Download to read offline





![1 Product Information
- 4 -
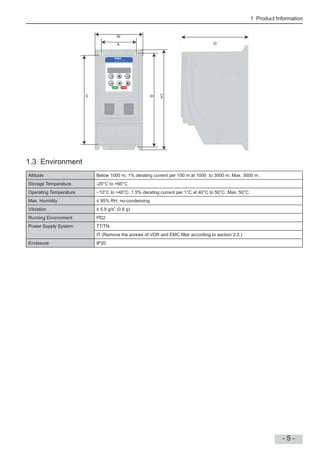
1.2 General Speci cations
Voltage class 200 to 240VAC
Model: C1-xB(1)
0.4 0.75 1.5 2.2
Dimension(2)
Height
Width
Depth
[H ]: 180 mm
[W]: 75 mm
[D]: 145 mm
Mounting Hole, [mm] 5.0
Drive Input Rated Input voltage 1 PH, 200 to 240 VAC , -15% to +10%
Rated input current, [A] 6.5 11.0 18.0 27.0
Rated input frequency 50/60 Hz, 5%
Power capacity, [kVA] 1.7 3.0 4.8 7.1
Drive Output Applicable motor [kW] 0.4 0.75 1.5 2.2
[HP] 0.5 1 2 3
Output current, [A] 2.6 4.6 8.0 11.0
Default carrier frequency, [kHz] 6 6 6 6
Overload capacity 150% for 60 Sec
Max. output voltage 3 PH, 0 to 240 VAC
Max. output frequency 50 to 500 Hz
Braking Resistor Recommended power, [W] 80 80 100 100
Recommended resistance, min. [ ] 200 150 100 70
Weight, [kg] 1.1
Note
(1): "B" denotes build-in brake function.
(2): The dimensions are shown as below:](https://image.slidesharecdn.com/resize-bientanfuji-dienhathe-190409051627/85/Resize-bientanfuji-dienhathe-com-5-320.jpg)
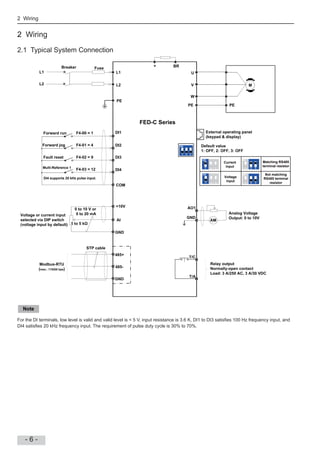
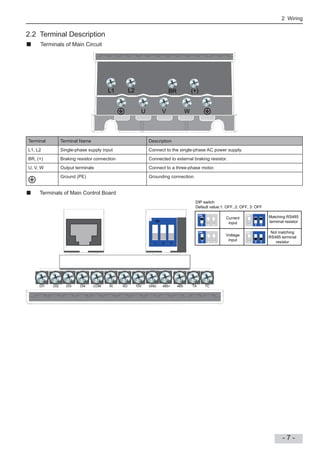

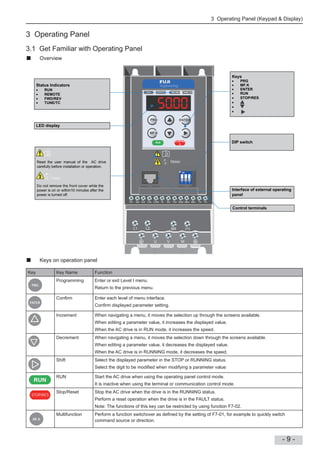


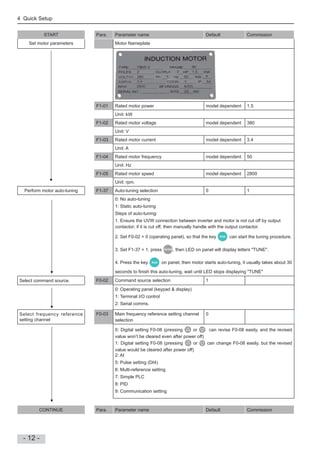








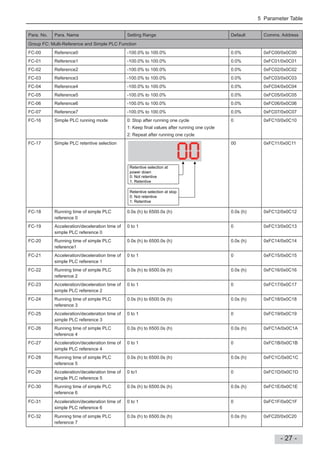
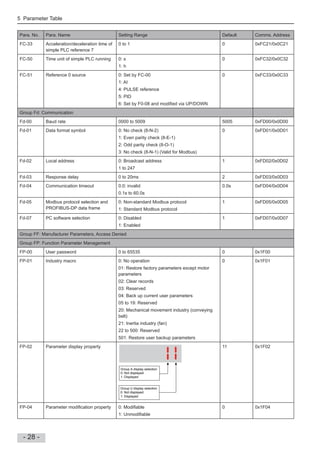
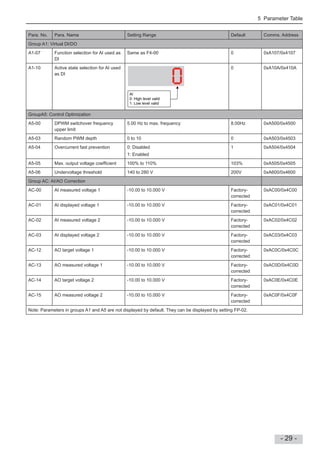
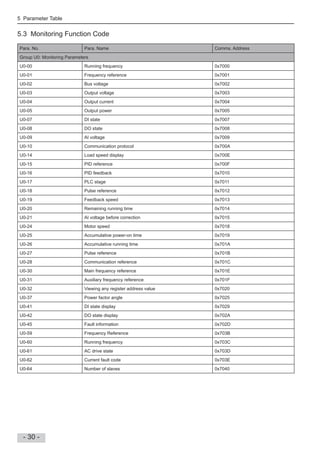






This document provides a quick start guide for the FED-C Series AC drive. It includes information on safety, wiring, the operating panel, quick setup, standard parameters, troubleshooting, and revision history. The guide contains basic instructions to get started with installation and configuration of the AC drive.