Downloaded 12 times

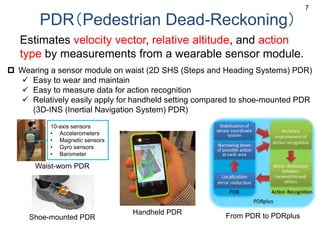
![AR by PDR + Image registration
(1999-2003)
Panorama-based Annotation:
IWAR1999, ISWC2001,
ISMAR2003
G
Environmental map
A
B C D
E
A
B
C
F
Input frames
Position at which
a panorama is taken
Position
Direction
235 [deg]
5 [deg]
From the user’s
camera
Located Orientated
9](https://image.slidesharecdn.com/kuratapdr-20160923-160924091104/85/PDR-for-lab-forming-field-and-its-benchmarking-9-320.jpg)






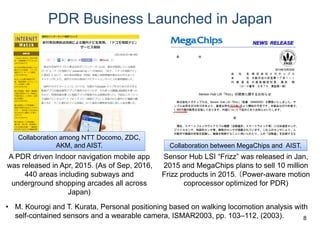
![UbiComp/ISWC 2015 PDR Challenge Corpus
• Is now open to the public. (http://hub.hasc.jp/)
21
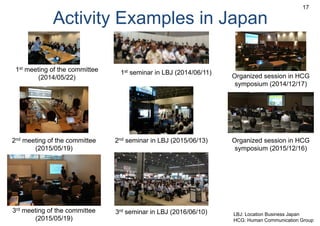
Routes 5
Devices 7
Subjects 93
# of pedestrian sensing data 241
# of pedestrian sensing data with
calibration data
230
# of pedestrian sensing data with
LIDAR data
10
Avg. of walking time [sec] 101
Avg. of moving distance [m] 115
Avg. of angular change [°] 606
K. Kaji, M. Abe, W. Wang, K. Hiroi, and N. Kawaguchi, UbiComp/ISWC 2015 PDR challenge
corpus, HASCA2016 (UbiComp2016 Proceedings: Adjunct), pp.696-704
Statistics of the corpus
Detailed route statistics of pedestrian
sensing data with calibration data](https://image.slidesharecdn.com/kuratapdr-20160923-160924091104/85/PDR-for-lab-forming-field-and-its-benchmarking-21-320.jpg)
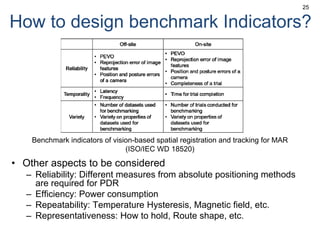




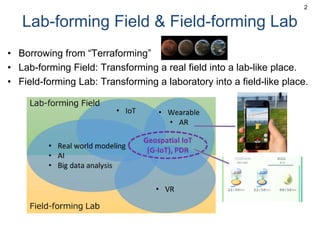
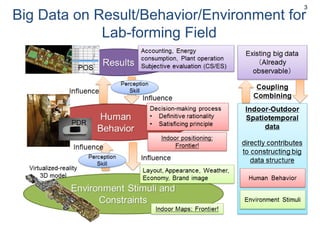
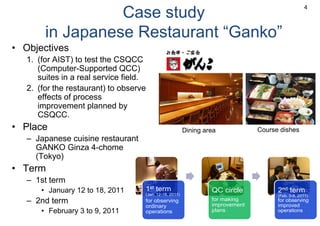
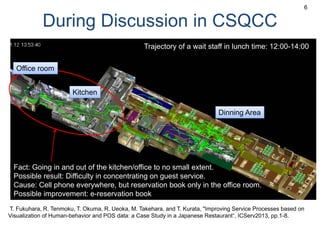
The document discusses the concepts of lab-forming fields and field-forming labs, focusing on transforming real environments for research purposes. It includes a case study at the Ganko restaurant in Tokyo that utilized computer-supported quality control suites to improve service processes through data visualization. Furthermore, it highlights advancements in pedestrian dead reckoning (PDR) technology, its applications in navigation, and the establishment of a standardization committee to benchmark PDR performance metrics.








![[Skolkovo Robotics V] Robotics in Korea](https://cdn.slidesharecdn.com/ss_thumbnails/roboticsinkorea-170422182747-thumbnail.jpg?width=640&height=640&fit=bounds)





![[Skolkovo Robotics V] Overview of the Modern Robotics Market](https://cdn.slidesharecdn.com/ss_thumbnails/1-170422175713-thumbnail.jpg?width=640&height=640&fit=bounds)