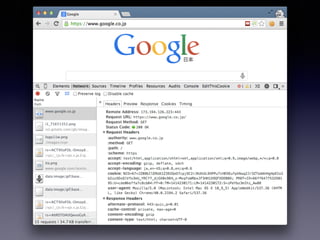
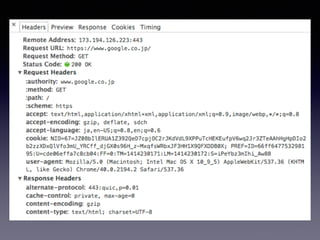
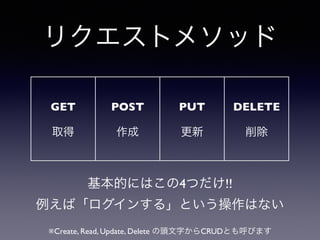
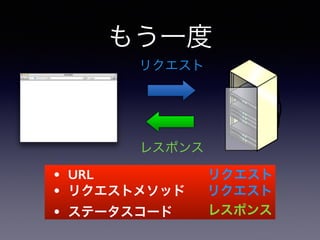
リクエストメソッド
GET
取得
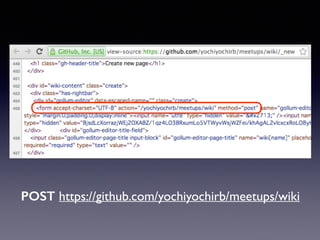
POST
作成
PUT
更新
DELETE
削除
基本的にはこの4つだけ!!
例えば「ログインする」という操作はない
※Create, Read, Update, Delete の頭文字からCRUDとも呼びます
26.
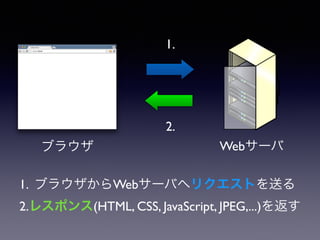
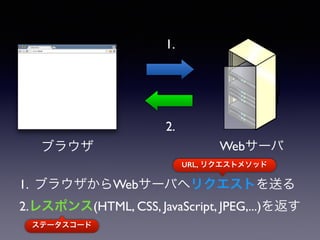
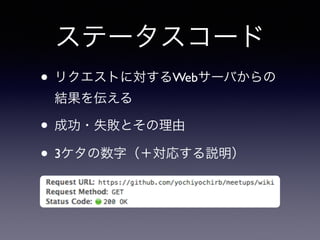
リクエスト
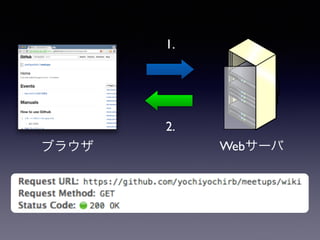
GET https://github.com/yochiyochirb/meetups/wiki
POST https://github.com/yochiyochirb/meetups/wiki
PUT https://github.com/yochiyochirb/meetups/wiki
DELETE https://github.com/yochiyochirb/meetups/wiki
メソッド
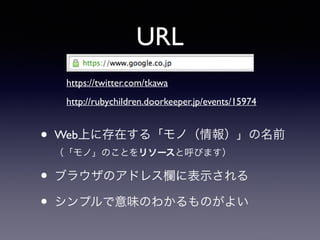
URL
「どうする」動詞「モノ」
名詞
GET POST PUTDELETE
/groups index create - -
/groups/1 show - update destroy
「ユーザーがグループに加入する」は?
47.
リクエストメソッドがあてはまらない
ときは、隠れたリソースがある
•「ユーザーがグループに加入する」
= 所属 membership の作成
GET POST PUT DELETE
/memberships index create - -
/memberships/1 show - update destroy














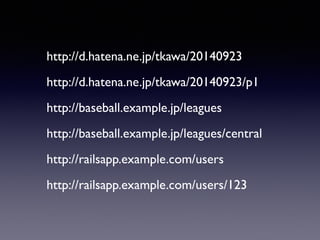
![http://d.hatena.ne.jp/tkawa/20140923
http://d.hatena.ne.jp/tkawa/20140923/p1
http://baseball.example.jp/leagues
http://baseball.example.jp/leagues/central
http://railsapp.example.com/users
http://railsapp.example.com/users/123
/[まとまり]/[名前,, 番号]](https://image.slidesharecdn.com/learningrestfromrailsstyle-141030225019-conversion-gate01/85/RESTful-Rails-REST-39-320.jpg)
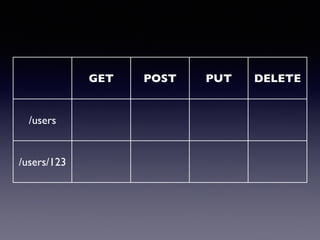

![GET POST PUT DELETE
/users index create - -
/users/123 show - update destroy
/[まとまり]/ 番号](https://image.slidesharecdn.com/learningrestfromrailsstyle-141030225019-conversion-gate01/85/RESTful-Rails-REST-44-320.jpg)


![まとめ
• “REST”の枠に入るのが
Webのパーツ
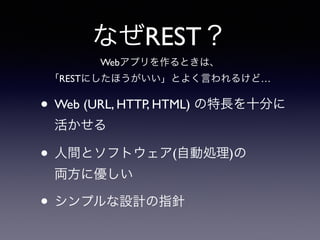
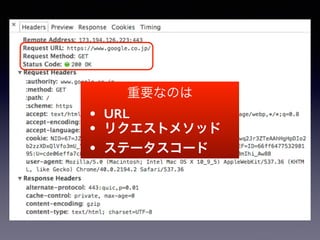
• Webで重要なのは
• URL
• リクエストメソッド
• ステータスコード
• 作るときはRailsスタイルに
従えば楽
http://rest-pattern.hatenablog.com/
http://d.hatena.ne.jp/tkawa/searchdiary?word=*[rest]](https://image.slidesharecdn.com/learningrestfromrailsstyle-141030225019-conversion-gate01/85/RESTful-Rails-REST-48-320.jpg)