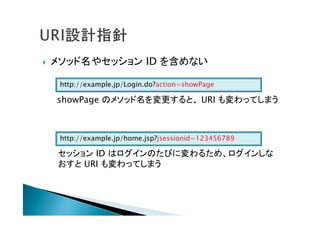
メソッド名やセッション IDを含めない
showPage のメソッド名を変更すると、 URI も変わってしまう
セッション ID はログインのたびに変わるため、ログインしな
おすと URI も変わってしまう
http://example.jp/Login.do?action=showPage
http://example.jp/home.jsp?jsessionid=123456789
URI 設計の重要性
RESTに基づいた URI 設計により、ユーザビリティは高まる
Web アプリ設計の技法として
ステートレスな設計は、煩雑なシステムになりにくい
Web サービスを作る際の設計指針として
他システムと簡単に連携でき、大規模なサービスの拡張にも役立つ
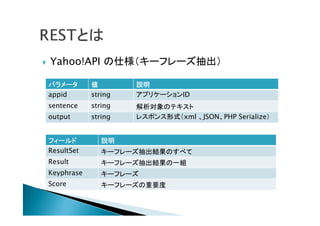
標準的な API の提供
RESTful API を公開することで、標準的なデータフォーマットを使
い、多様なアプリケーションを提供することができる
#25 URI を静的なものにする必要がある。
そうすれば、リソースが変更された場合、またはサービスの実装が変更された場合にも、リンクは同じまま。
こうすることでブックマークを付けられるようになる。
また URI にエンコードされたリソース同士の関係が、それらのリソースが保存されている場所でのリソースの表現方法に依存しないようにすることも重要。