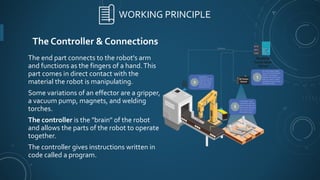
The document provides an overview of part-picking robots, detailing their components, such as actuators, sensors, and controllers. It discusses the working principles of robotic arms and sensors, emphasizing their roles in manipulating parts and avoiding collisions. Additionally, the text highlights the advantages and disadvantages of using such robots, predicting an increase in their use as AI technology evolves.