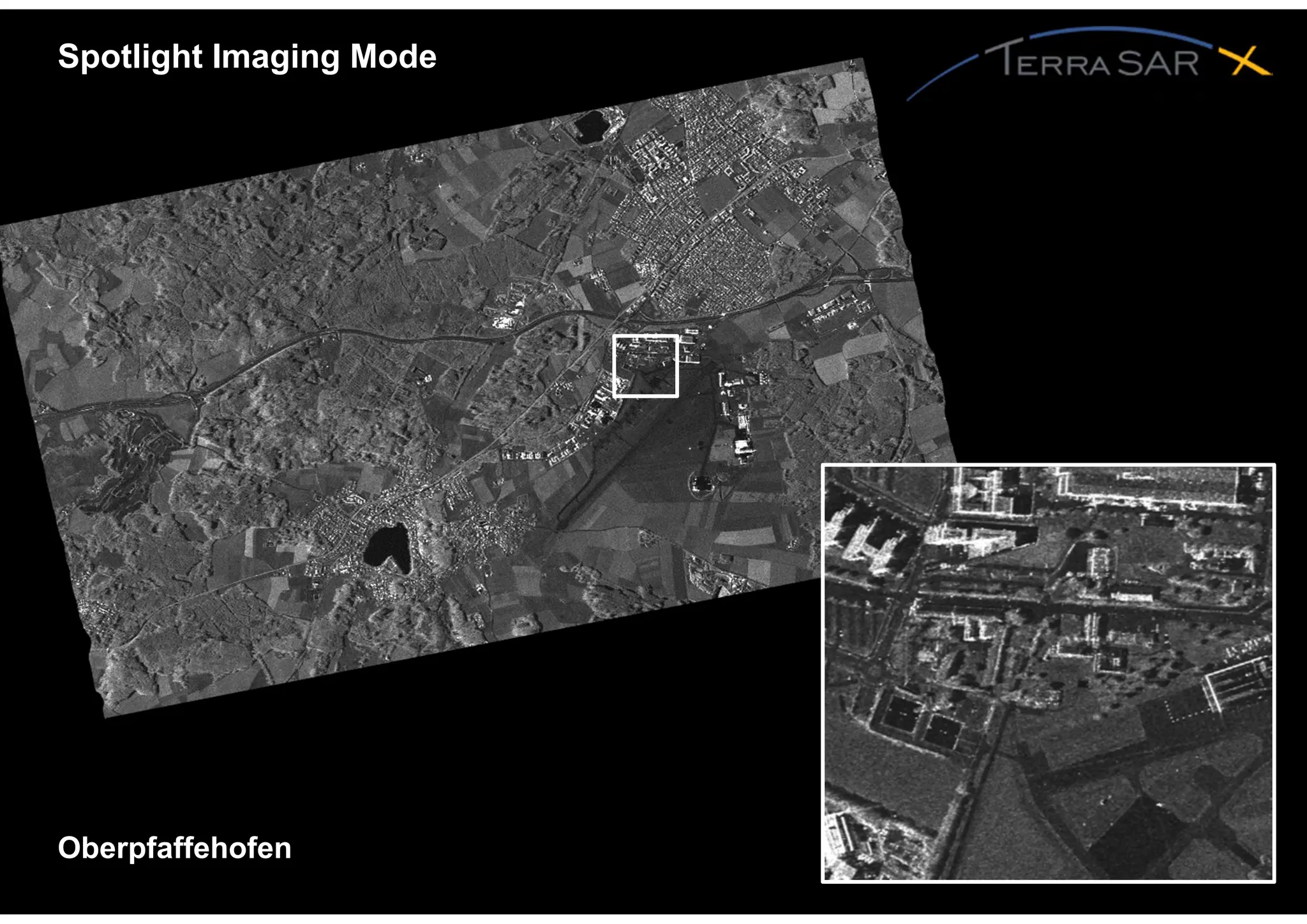
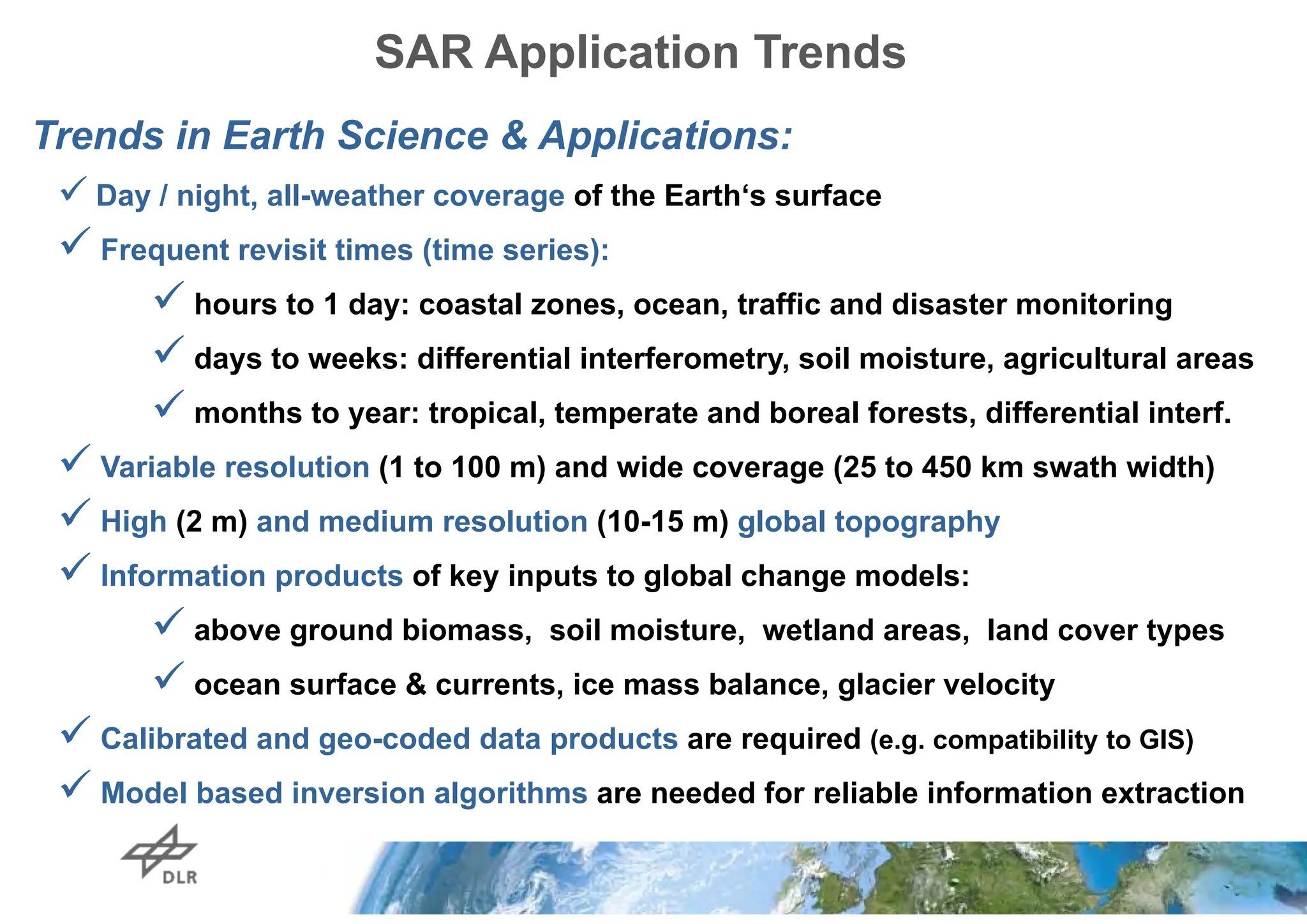
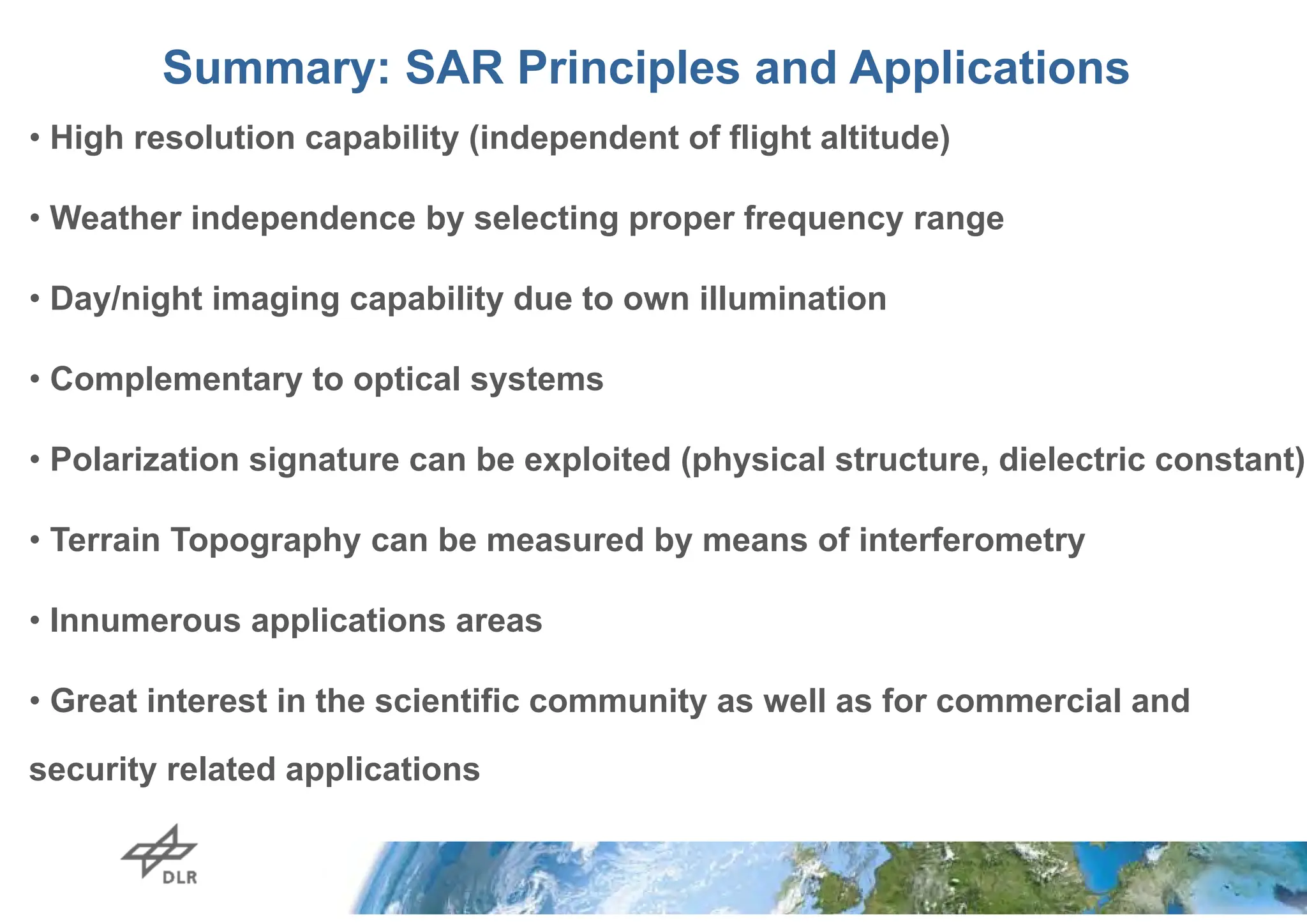
The document outlines the principles and applications of Synthetic Aperture Radar (SAR), detailing its image formation, processing techniques, and properties. It explains concepts like range and azimuth resolution, coherent measurement, and geometric distortions, as well as advanced SAR imaging modes such as ScanSAR and spotlight modes. Additionally, it discusses the implications of SAR technology for Earth science and various applications, emphasizing its high-resolution imaging capabilities regardless of weather conditions.