KTH Transport Labs
Implementation center
• Network organization
• Facilities for continuity
• Innovation & Exposure arena
• Industry collaboration ”channel”
KTH Transport Labs
All implementation
activities
in one building
2. SML– Aktuella
forskningområden
•Platooning-koordinering av autonoma
fordon på väg
•Ruttoptimering med hänsyn till annan
trafik (för bränsleekonomi och restid)
•Trafikstyrning för bränsleeffektiva
godstransporter (ITS-lösningar, tex
GLOSA, Green Light Optimized Speed
Advisory)
Kontaktperson: Jonas Mårtensson, KTH
12.
Utbildningsbaserade projekt
”EcoCar”,energi effektivitet
• 50+ Master studenter/år
• 2012 Bränslecell: 1200km/eqL
• 2013 Batterdriven: 2500 km/eqL
KTHs student-team i ”CoAct”
– SCOOP (KTH+SCANIA)
• 10+ Master studenter/år
• 2012 Scania dragbil deltog GCDC
• Nationell demo utanför Nyköping
13.
Några andra projekt
1.Urbana Elektriska Lättviktsfordon
(100km/h, 100km, 100 tkr) 2. Konceptfordon Lastbil/Buss
5. LCA-analys Fordonsdesign
“Sustainable SMITE”
3. Transport-ICT applikationer
14.
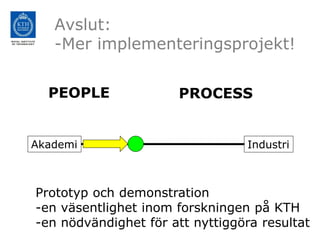
Avslut:
-Mer implementeringsprojekt!
PEOPLE PROCESS
Akademi Industri
Prototyp och demonstration
-en väsentlighet inom forskningen på KTH
-en nödvändighet för att nyttiggöra resultat
15.
Välkommen att besökaoss
och delta i projekt !
KTH Transport Labs
-en del av Transport Plattformen på KTH
Kontakt: Peter Georen, peterg@kth.se, 08-7907892