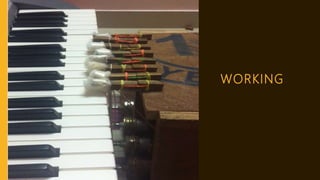
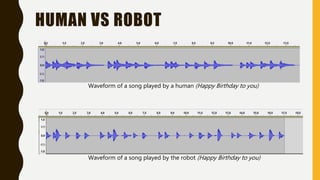
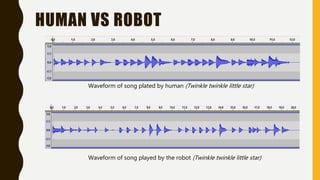
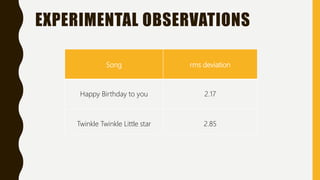
The document describes a robot that is designed to play the piano. It has 8 wooden fingers attached to motors that can press down on piano keys. An Arduino microcontroller is used as the "brain" to command the motor driver and control the motors to press the keys in sequences programmed into the code. Graphs show the waveforms of songs like "Happy Birthday" played by both a human and the robot piano player, demonstrating its ability to replicate piano music. Experimental results found small rms deviations between the human and robot performances.





































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)












