Gartner
Magic
Quadrant
for
Cloud
Infrastructure
as
a
Service
(August
19,
2013)
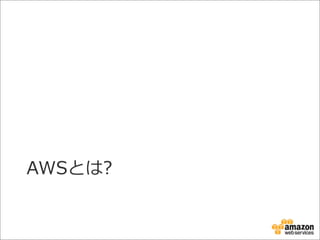
Gartner
“Magic
Quadrant
for
Cloud
Infrastructure
as
a
Service,”
Lydia
Leong,
Douglas
Toombs,
Bob
Gill,
Gregor
Petri,
Tiny
Haynes,
August
19,
2013.
This
Magic
Quadrant
graphic
was
published
by
Gartner,
Inc.
as
part
of
a
larger
research
note
and
should
be
evaluated
in
the
context
of
the
enPre
report..
The
Gartner
report
is
available
upon
request
from
Steven
Armstrong
(asteven@amazon.com).
Gartner
does
not
endorse
any
vendor,
product
or
service
depicted
in
its
research
publicaPons,
and
does
not
advise
technology
users
to
select
only
those
vendors
with
the
highest
raPngs.
Gartner
research
publicaPons
consist
of
the
opinions
of
Gartner's
research
organizaPon
and
should
not
be
construed
as
statements
of
fact.
Gartner
disclaims
all
warranPes,
expressed
or
implied,
with
respect
to
this
research,
including
any
warranPes
of
merchantability
or
fitness
for
a
parPcular
purpose.
7
8.
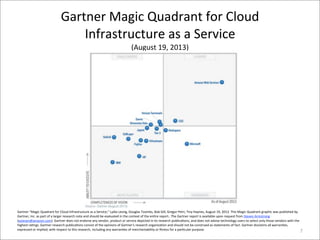
The
Forrester
Wave™:
Enterprise
Public
Cloud
Plaorms,
Q2
2013
Forrester
Wave™:
Enterprise
Public
Cloud
Plaorms
For
Coders,
Q2
‘13
Forrester
Wave™:
Enterprise
Public
Cloud
Plaorms
For
DevOps
Pros,
Q2
‘13
Forrester
Wave™:
Enterprise
Public
Cloud
Plaorms
For
AD&D
Leaders,
Q2
‘13
The
Forrester
Wave™
is
copyrighted
by
Forrester
Research,
Inc.
Forrester
and
Forrester
Wave™
are
trademarks
of
Forrester
Research,
Inc.
The
Forrester
Wave™
is
a
graphical
representaPon
of
Forrester's
call
on
a
market
and
is
plobed
using
a
detailed
spreadsheet
with
exposed
scores,
weighPngs,
and
comments.
Forrester
does
not
endorse
any
vendor,
product,
or
service
depicted
in
the
Forrester
Wave.
InformaPon
is
based
on
best
available
resources.
Opinions
reflect
judgment
at
the
Pme
and
are
subject
to
change.
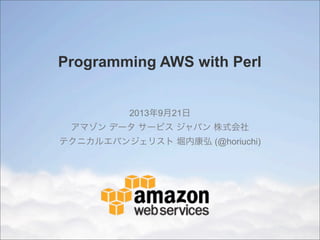


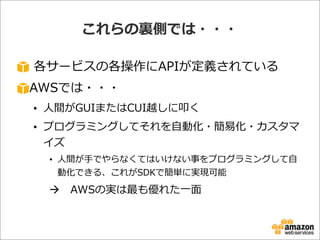


![初期設定
環境変数かコンフィグファイルで設定
$ cat ~∼/.aws/config
[default]
aws_̲access_̲key_̲id = AKIXXXXYYYYYZZZZ
aws_̲secret_̲access_̲key = AWSAWSAWSZZZZZZ
region = ap-‐‑‒northeast-‐‑‒1](https://image.slidesharecdn.com/20130921yapcasia2013-130920220207-phpapp02/85/Programming-AWS-with-Perl-at-YAPC-Asia-2013-24-320.jpg)
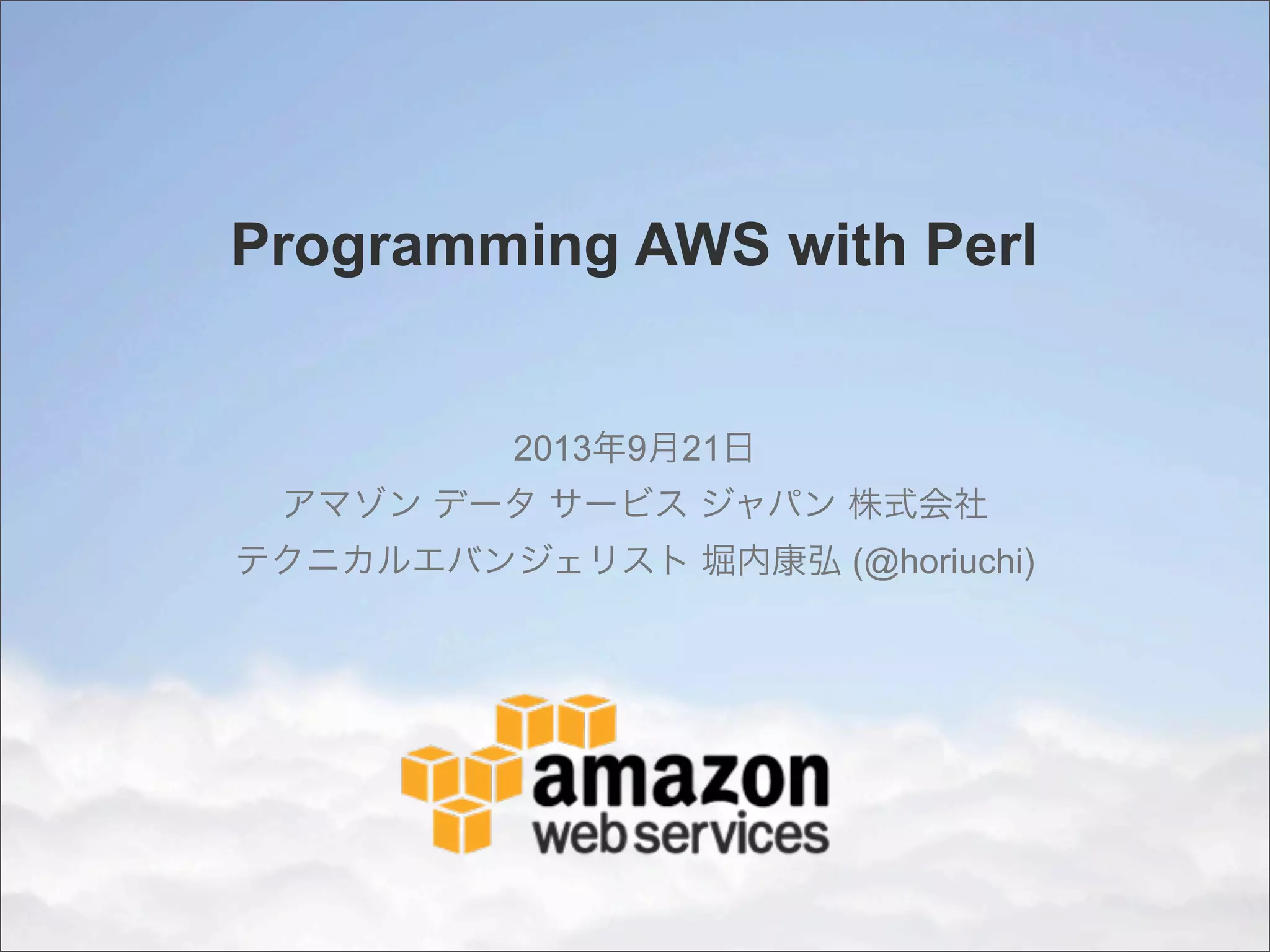
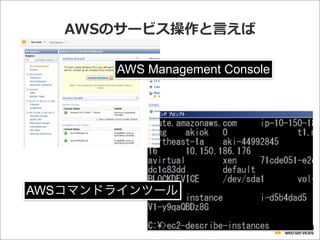
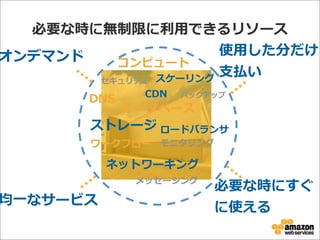
![使い⽅方
aws [サービス名] アクション オプション
# EC2インスタンス⼀一覧を取得
$ aws ec2 describe-‐‑‒instances
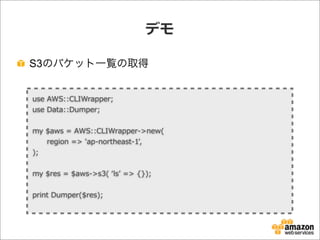
# S3のバケット⼀一覧を取得
$ aws s3 ls
# S3とローカルのディレクトリをsync
$ aws s3 sync . s3://bucketname/dir](https://image.slidesharecdn.com/20130921yapcasia2013-130920220207-phpapp02/85/Programming-AWS-with-Perl-at-YAPC-Asia-2013-26-320.jpg)
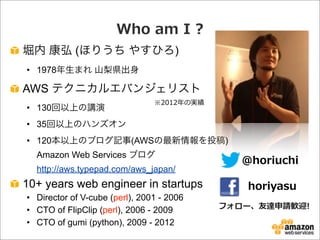
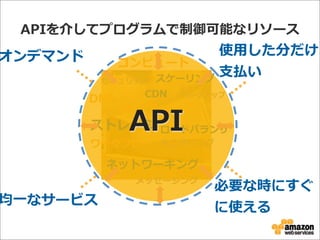
![AWS::CLIWrapper
@hirose31 さん作のAWS CLIのラッパーモジュール
こんな感じで違和感なく使える。
use AWS::CLIWrapper;
my $aws = AWS::CLIWrapper-‐‑‒>new(
region => 'ap-‐‑‒northeast-‐‑‒1',
);
my $res = $aws-‐‑‒>ec2(
ʻ‘describe-‐‑‒instancesʼ’, {
ʻ‘instance_̲idsʼ’ => [ʻ‘ʼ’i-‐‑‒xxxxxx, ʼ’i-‐‑‒yyyyyyyʼ’],
}
);](https://image.slidesharecdn.com/20130921yapcasia2013-130920220207-phpapp02/85/Programming-AWS-with-Perl-at-YAPC-Asia-2013-31-320.jpg)































![[AWSマイスターシリーズ] AWS SDK for PHP / Ruby / boto(Python) / JavaScript in Node.js](https://cdn.slidesharecdn.com/ss_thumbnails/20131218aws-meister-regenerate-awssdkforruby-php-python-node-public20131218-131218175831-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)















![[AWSマイスターシリーズ] AWS CLI / AWS Tools for Windows PowerShell](https://cdn.slidesharecdn.com/ss_thumbnails/20140115aws-meister-regenerate-awsclipowershell-140130055421-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)






















