Scott L. Delp*,Frank C. Anderson, Allison S. Arnold, Peter Loan, Ayman Habib, Chand T. John,
Eran Guendelman, and Darryl G. Thelen,“OpenSim: Open-Source Software to Create and Analyze Dynamic
Simulations of Movement”, IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 54, NO.11, NOV. 2007
<論文>
Thelen, D.G. and Anderson, F.C., "Using computed muscle control to generate forward dynamic simulations of
human walking from experimental data, J. Biomech., 2006, 39(6):1107-1115
<User‘s guide>
https://simtk-confluence.stanford.edu:8443/display/OpenSim/User%27s+Guide
参考文献 はじめに
7
8.
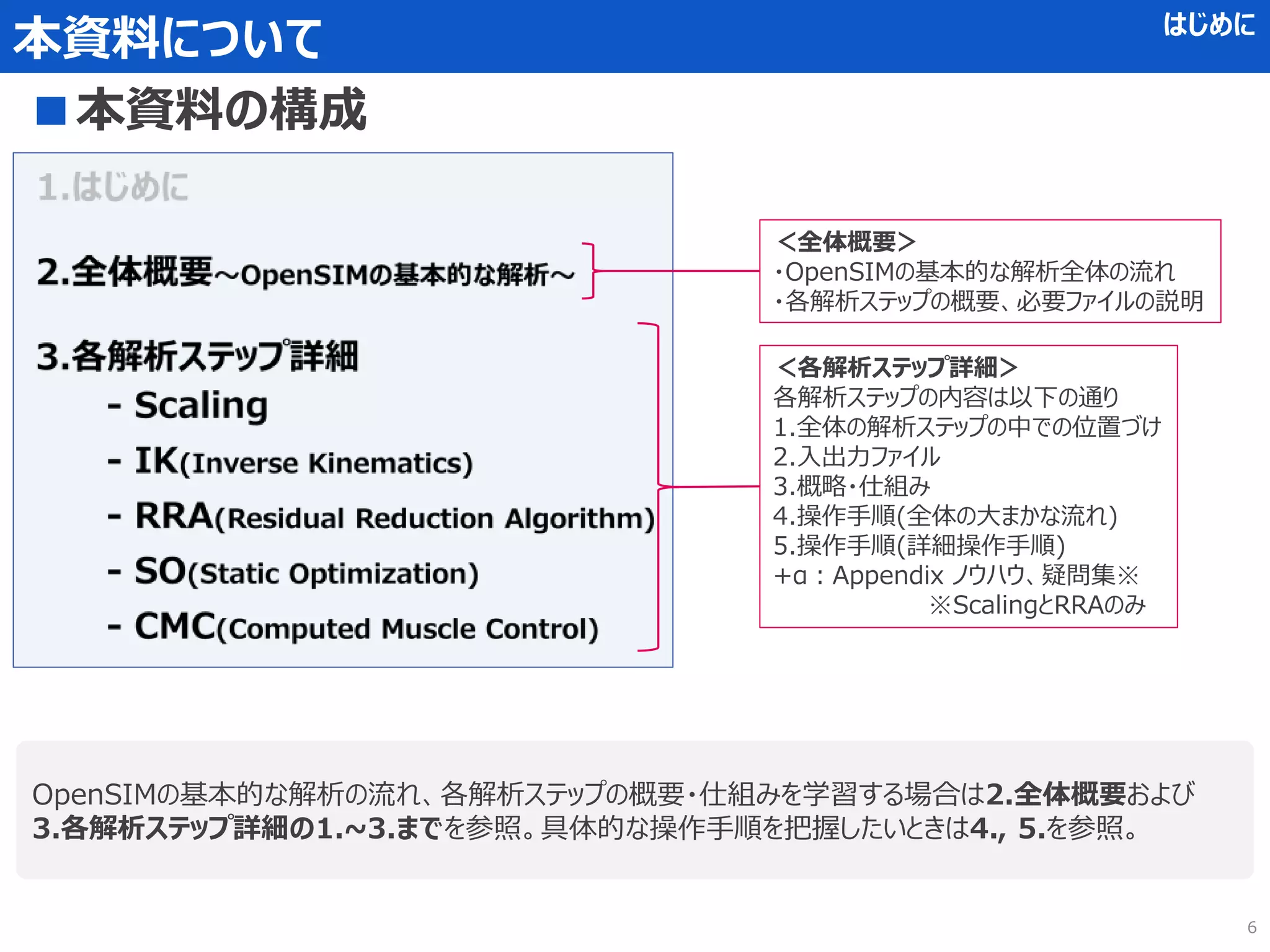
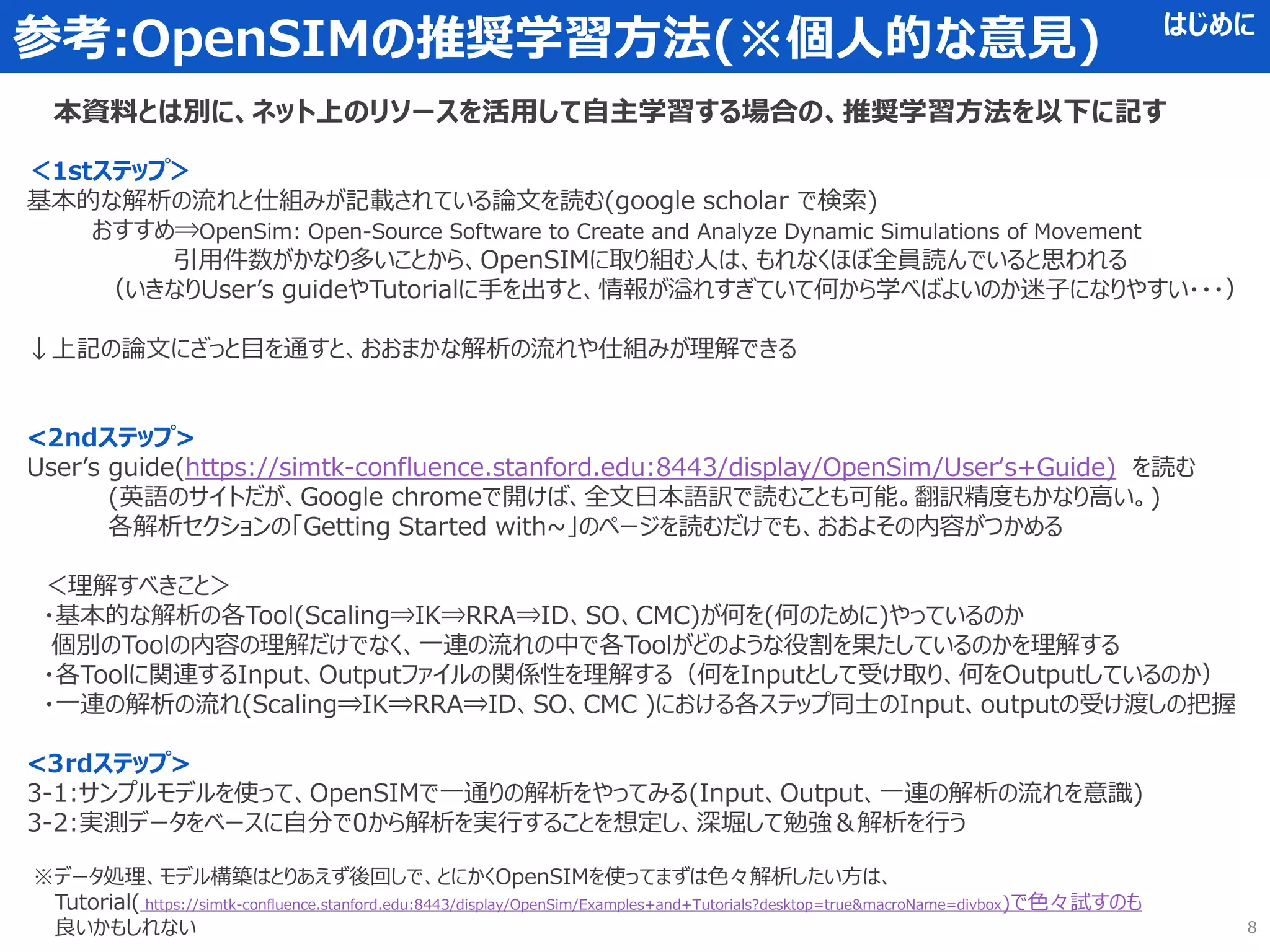
参考:OpenSIMの推奨学習方法(※個人的な意見) はじめに
<1stステップ>
基本的な解析の流れと仕組みが記載されている論文を読む(google scholarで検索)
おすすめ⇒OpenSim: Open-Source Software to Create and Analyze Dynamic Simulations of Movement
引用件数がかなり多いことから、OpenSIMに取り組む人は、もれなくほぼ全員読んでいると思われる
(いきなりUser’s guideやTutorialに手を出すと、情報が溢れすぎていて何から学べばよいのか迷子になりやすい・・・)
↓上記の論文にざっと目を通すと、おおまかな解析の流れや仕組みが理解できる
<2ndステップ>
User’s guide(https://simtk-confluence.stanford.edu:8443/display/OpenSim/User‘s+Guide) を読む
(英語のサイトだが、Google chromeで開けば、全文日本語訳で読むことも可能。翻訳精度もかなり高い。)
各解析セクションの「Getting Started with~」のページを読むだけでも、おおよその内容がつかめる
<理解すべきこと>
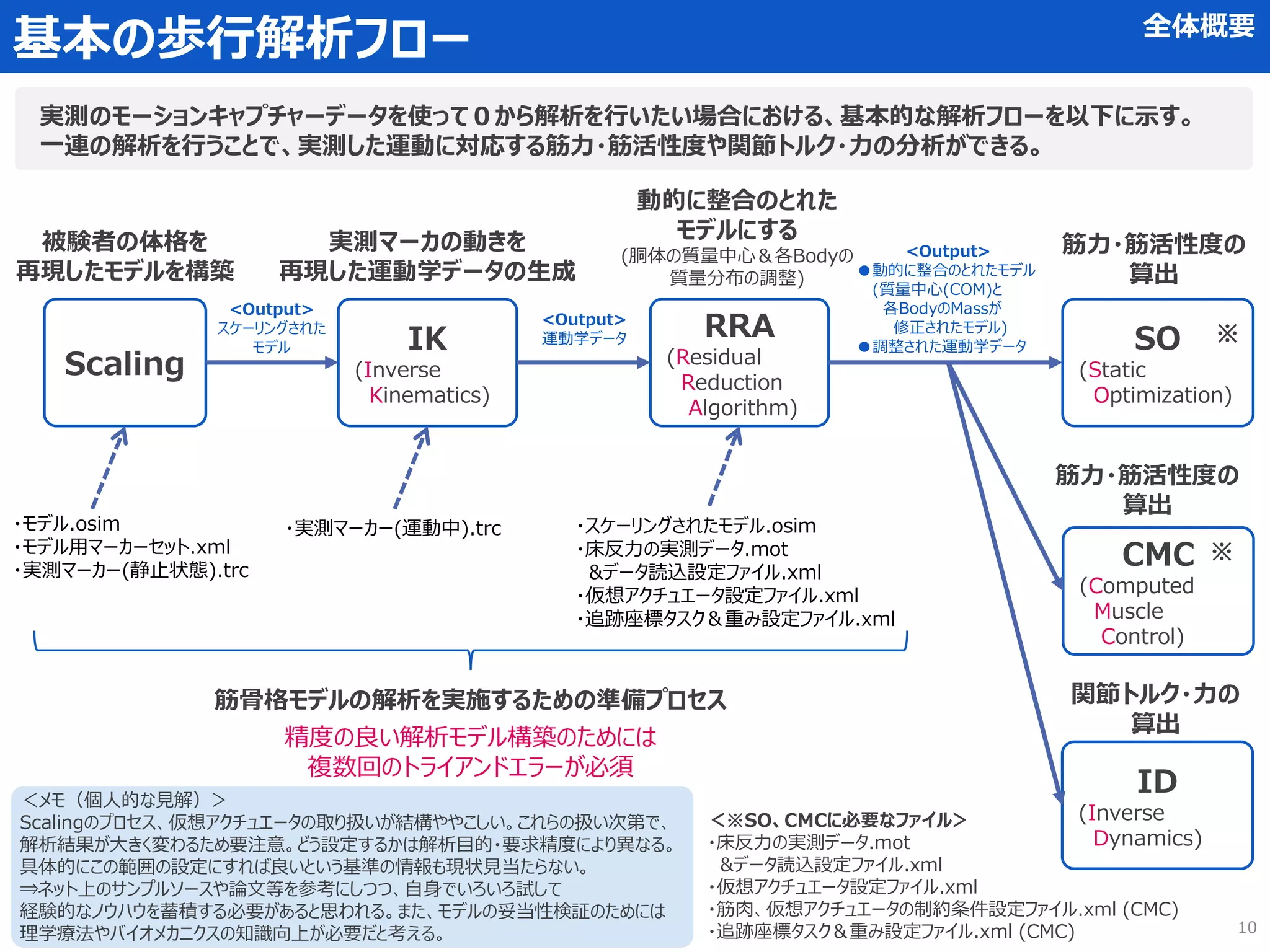
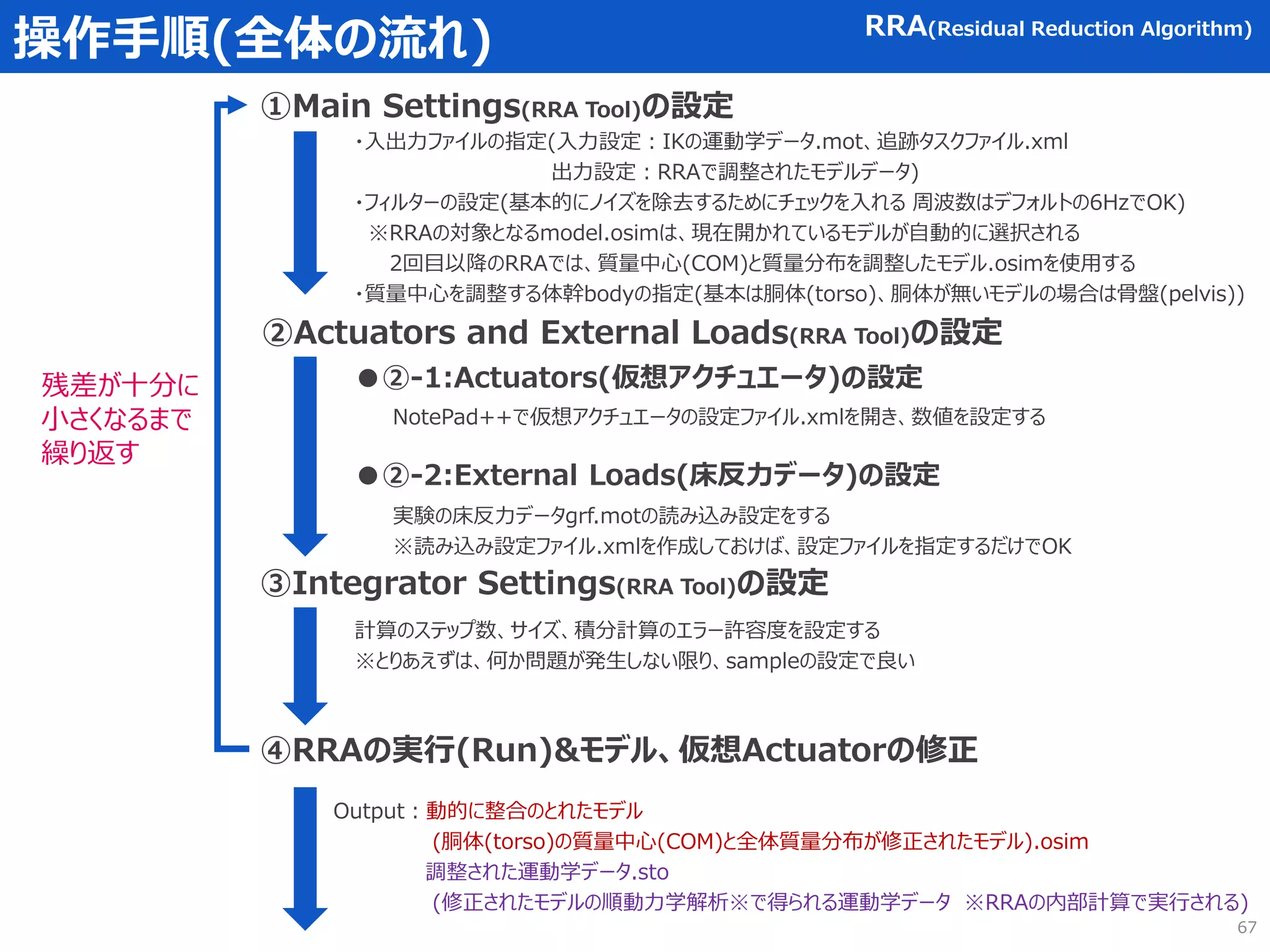
・基本的な解析の各Tool(Scaling⇒IK⇒RRA⇒ID、SO、CMC)が何を(何のために)やっているのか
個別のToolの内容の理解だけでなく、一連の流れの中で各Toolがどのような役割を果たしているのかを理解する
・各Toolに関連するInput、Outputファイルの関係性を理解する(何をInputとして受け取り、何をOutputしているのか)
・一連の解析の流れ(Scaling⇒IK⇒RRA⇒ID、SO、CMC )における各ステップ同士のInput、outputの受け渡しの把握
<3rdステップ>
3-1:サンプルモデルを使って、OpenSIMで一通りの解析をやってみる(Input、Output、一連の解析の流れを意識)
3-2:実測データをベースに自分で0から解析を実行することを想定し、深堀して勉強&解析を行う
本資料とは別に、ネット上のリソースを活用して自主学習する場合の、推奨学習方法を以下に記す
※データ処理、モデル構築はとりあえず後回しで、とにかくOpenSIMを使ってまずは色々解析したい方は、
Tutorial( https://simtk-confluence.stanford.edu:8443/display/OpenSim/Examples+and+Tutorials?desktop=true¯oName=divbox)で色々試すのも
良いかもしれない 8
RRA疑問集
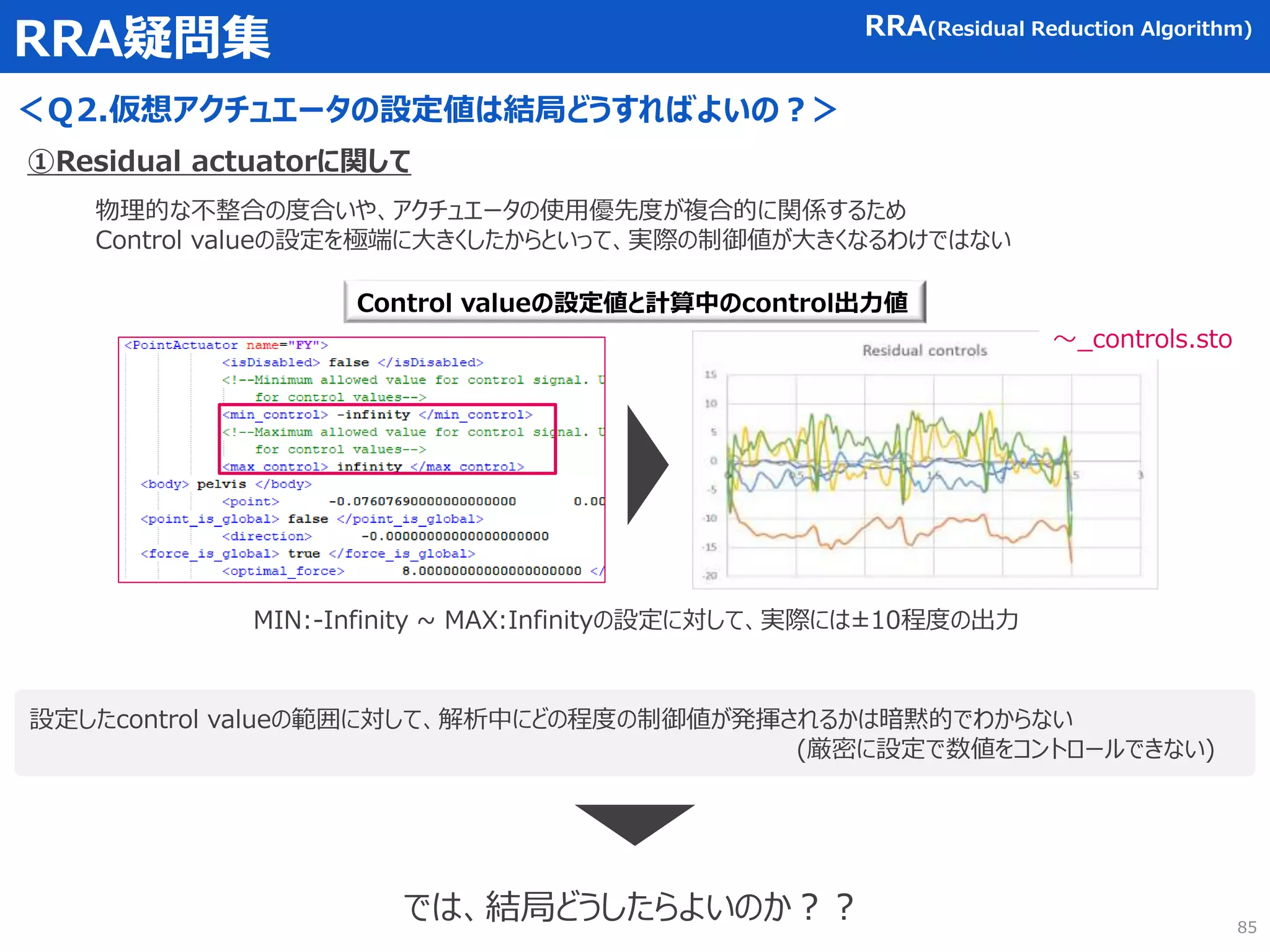
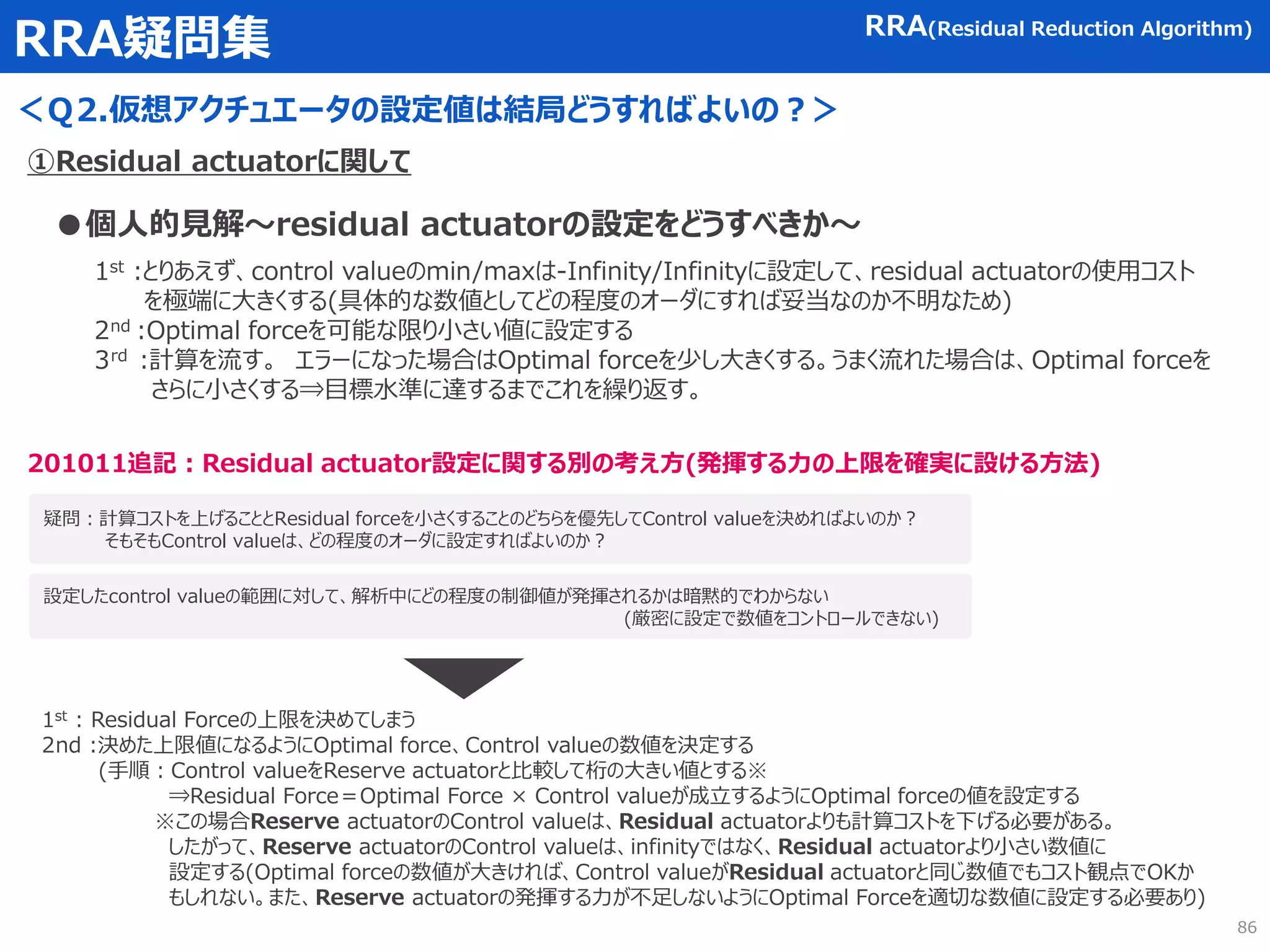
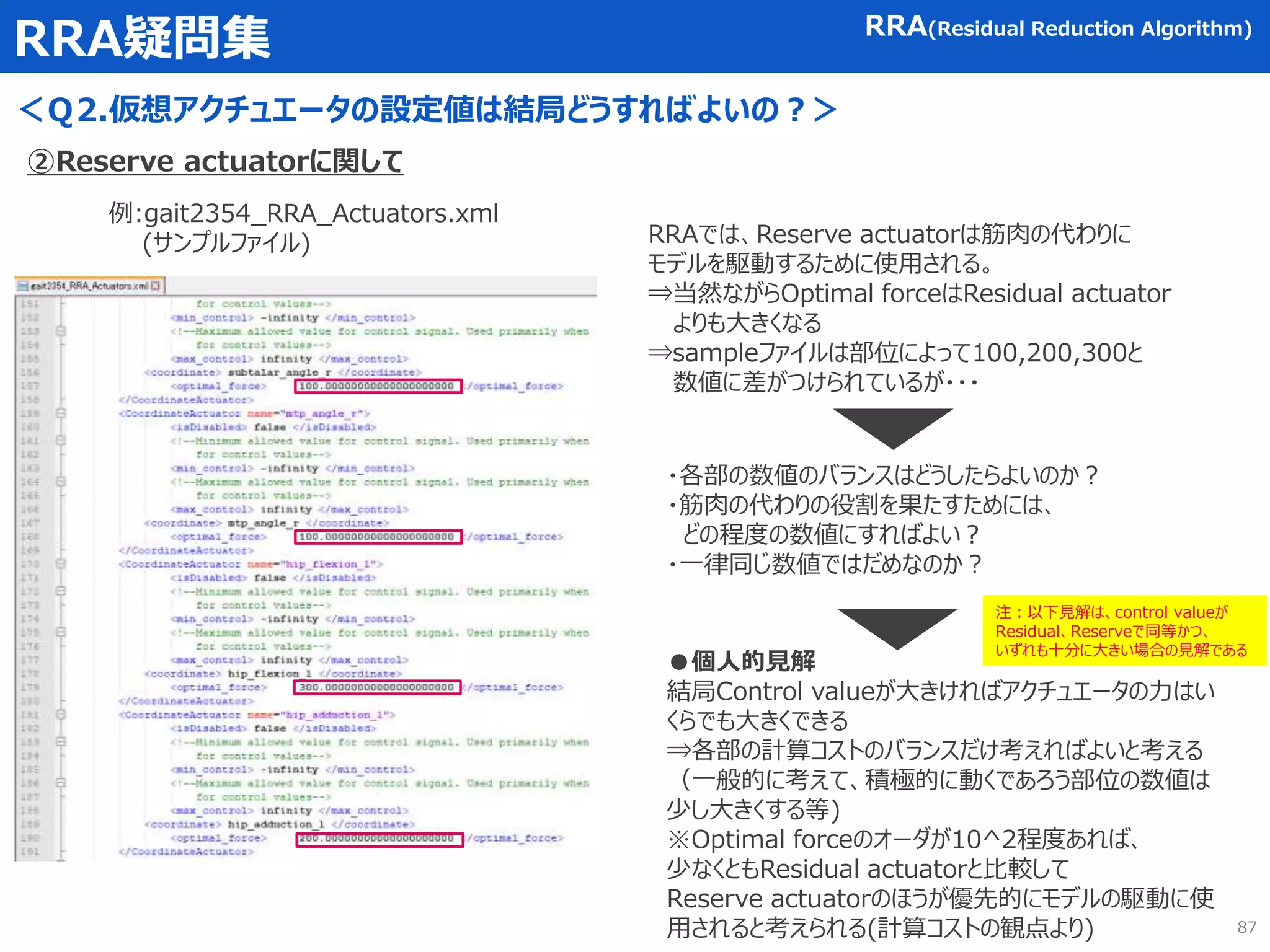
<Q2.仮想アクチュエータの設定値は結局どうすればよいの?>
疑問:計算コストを上げることとResidual forceを小さくすることのどちらを優先してControl valueを決めればよいのか?
そもそもControlvalueは、どの程度のオーダに設定すればよいのか?
RRA(Residual Reduction Algorithm)
①Residual actuatorに関して
計算コストを上げるためには
Control valueを大きくする必要がある
Residual forceを小さくするためには
Control valueを小さくする必要がある
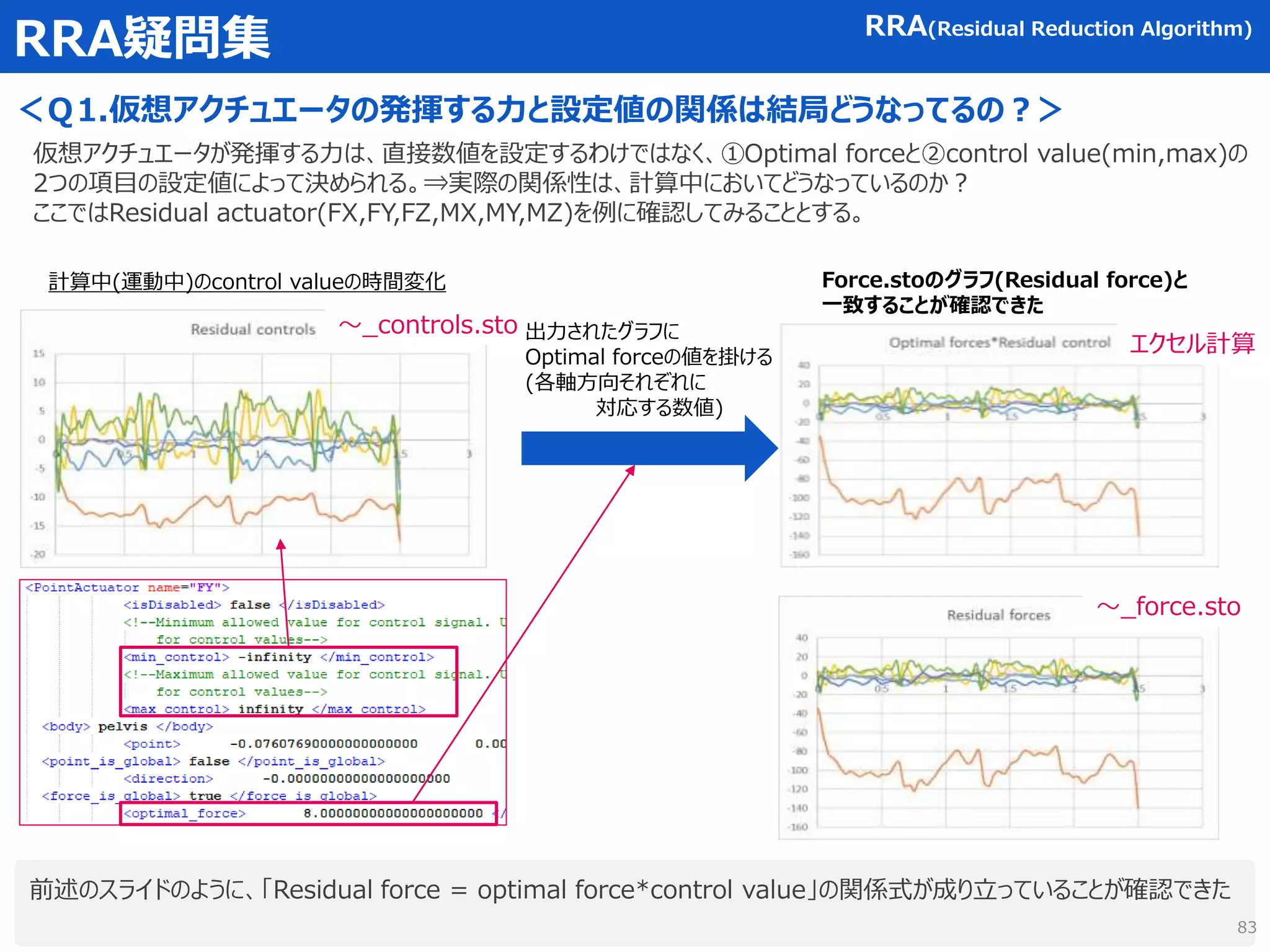
= Optimal force × control value
Residual force
●RRAの最適化計算では「計算コスト」が最も小さくなるようにモデルの各部の力が計算される
(要するに、最小の労力でモデルを駆動できるように各部の力が最適化される)
⇒したがって、計算コストの小さいアクチュエータから優先的にモデルの駆動に使用される
●Residual forceは、力学的不整合の辻褄を合わせるための、実際には存在しない力である。
⇒Residual forceの数値を最小化しつつ、最適化計算での使用優先度が低くなる(コストが高くなる)ように、値を設定する必要がある。
Optimal force:値が小さいほど計算コスト 大
Control value : 値が大きいほど計算コスト 大
しかしながら・・・ <Control valueの矛盾が生じる>
例:[Optimal force 小] × [Control value 大]
⇒筋肉量の少ない人が、筋肉を最大限活性化させて物を持ち上げているイメージ⇒コスト大
[Optimal force 大] × [Control value 小]
⇒筋肉量の多い人が、少ない筋活性度で軽々と物を持ち上げているイメージ⇒コスト小
以下に示すように、Control value はResidual forceと計算コストに対して、正反対の影響を及ぼしてしまう
84

![各解析ステップ概要
<Scaling>
<IK(Inverse Kinematics)>
目的:
概要・仕組み:
必要ファイル:
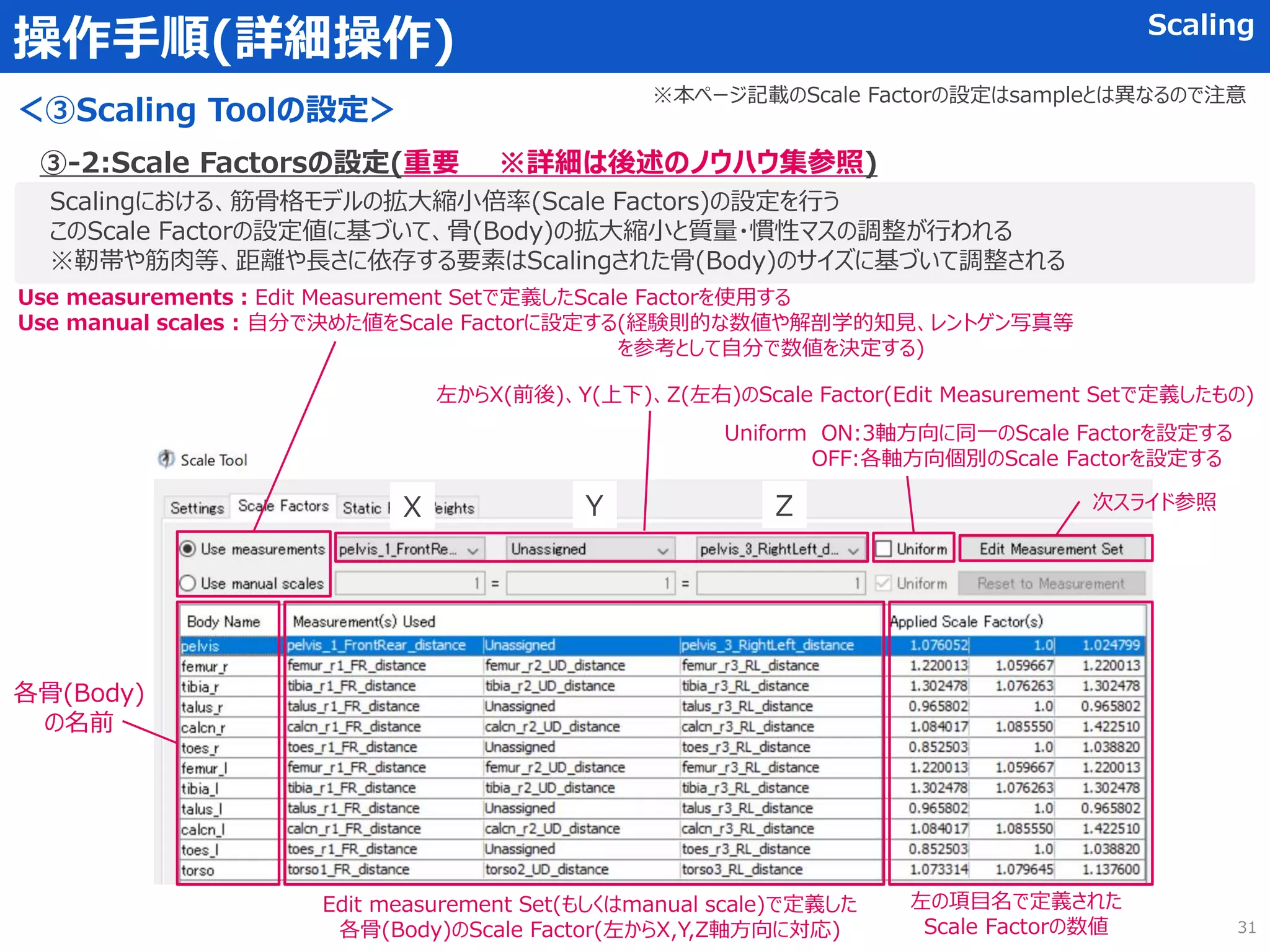
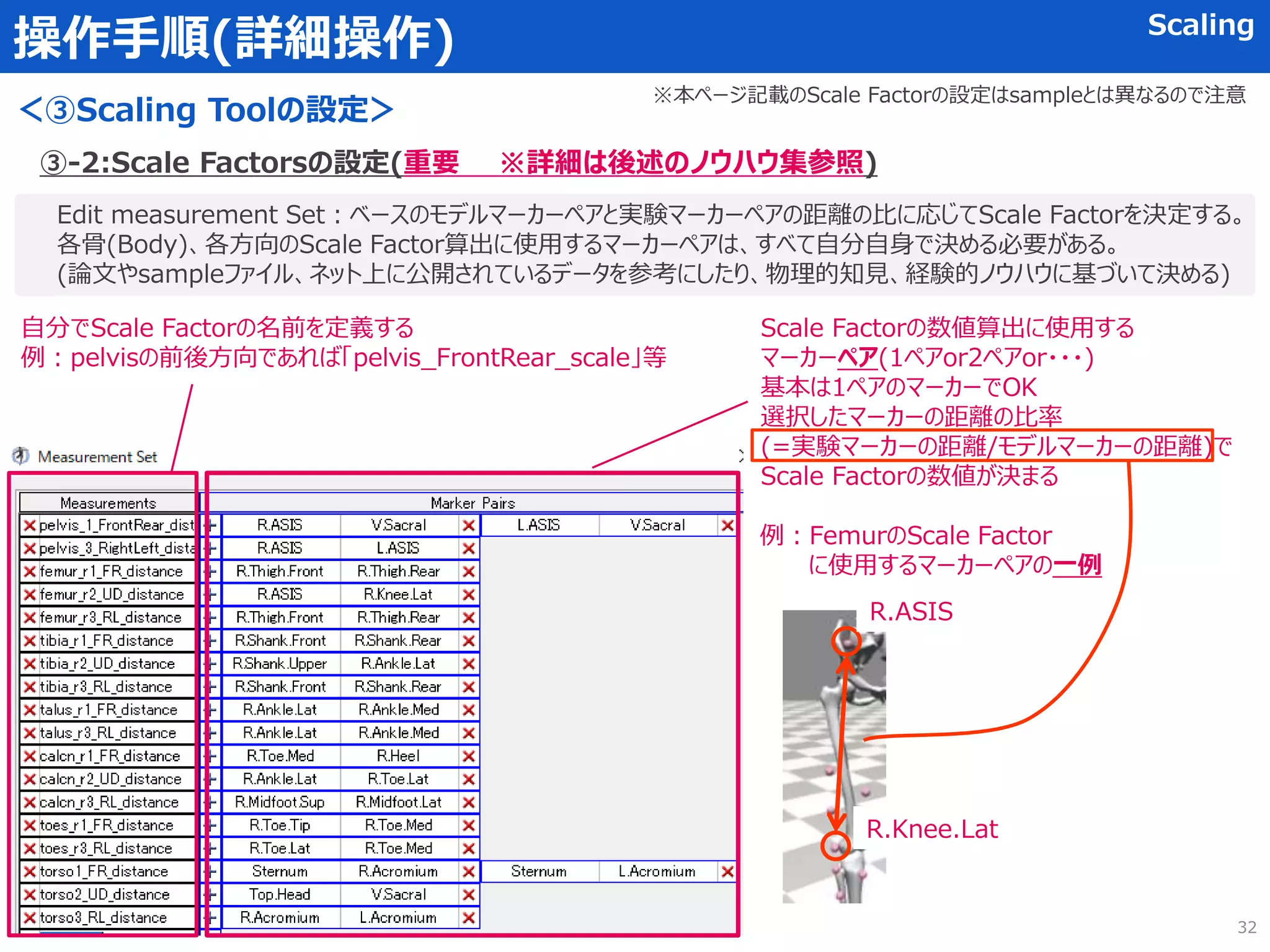
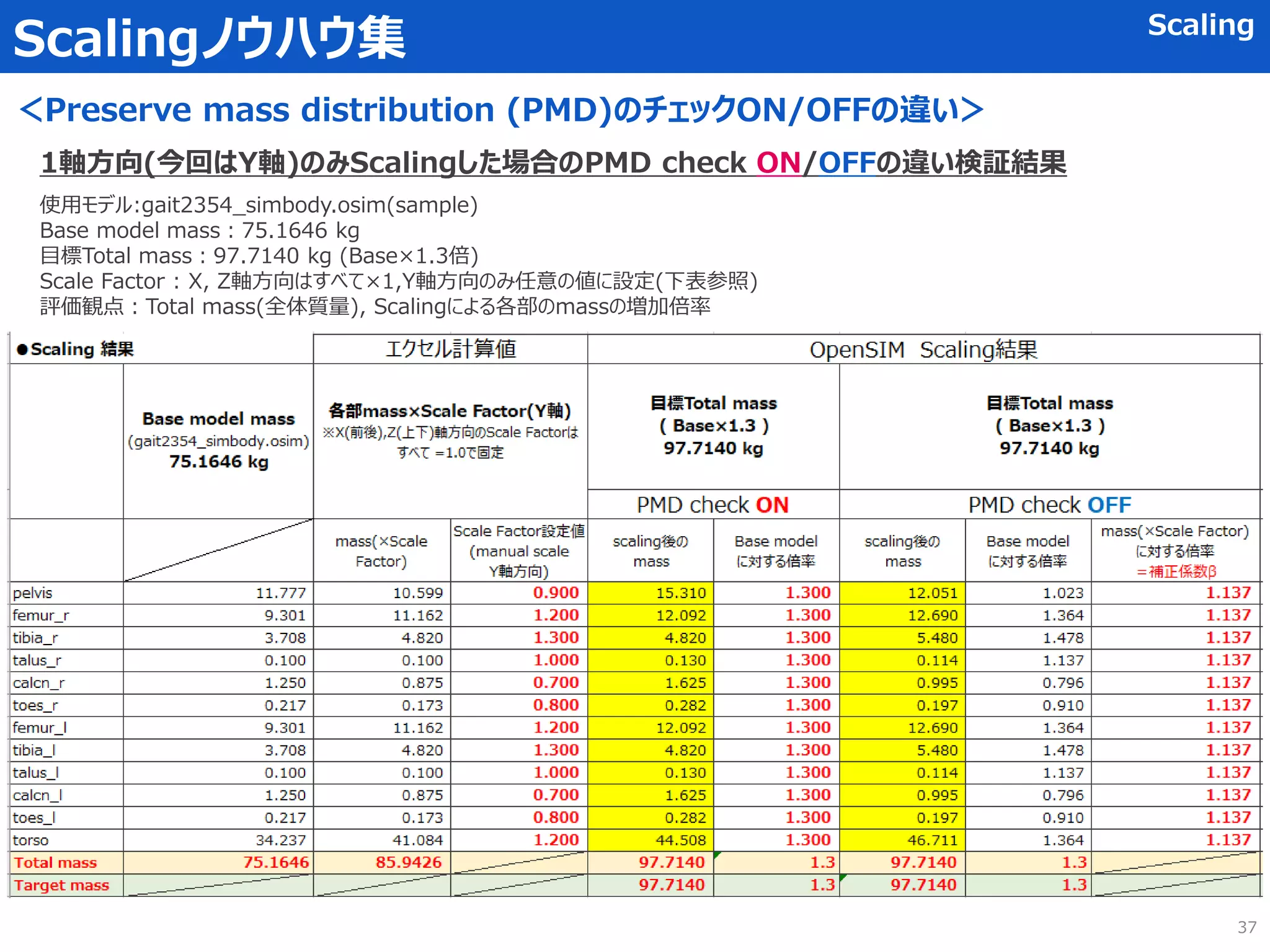
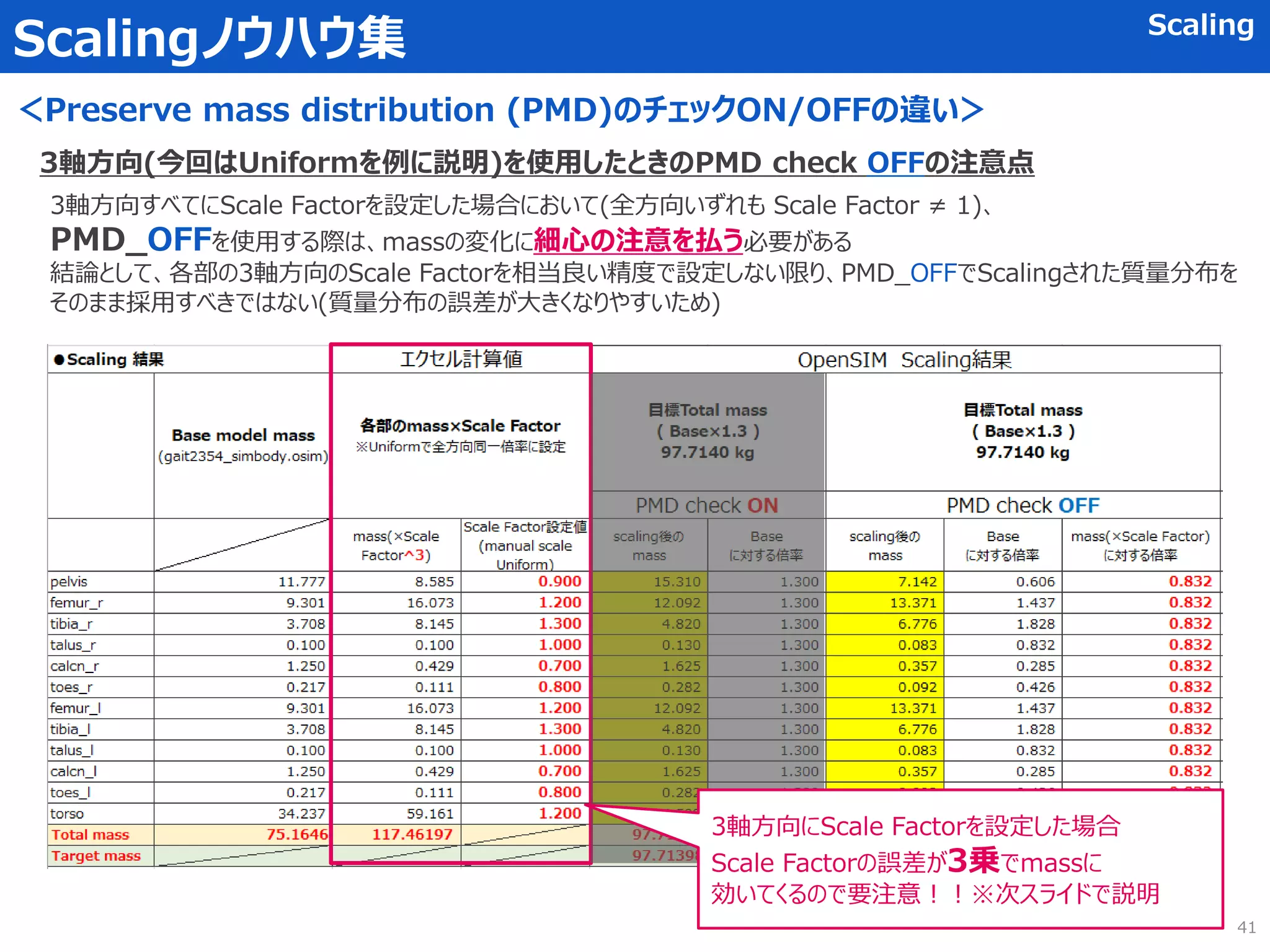
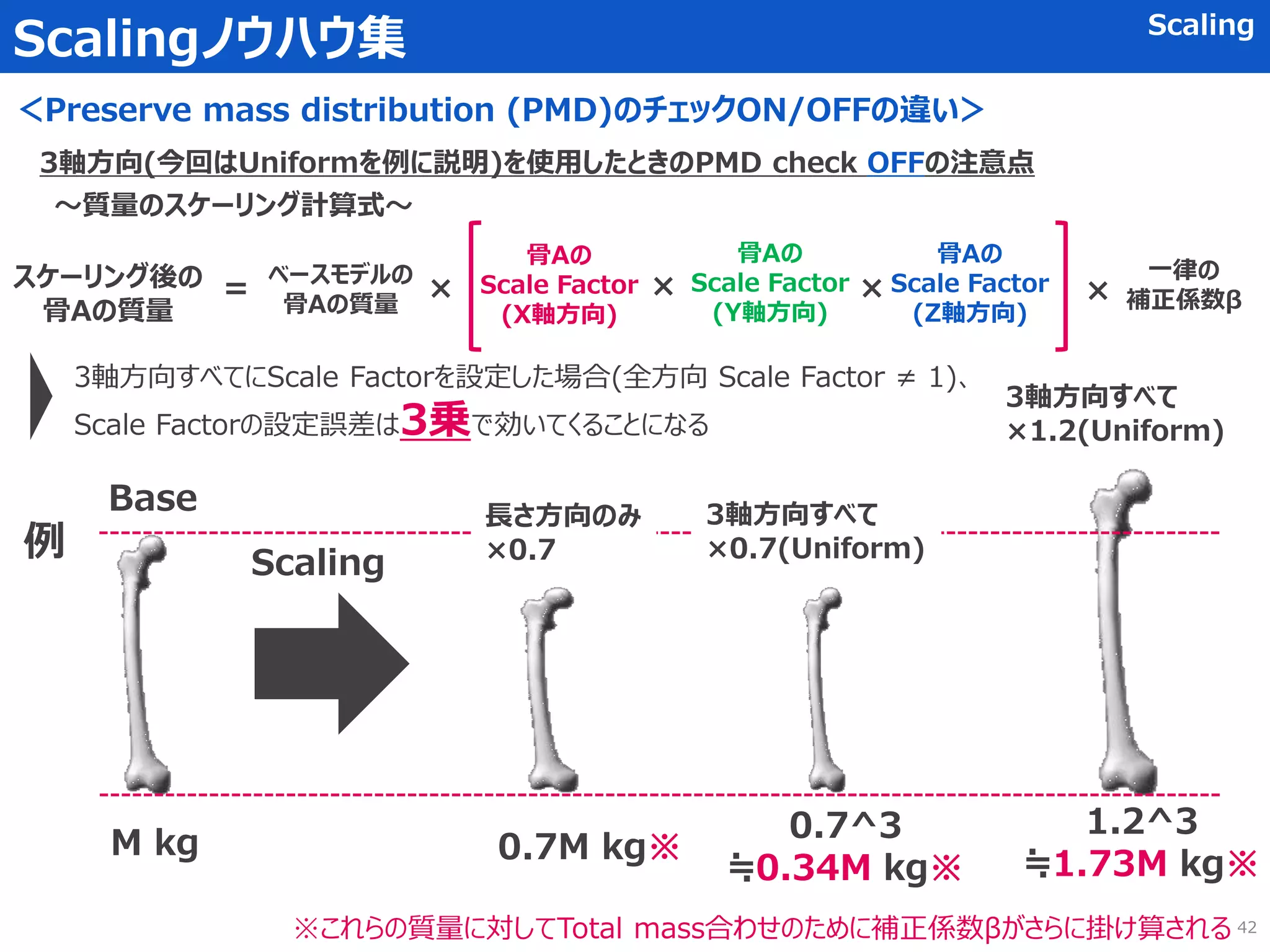
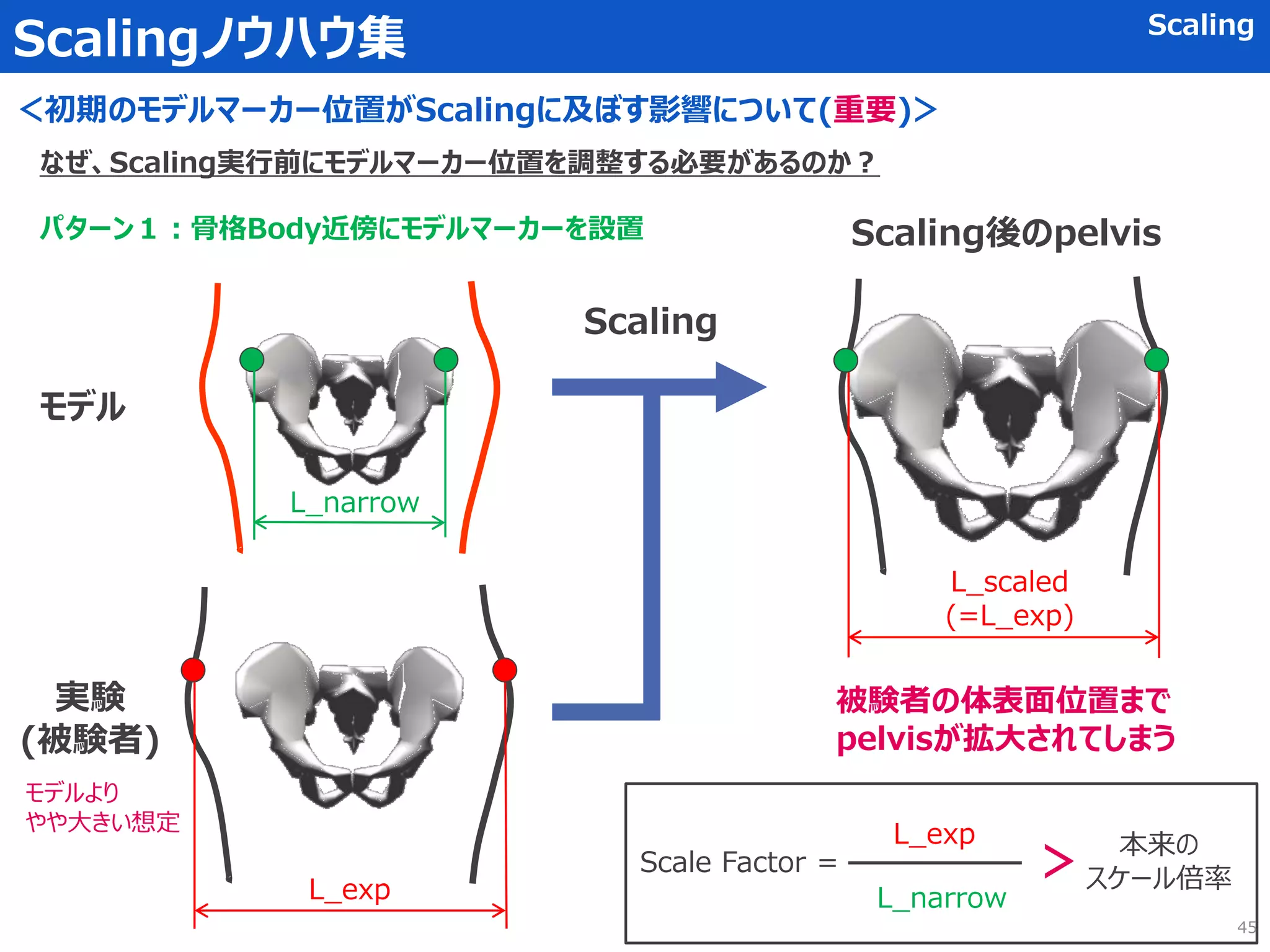
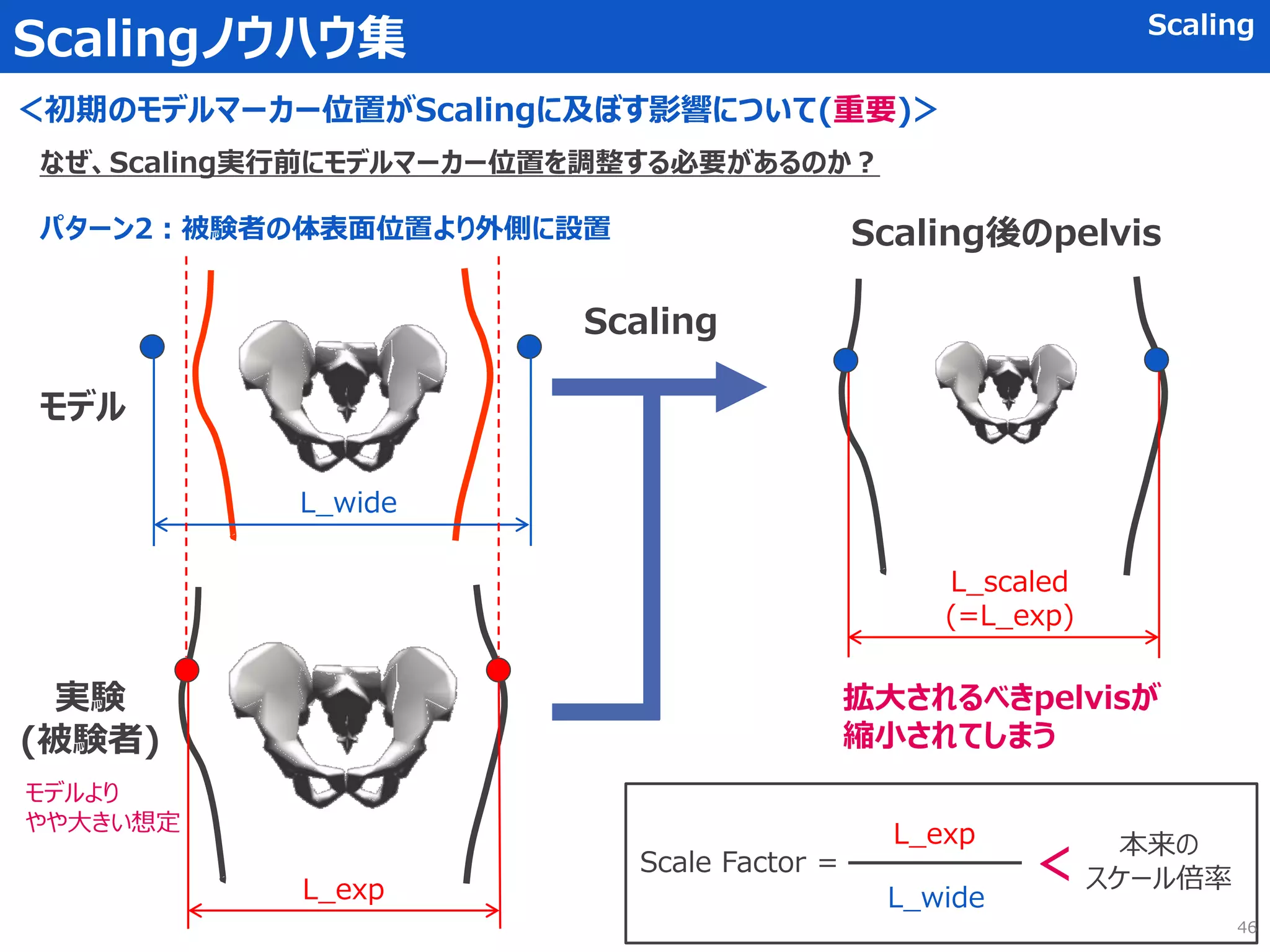
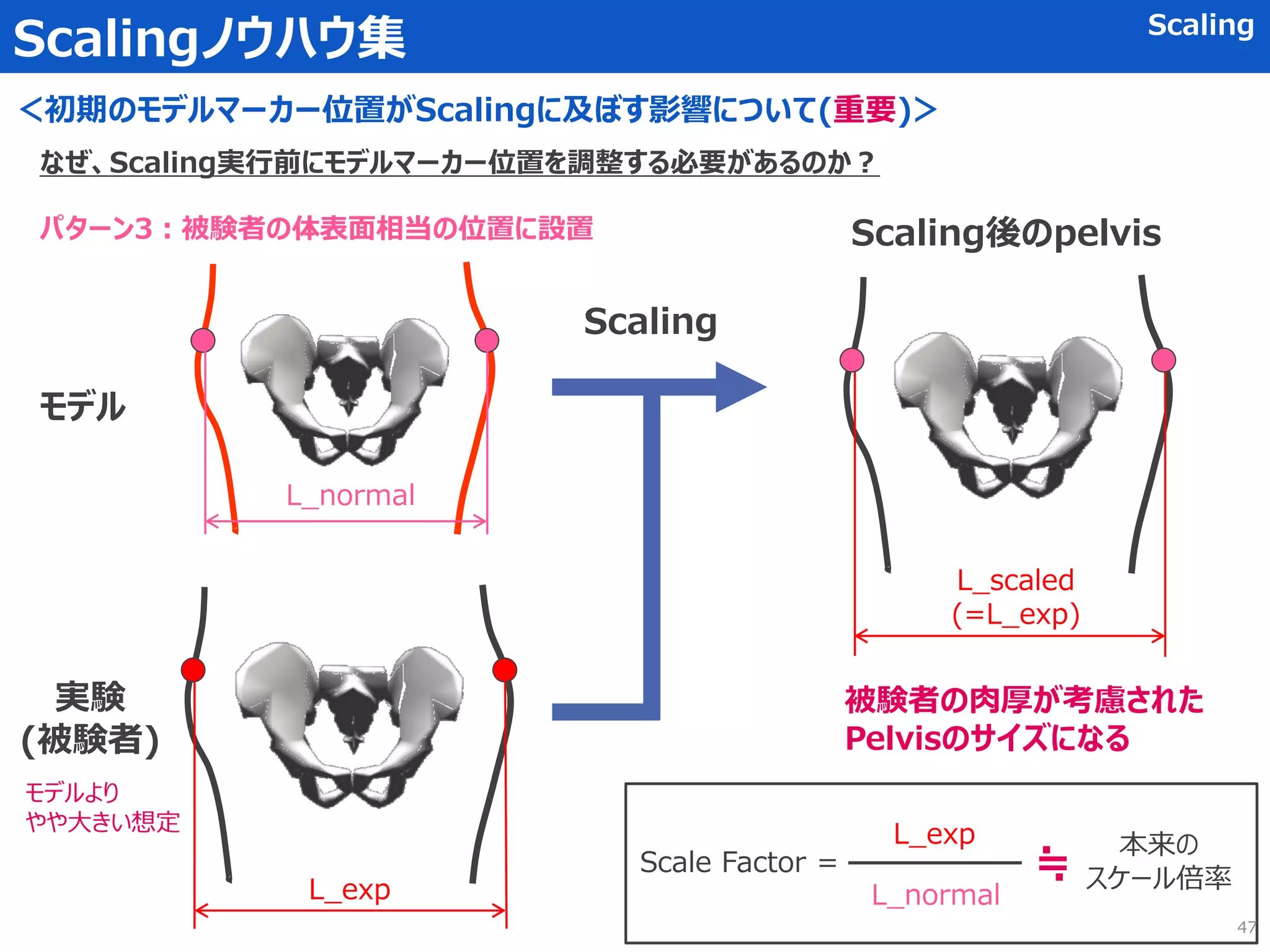
1st:[実験のマーカー間距離 / モデルのマーカー間距離の比率] or [手動]で設定したScaling Factorに応じて
各骨(Body)の 位置寸法、質量中心、力の適用点、筋肉の取り付け位置がスケーリングされる
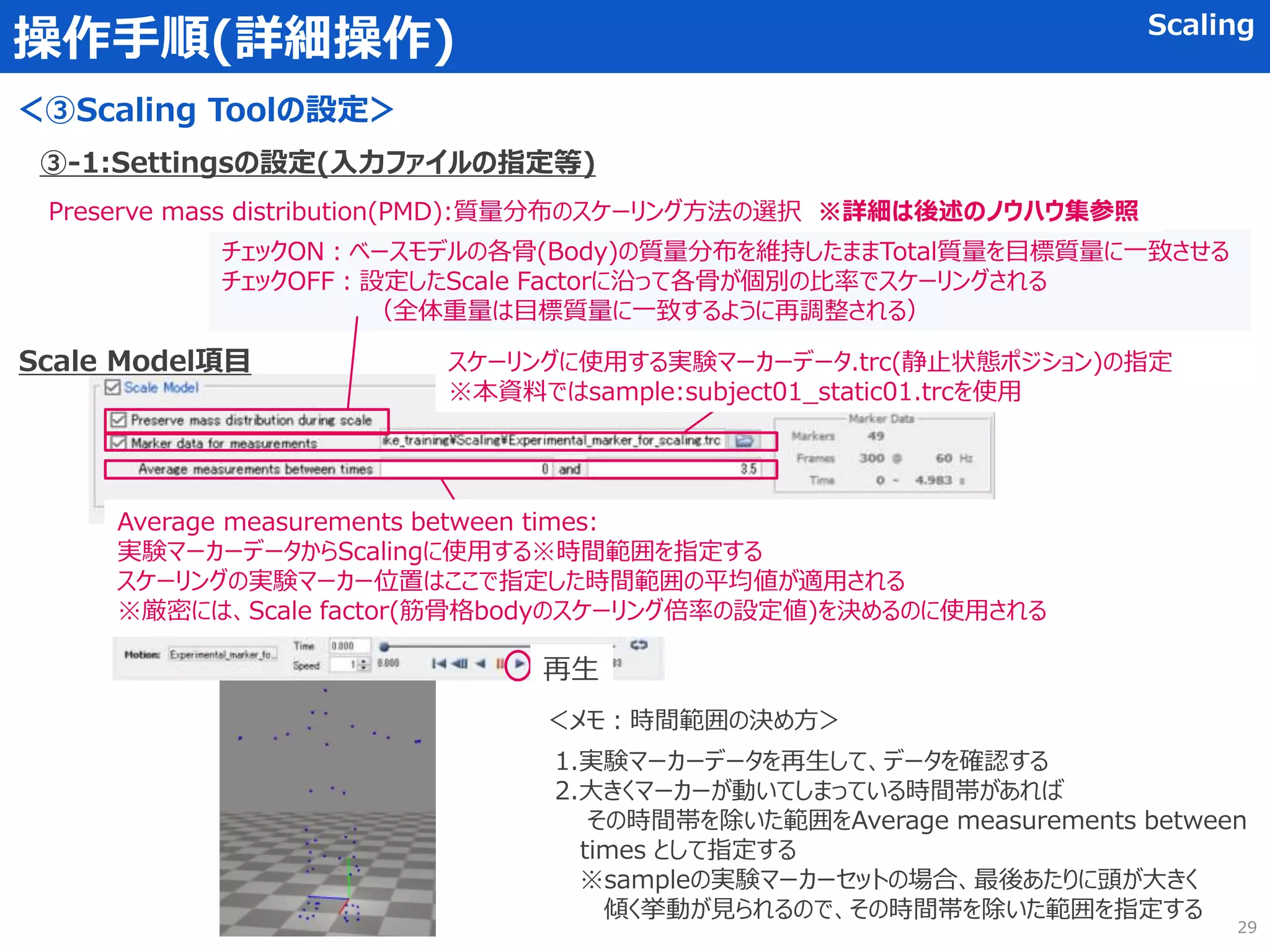
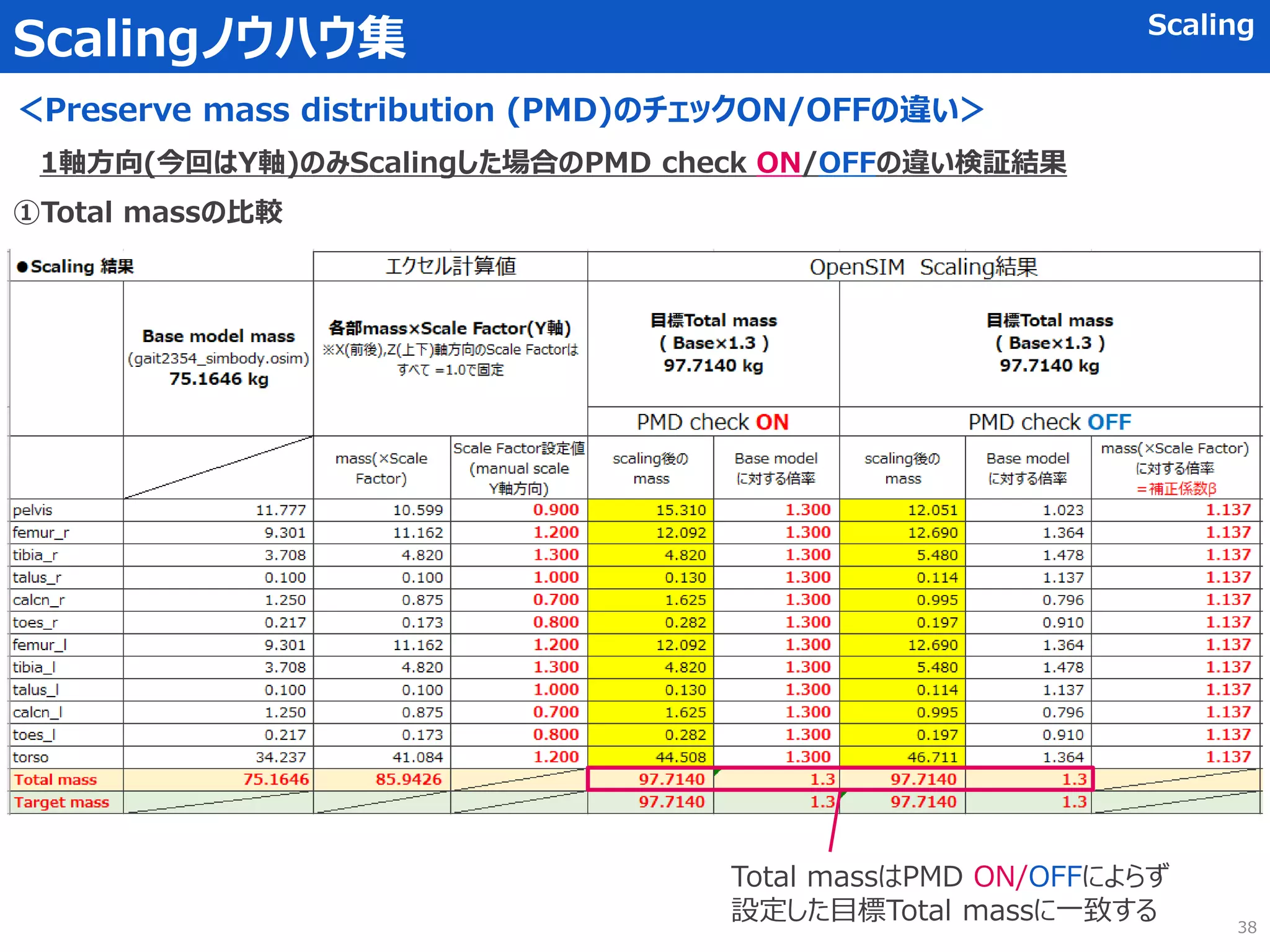
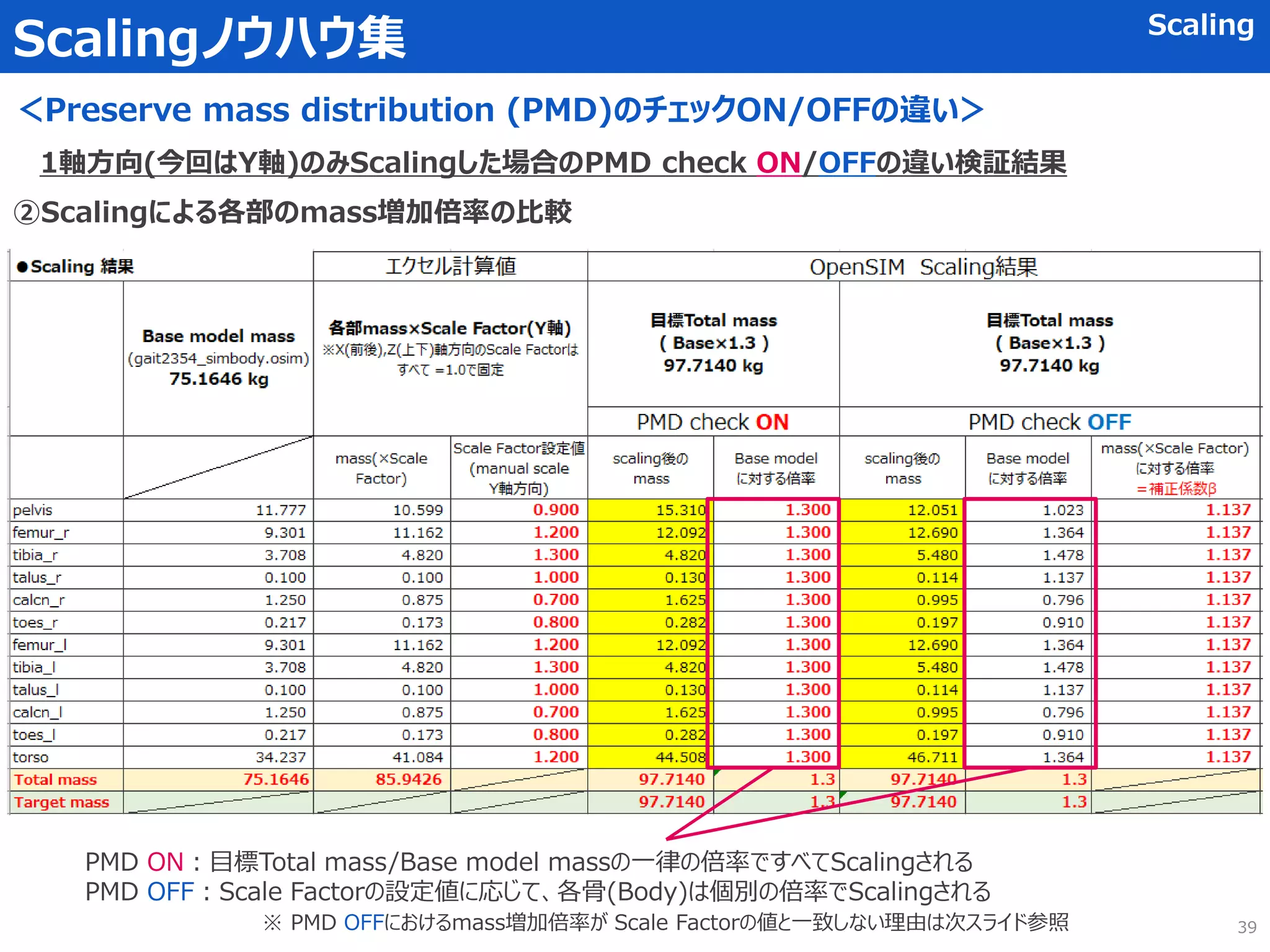
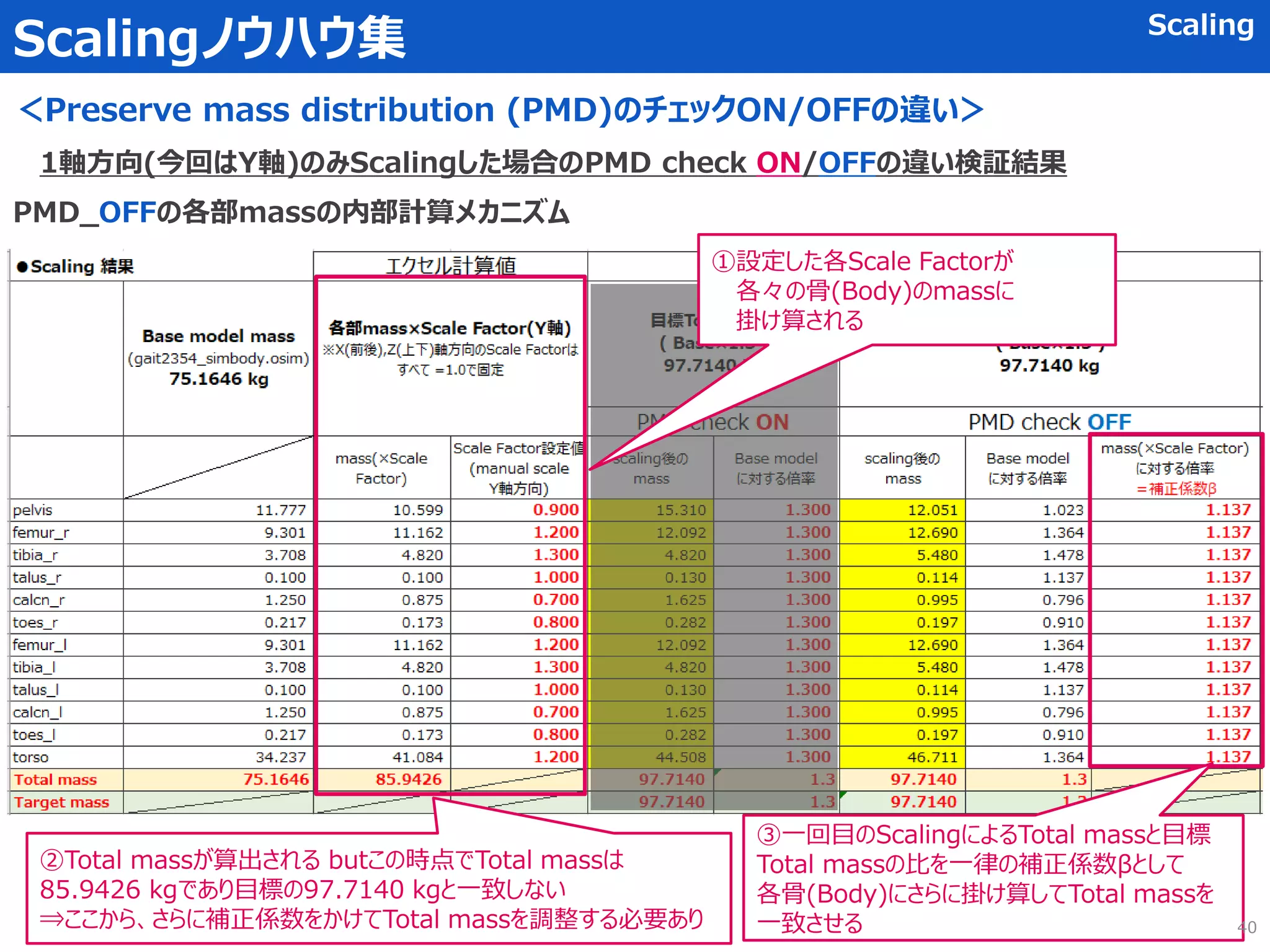
2nd:設定条件(Scaling factor、Target質量、質量分布を保持するorしない)に応じて
各骨(Body)の質量・慣性マスがスケーリングされる
3rd:靭帯や筋肉のアクチュエータ等、距離や長さに依存する要素が調整される
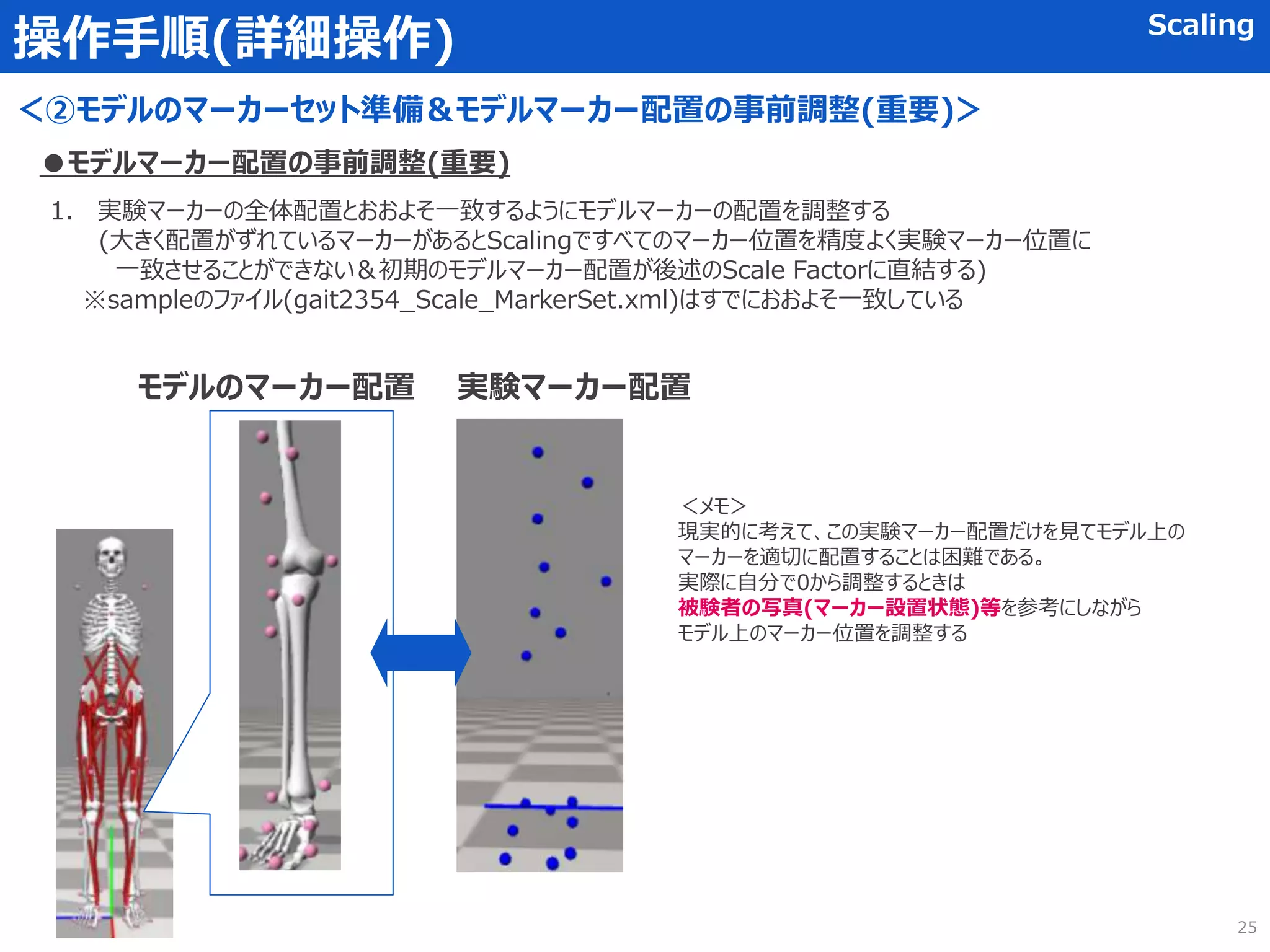
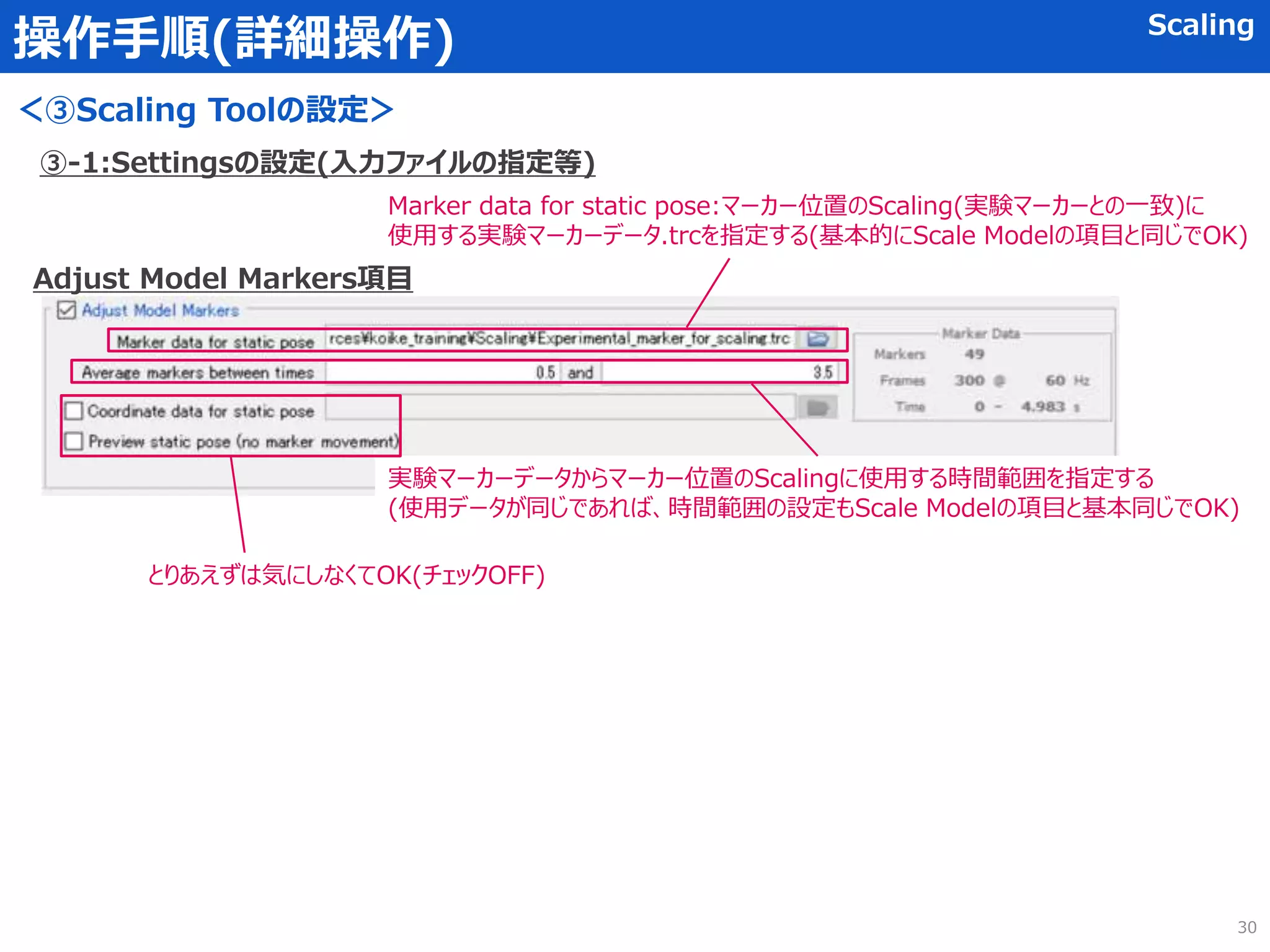
4th:静的なポーズで、モデルのマーカー位置を実験マーカー位置に一致させる
(内部の計算ではIKによりマーカー位置と一般化座標から静的ポーズが算出されている)
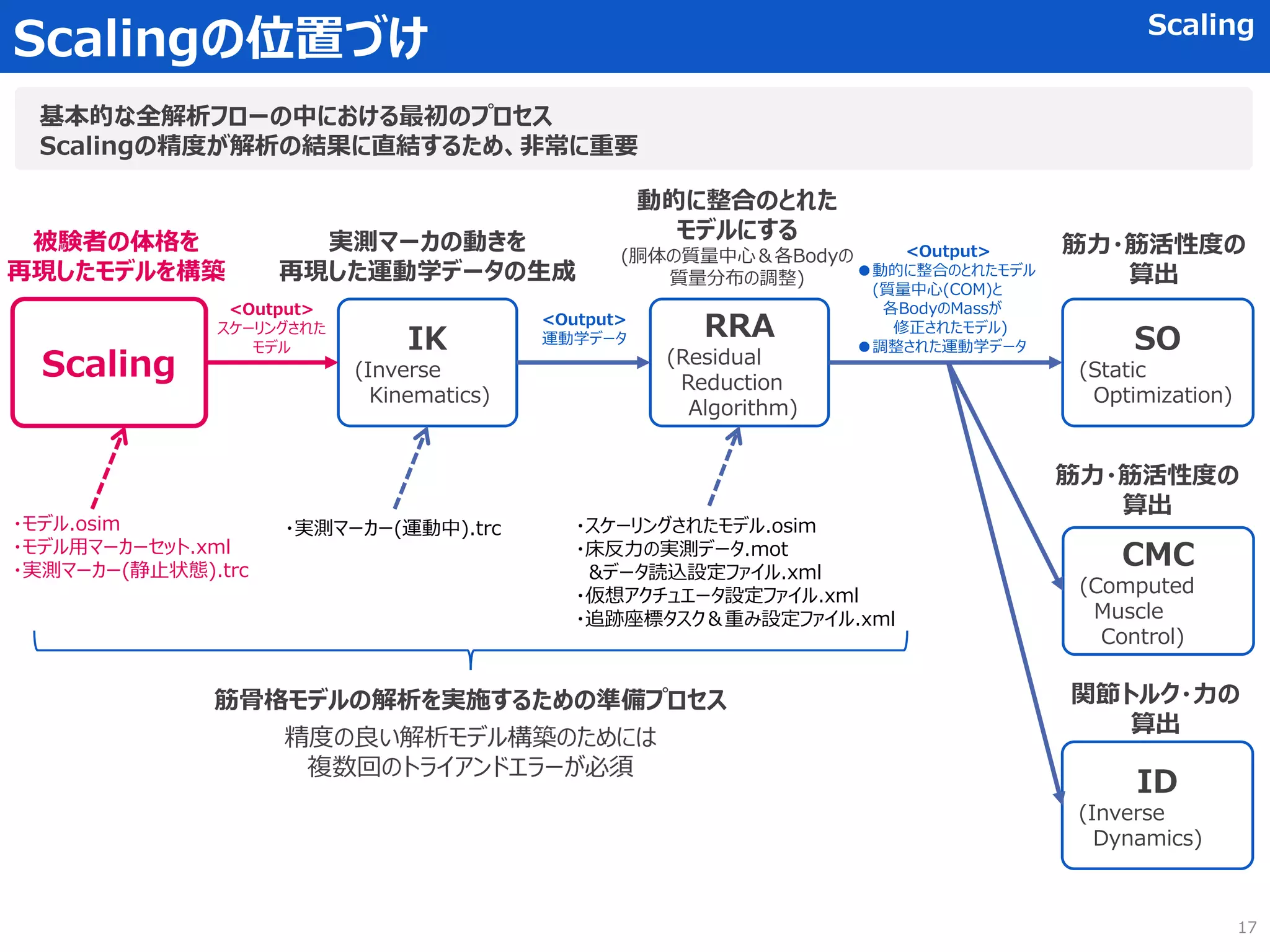
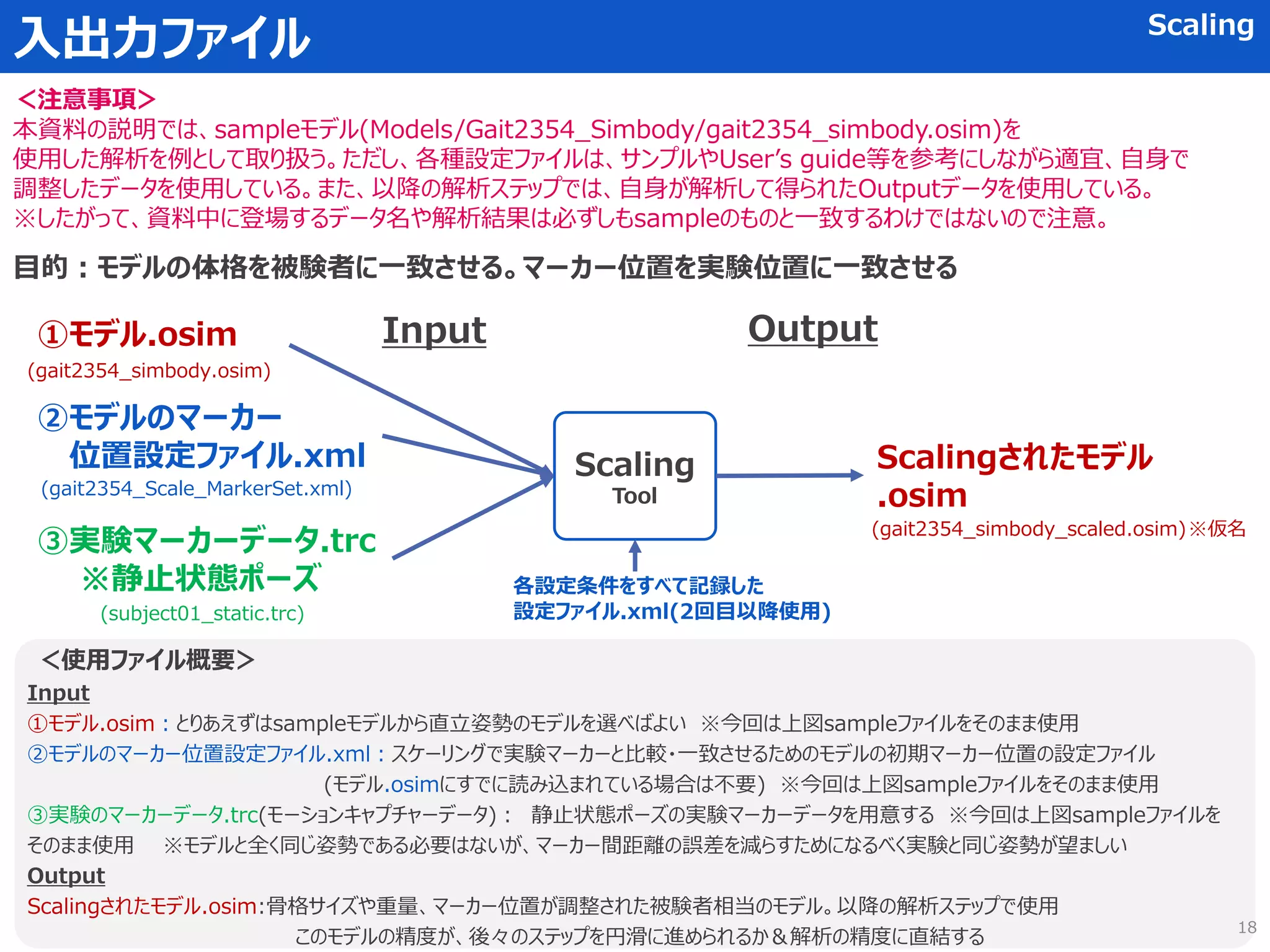
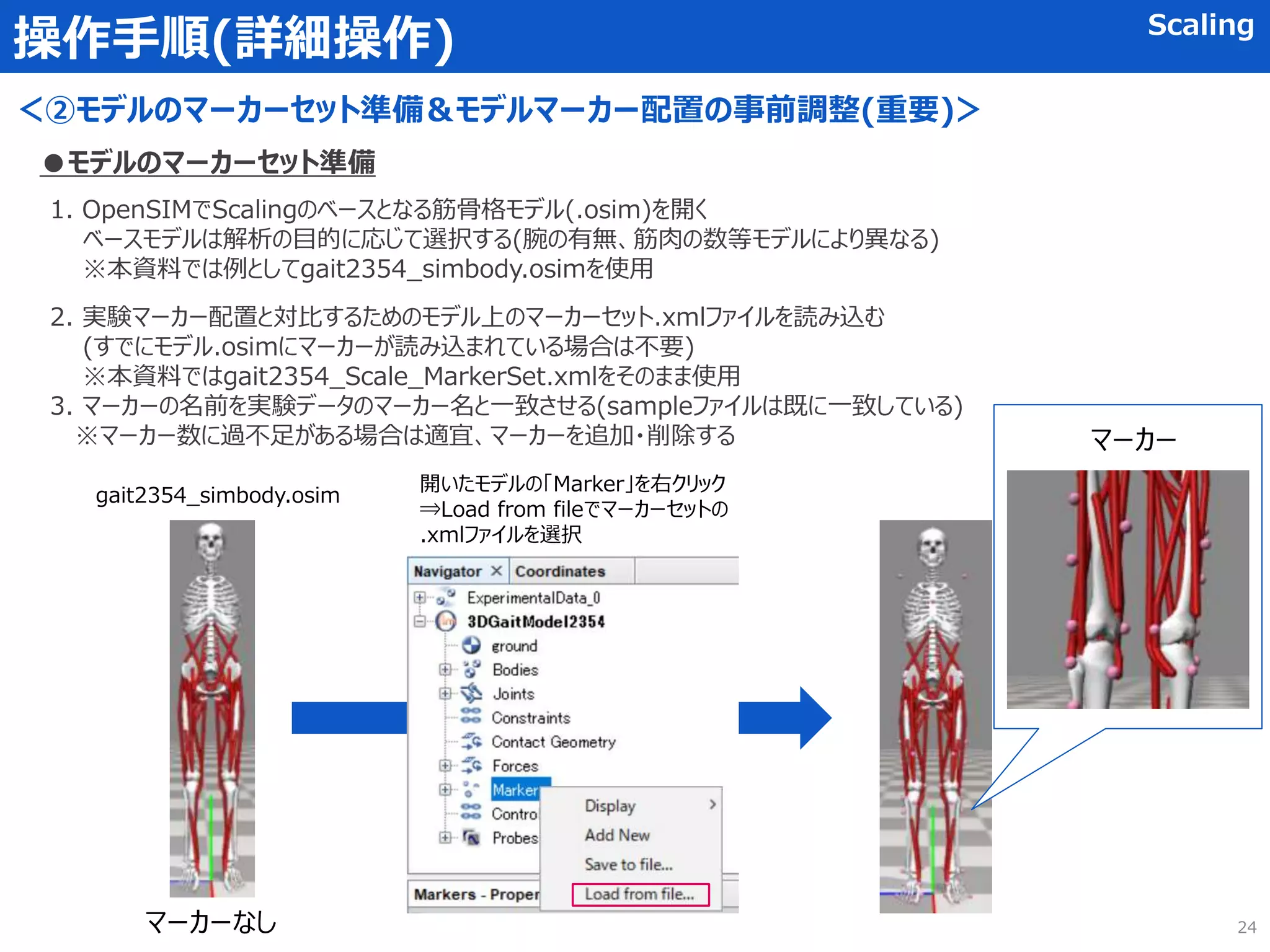
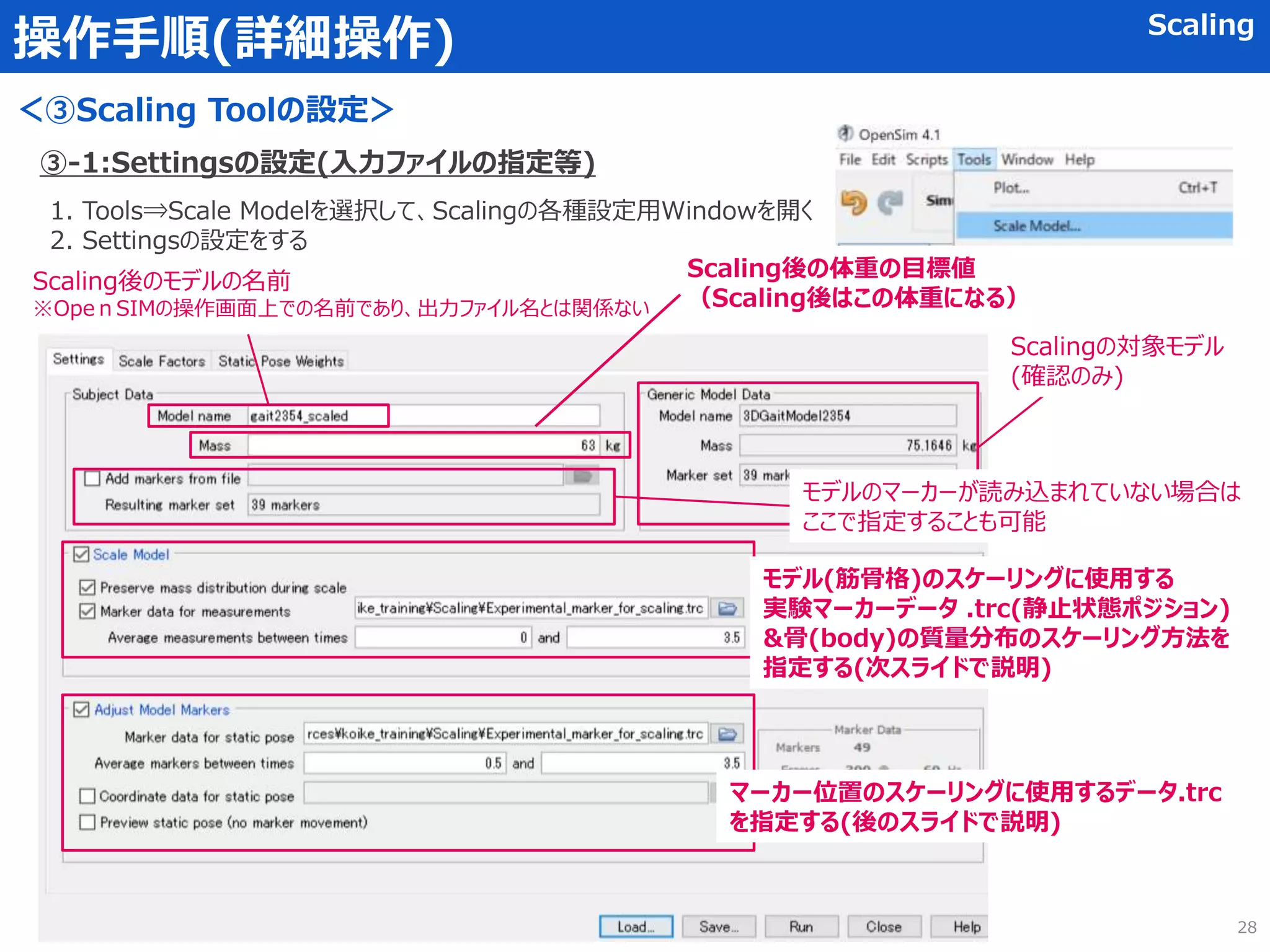
モデルの体格を被験者に一致させる
マーカー位置を実験位置に一致させる
①モデル.osim(サンプルから選べばよい)
②モデルのマーカー位置設定ファイル.xml(モデル.osimに読み込まれている場合は不要)
③実験のマーカーデータ.trc(モーションキャプチャーデータ) ※静止状態のポーズ
※モデルと全く同じ姿勢である必要はないが、マーカー間距離の誤差を減らすためになるべく実験と同じ姿勢が望ましい
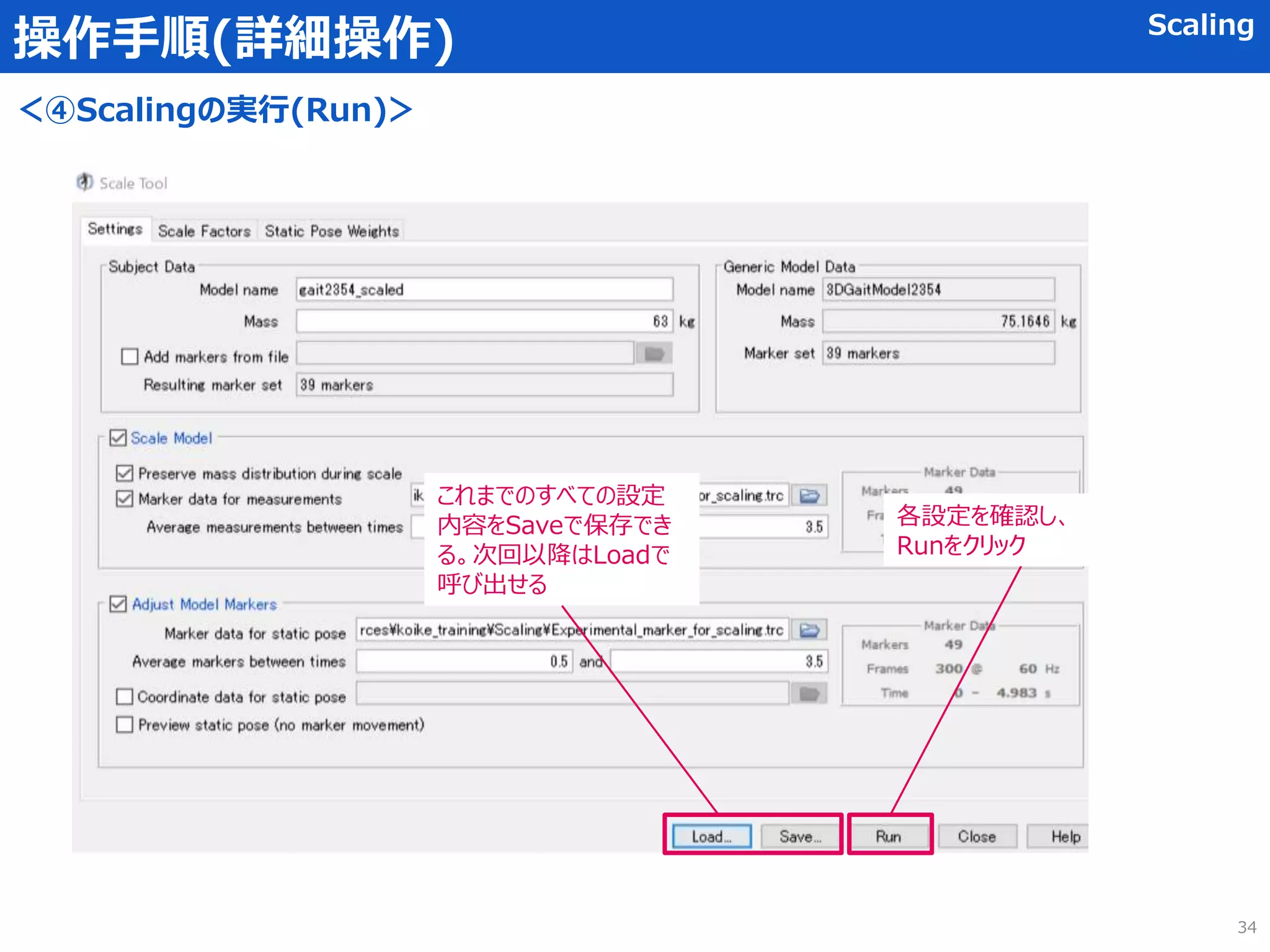
+α(2回目の解析以降):Scale tool setting file .xml⇒各設定条件がすべて保存されているので便利
基本、2回目以降はこの設定ファイルをLoadして必要な箇所だけ修正して解析を行う
目的:
概要・仕組み:
必要ファイル:
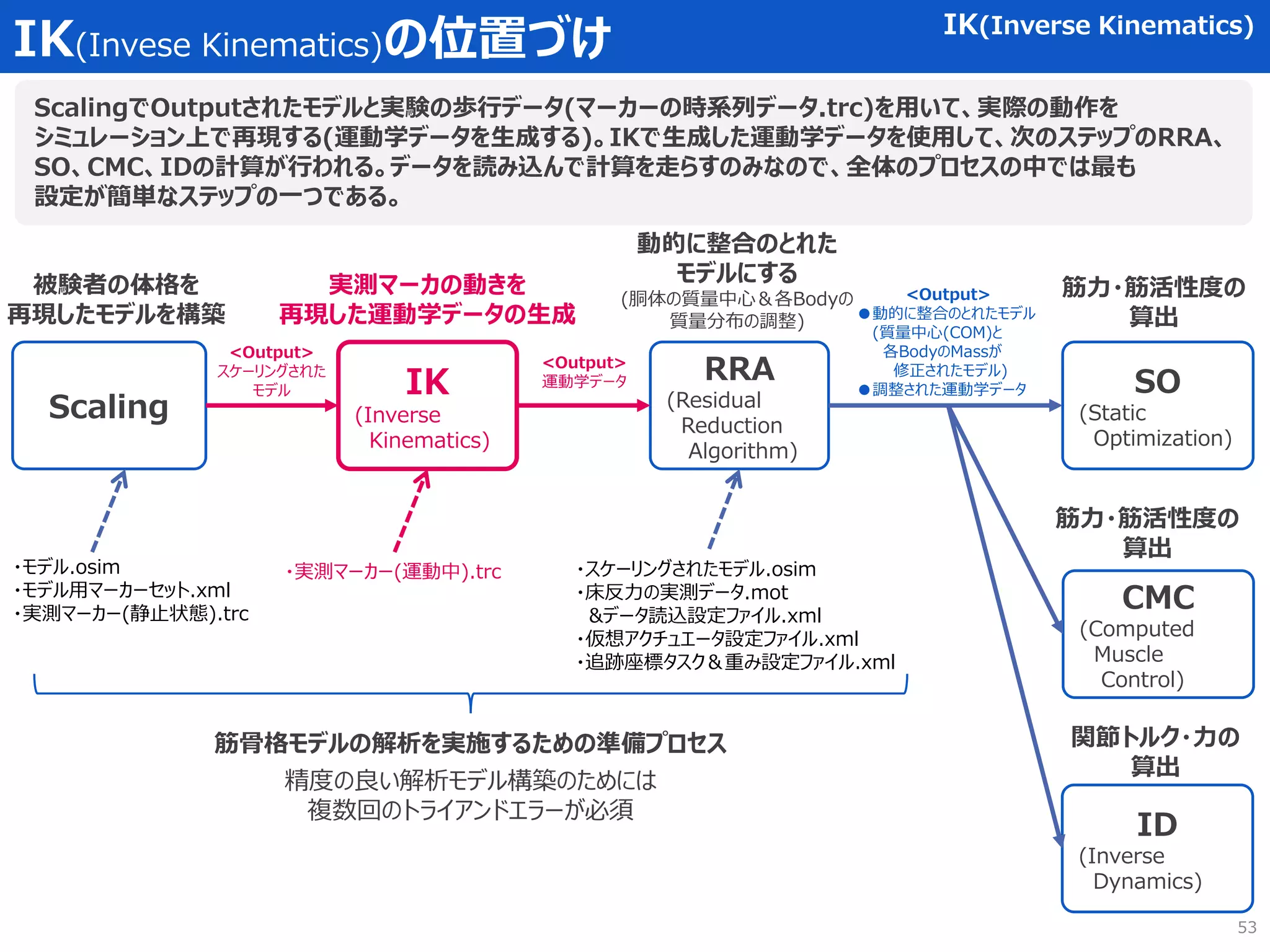
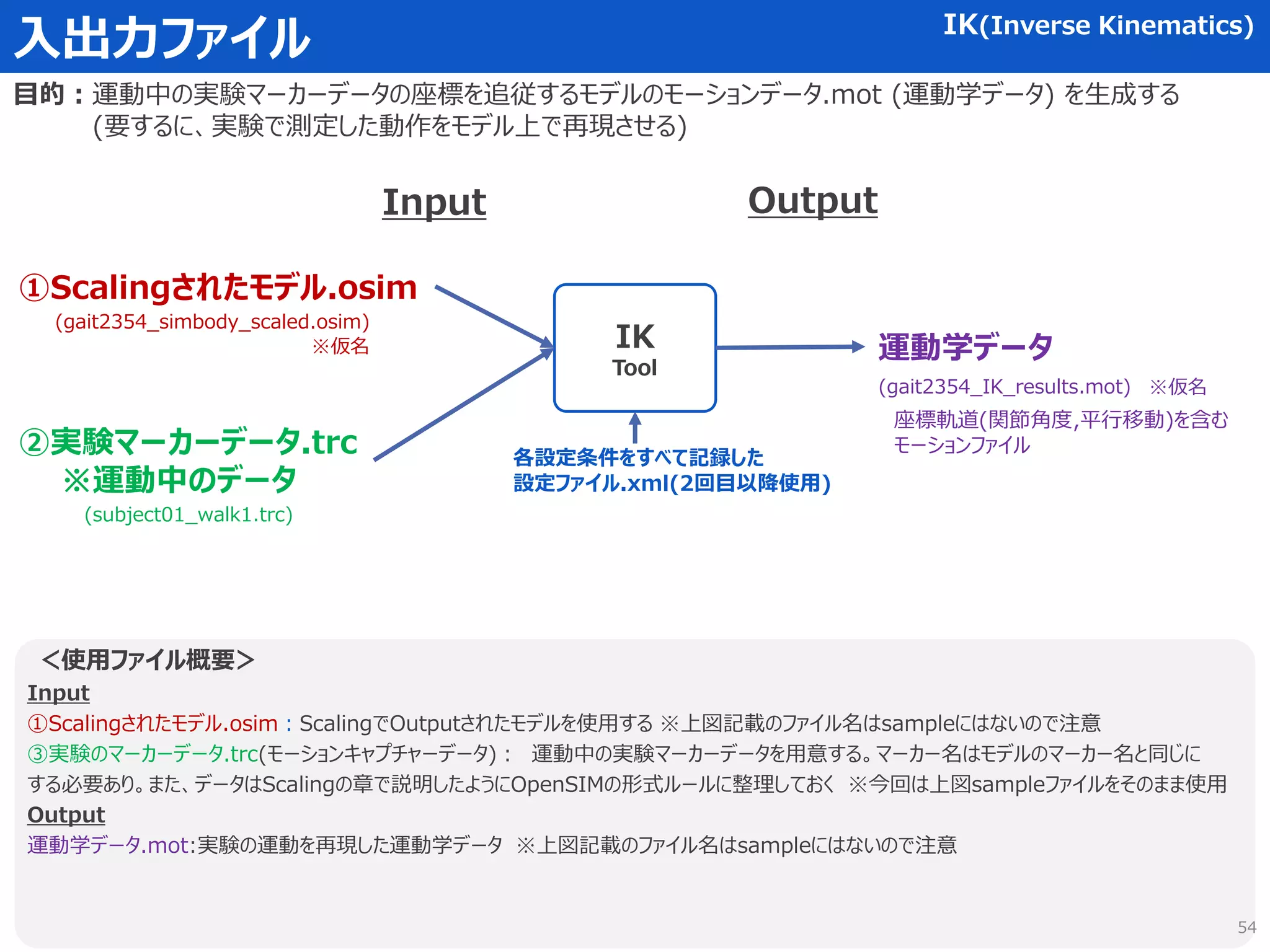
運動中の実験マーカーデータの座標を追従するモデルのモーションデータ.mot (運動学データ) を生成する
(要するに、実験で測定した動作をモデル上で再現させる)
①スケーリングされたモデル.osim
②実験のマーカーデータ.trc(モーションキャプチャーデータ) ※運動中のデータ
+α(2回目の解析以降):IK tool setting file .xml(各設定条件がすべて保存されているファイル)
運動中の各timeステップごとに、実験マーカーの位置座標とよく一致するモデル姿勢(各関節角度)が計算される
(マーカーや座標の重み付き二乗誤差の合計を最小化する計算により、最適な姿勢を算出する)
逆運動学(Inverse Kinematics)なので、あくまで図形的な位置関係を計算しており、力の概念はここではまだ登場しない
全体概要
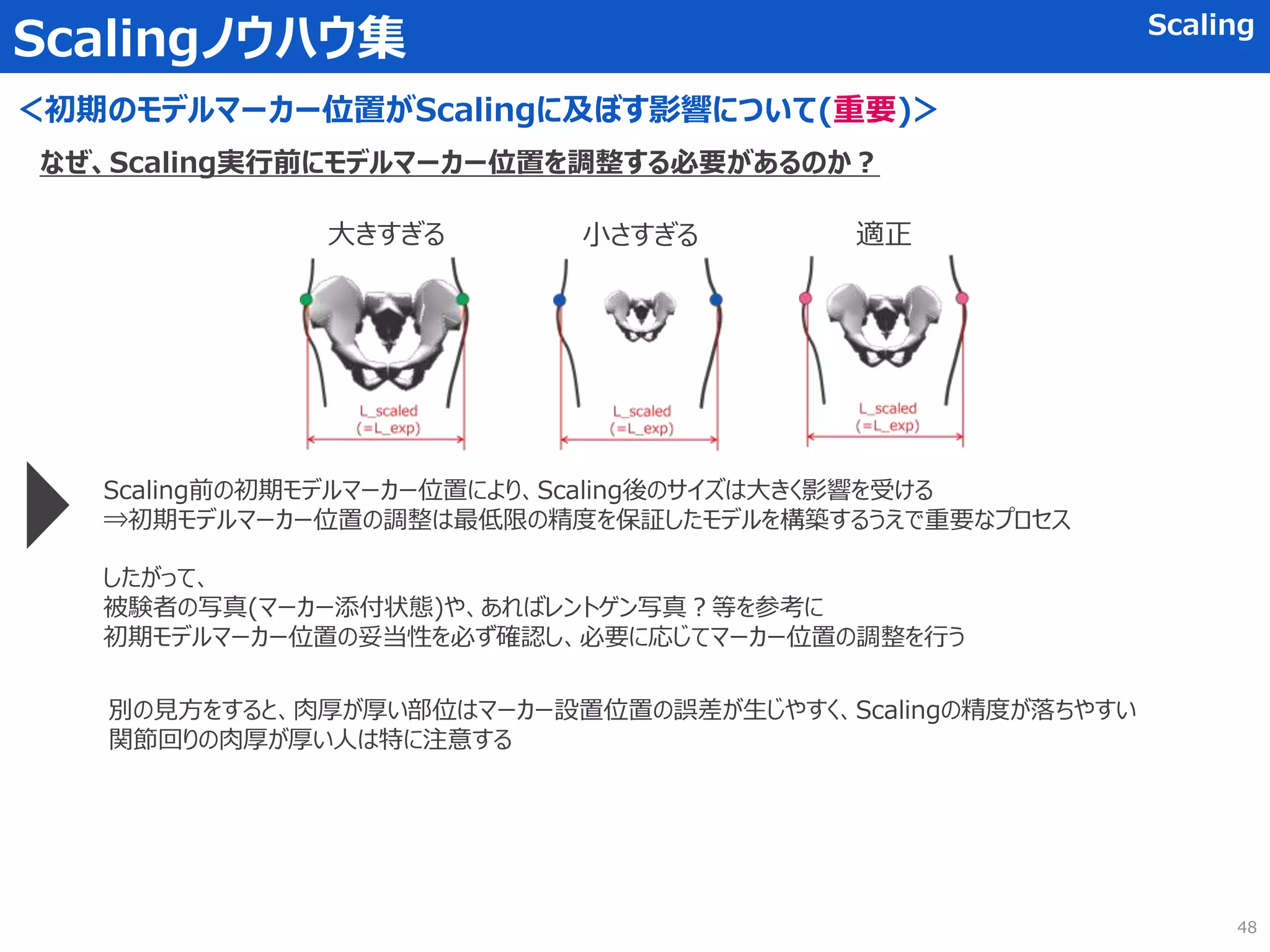
マーカーデータのみでまともな解析精度を保証するモデルを構築するのは難易度高い。
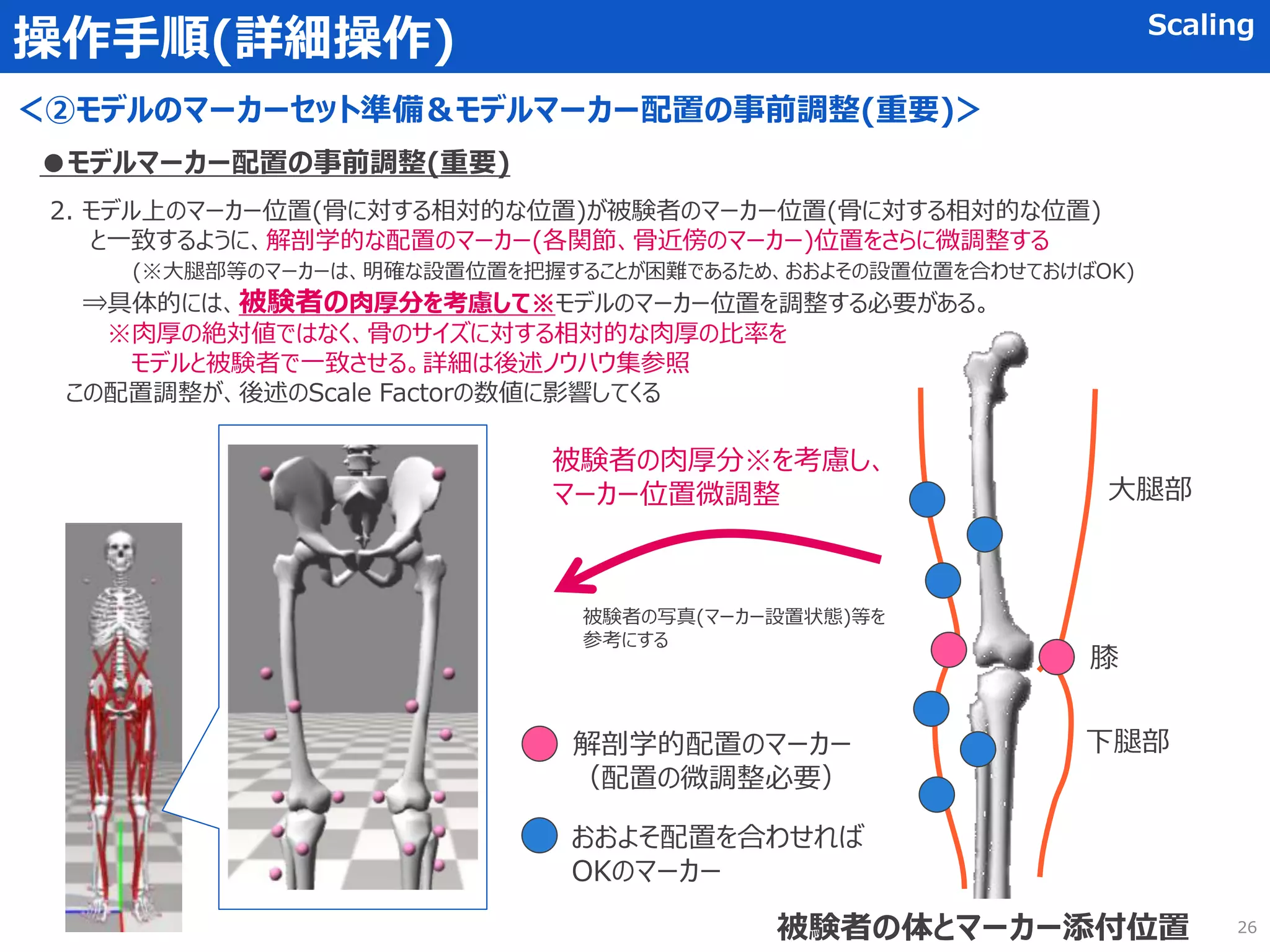
可能な限り、被験者の体格を精度よく推定するための実データや解剖学的な知見等が必要
(例:マーカー取り付け状態での被験者の写真、用意可能ならレントゲン等(骨のサイズ感把握))
IKは特に難しくない。必要データをそろえればすぐにできる
12](https://image.slidesharecdn.com/opensimmanualbasicrev1-210203094910/75/OpenSIM-1-12-2048.jpg)
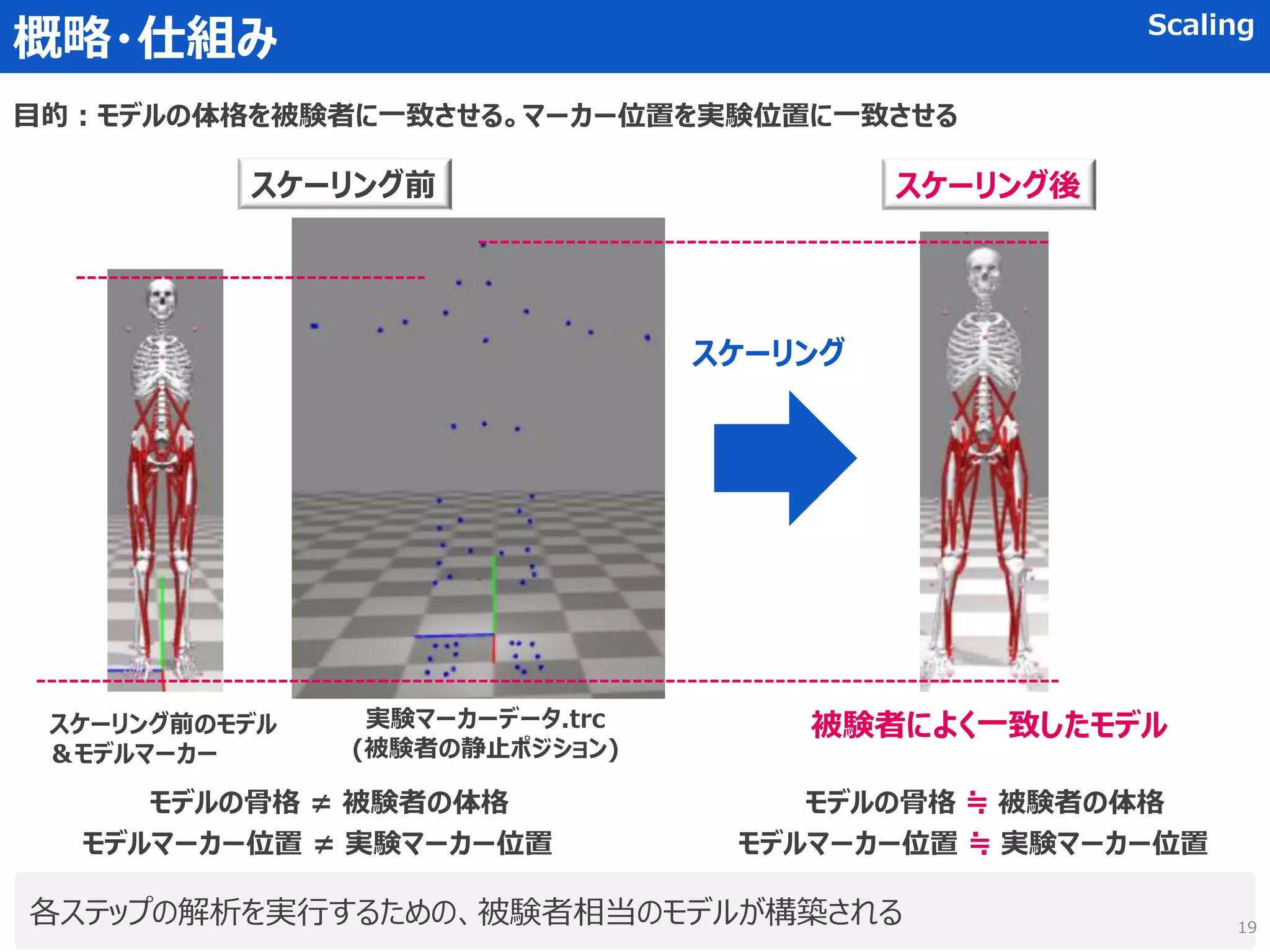
![概略・仕組み Scaling
1st:[実験のマーカー間距離 / モデルのマーカー間距離の比率] or [手動]で
設定したScaling Factorに応じて各骨(Body)の 位置寸法、質量中心、
力の適用点、筋肉の取り付け位置がスケーリングされる
<より詳細なScalingの仕組み>
2nd:設定条件(Scaling factor、Target質量、質量分布を保持するorしない)に応じて
各骨(Body)の質量・慣性マスがスケーリングされる
3rd:靭帯や筋肉のアクチュエータ等、距離や長さに依存
する要素が調整される
4th:静的なポーズで、モデルのマーカー位置を実験マーカー位置に一致させる
(内部の計算ではIKによりマーカー位置と一般化座標から静的ポーズが算出されている)
※内部的な計算の仕組み説明であり、実際の操作手順を示しているわけではないので注意
筋骨格モデルの
Scaling
マーカー位置の
調整
20](https://image.slidesharecdn.com/opensimmanualbasicrev1-210203094910/75/OpenSIM-1-20-2048.jpg)

![概略・仕組み IK(Inverse Kinematics)
目的:運動中の実験マーカーデータの座標を追従するモデルのモーションデータ.mot (運動学データ) を生成する
(要するに、実験で測定した動作をモデル上で再現させる)
Scalingされたモデル
(被験者相当の筋骨格モデル)
運動中の
実験マーカーデータ
実験のマーカーデータの動作を
追従する運動学データを生成
逆運動学
計算
逆運動学計算により、マーカーや座標の重み付き2乗誤差の合計(Squared Error)を最小化
⇒各timeステップにおいて、実験マーカーとモデルマーカーが最適に一致する姿勢を計算する
𝑆𝑞𝑢𝑎𝑟𝑒𝑑 𝐸𝑟𝑟𝑜𝑟 =
𝑖=1
𝑚𝑎𝑟𝑘𝑒𝑟𝑠
𝜔𝑖 𝑥𝑖
𝑠𝑢𝑏𝑗𝑒𝑐𝑡
− 𝑥𝑖
𝑚𝑜𝑑𝑒𝑙
2
+
𝑗=1
𝑗𝑜𝑖𝑛𝑡 𝑎𝑛𝑔𝑙𝑒𝑠
𝜔𝑗 𝜃𝑗
𝑠𝑢𝑏𝑗𝑒𝑐𝑡
− 𝜃𝑗
𝑚𝑜𝑑𝑒𝑙
2
x : マーカー座標位置
θ :関節角度
Subject : 被験者マーカーの数値
model :モデルマーカーの数値
[Ref.1]
[Ref.1]: Scott L. Delp*, Frank C. Anderson, Allison S. Arnold, Peter Loan, Ayman Habib, Chand T. John, Eran Guendelman, and Darryl G. Thelen,
“OpenSim: Open-Source Software to Create and Analyze Dynamic Simulations of Movement”, IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 54, NO.11,
NOV. 2007
ω : 重み係数
55](https://image.slidesharecdn.com/opensimmanualbasicrev1-210203094910/75/OpenSIM-1-55-2048.jpg)
![概略・仕組み RRA(Residual Reduction Algorithm)
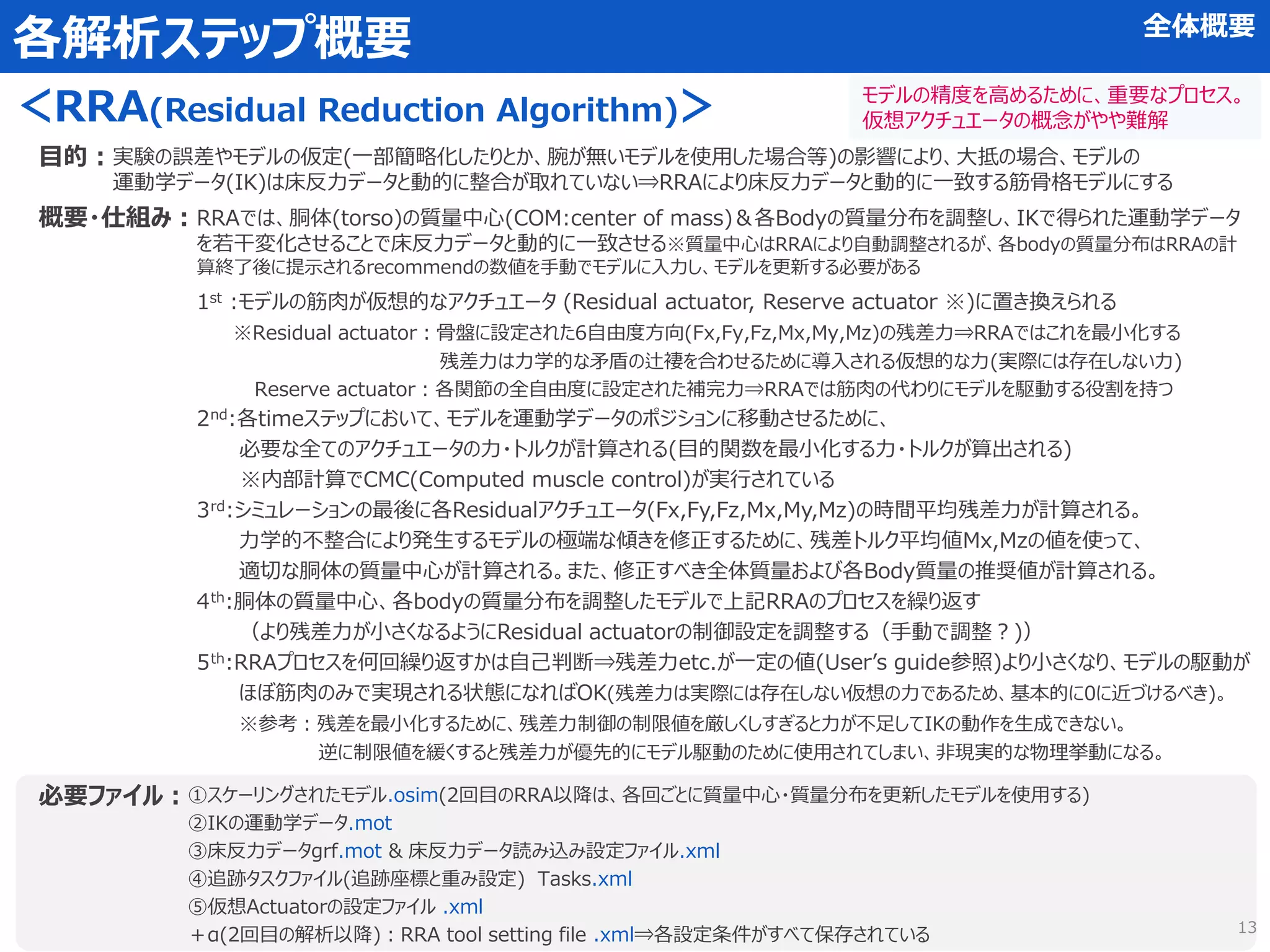
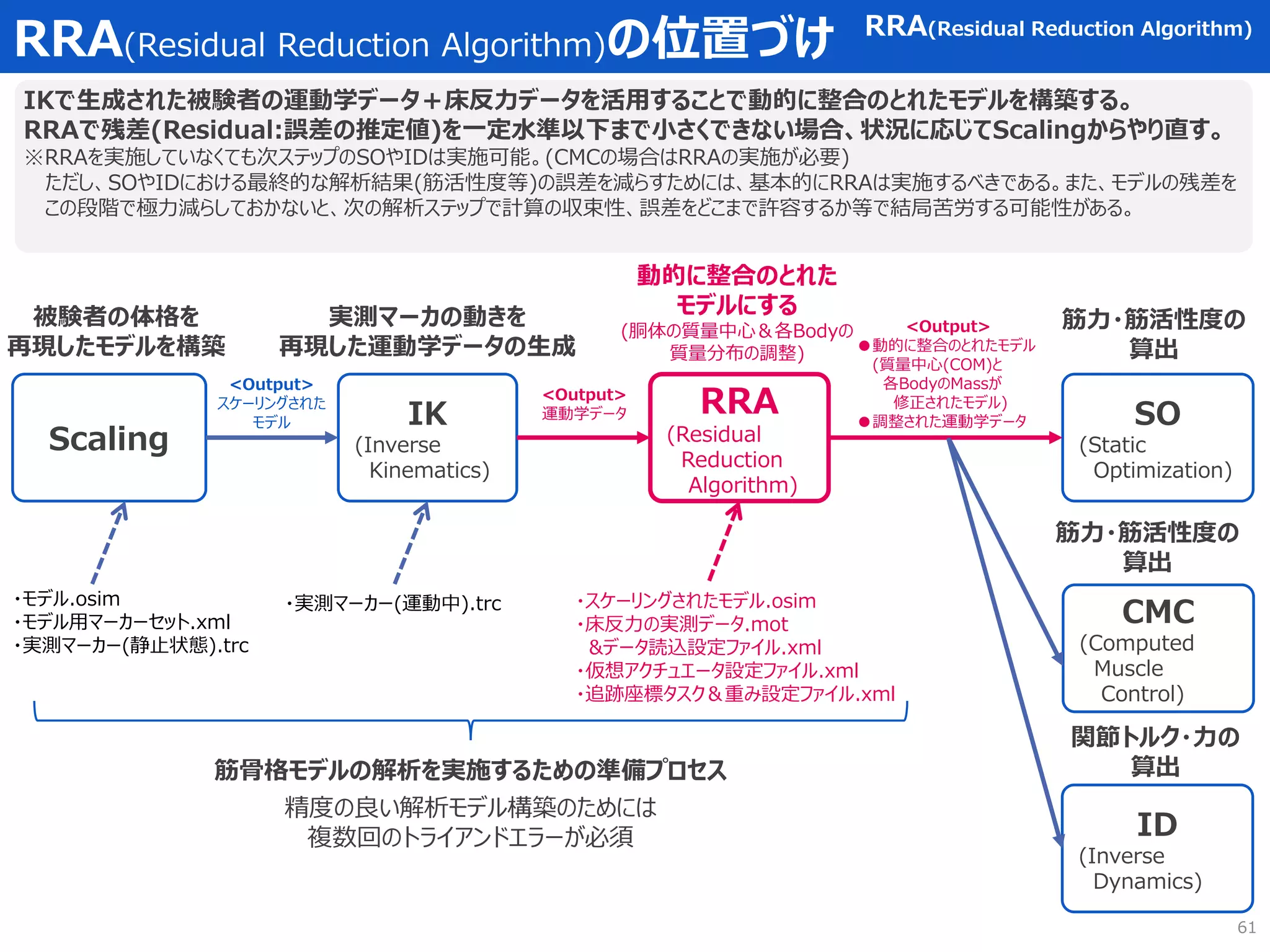
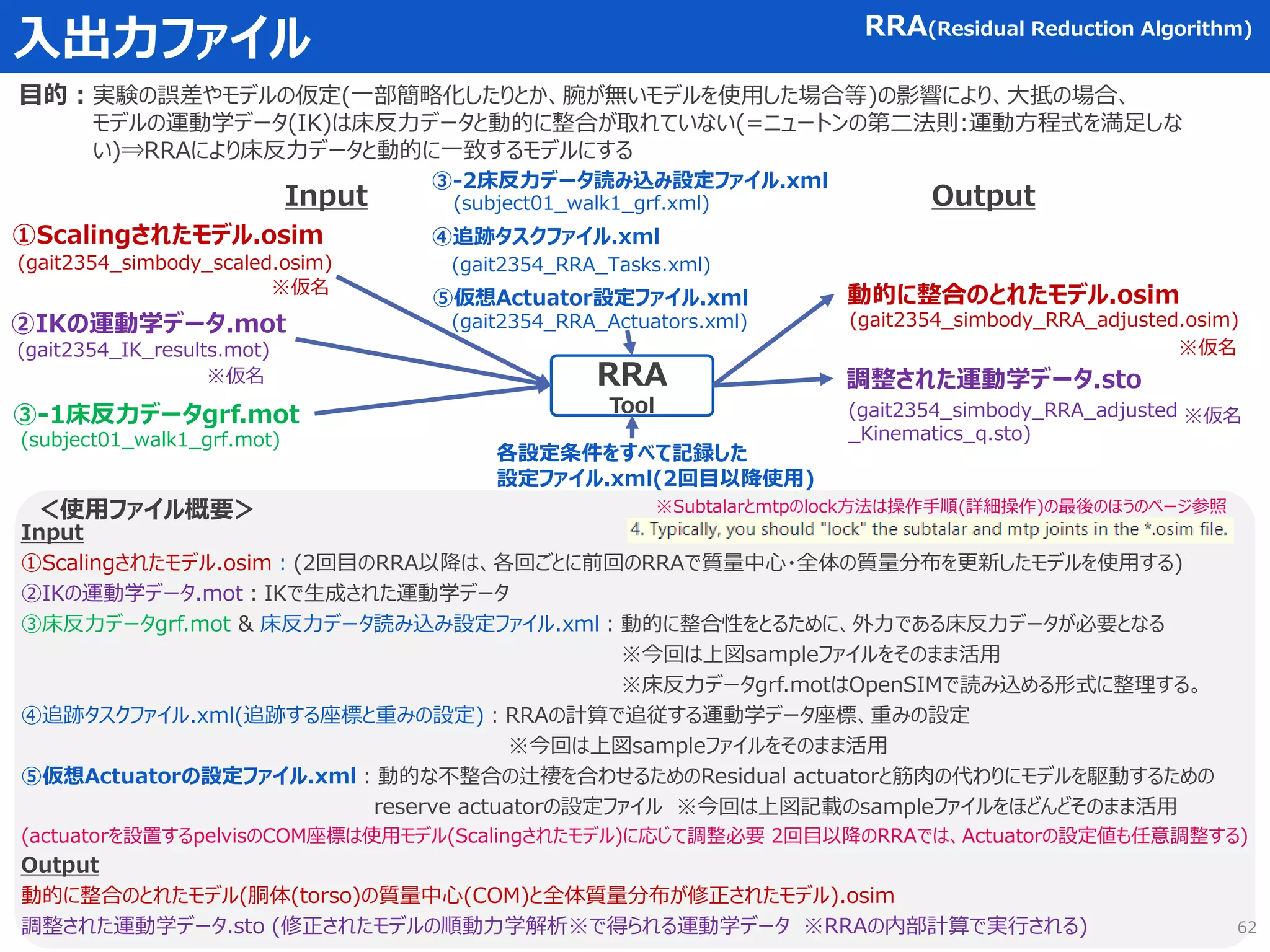
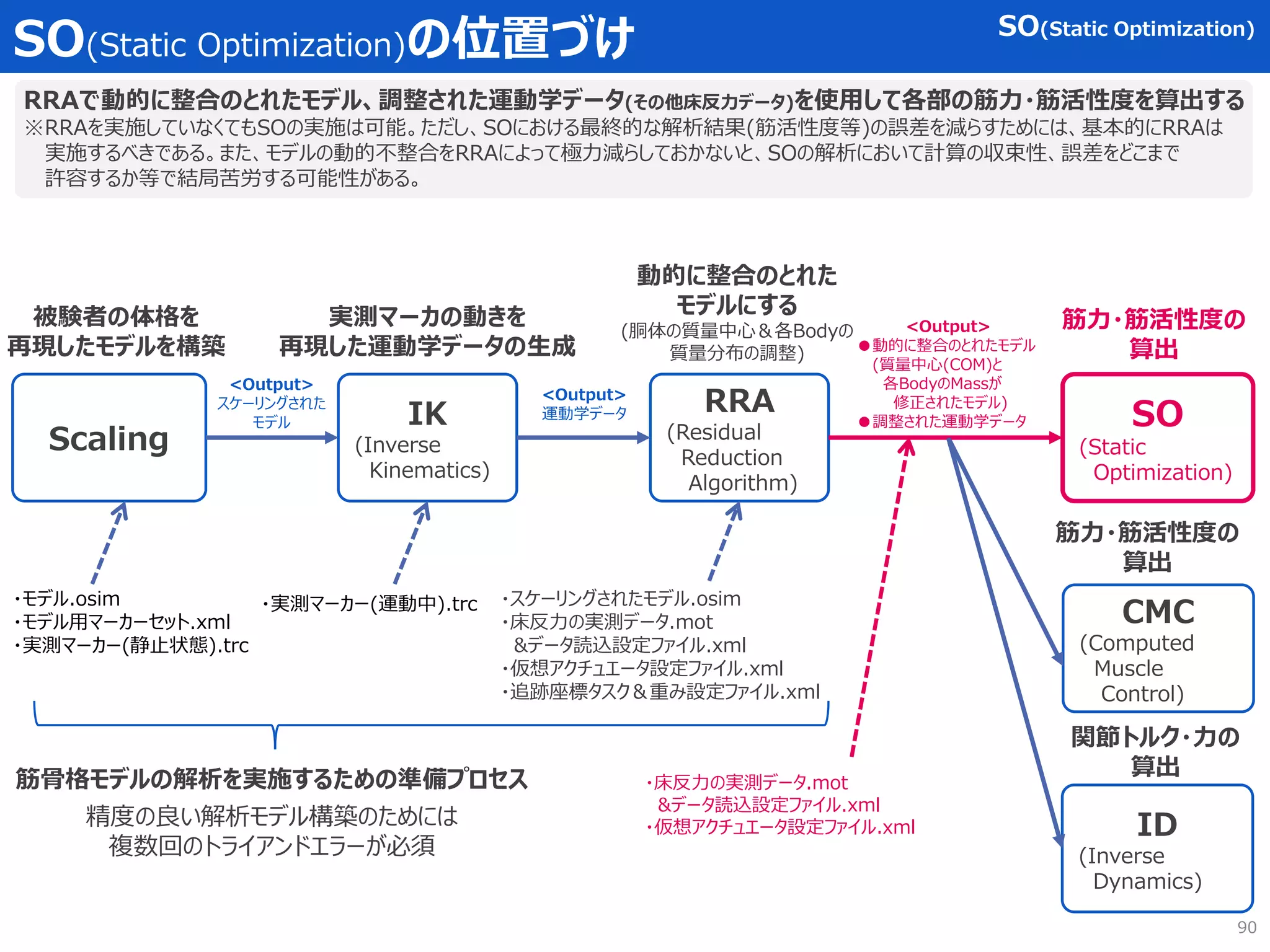
目的:実験の誤差やモデルの仮定(一部簡略化したりとか、腕が無いモデルを使用した場合等)の影響により、大抵の場合、
モデルの運動学データ(IK)は床反力データと動的に整合が取れていない(=ニュートンの第二法則:運動方程式を満足
しない)⇒RRAにより床反力データと動的に一致するモデルにする
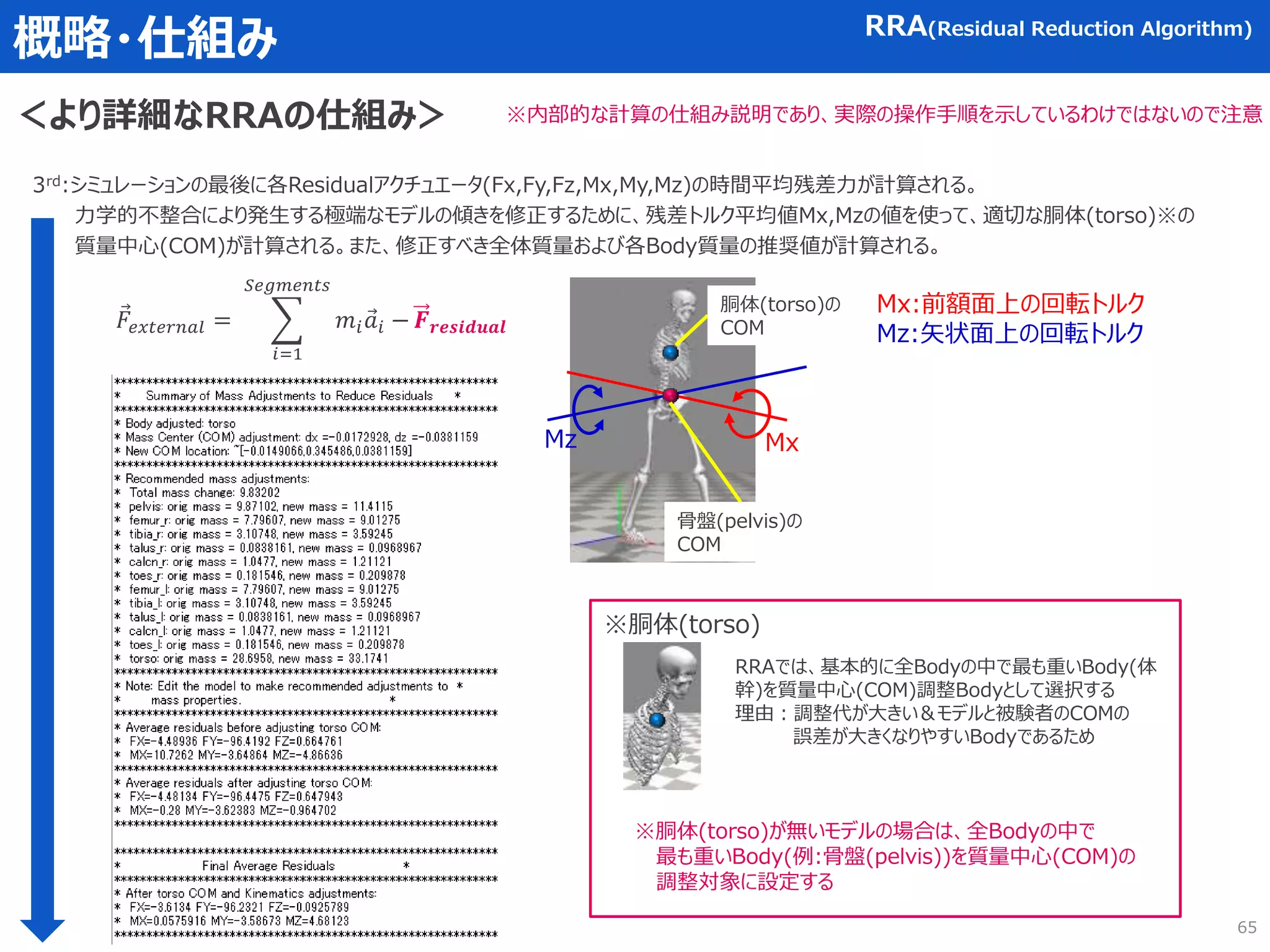
胴体(torso)※1の質量中心(COM:center of mass)&モデルのTotal質量(各Bodyの質量分布※2)を調整し、IKで得られた運動学データ
を調整することで床反力データと動的に一致させる(残差を減らす)。Outputとして、質量中心・質量分布※2が調整されたモデル&調整された運
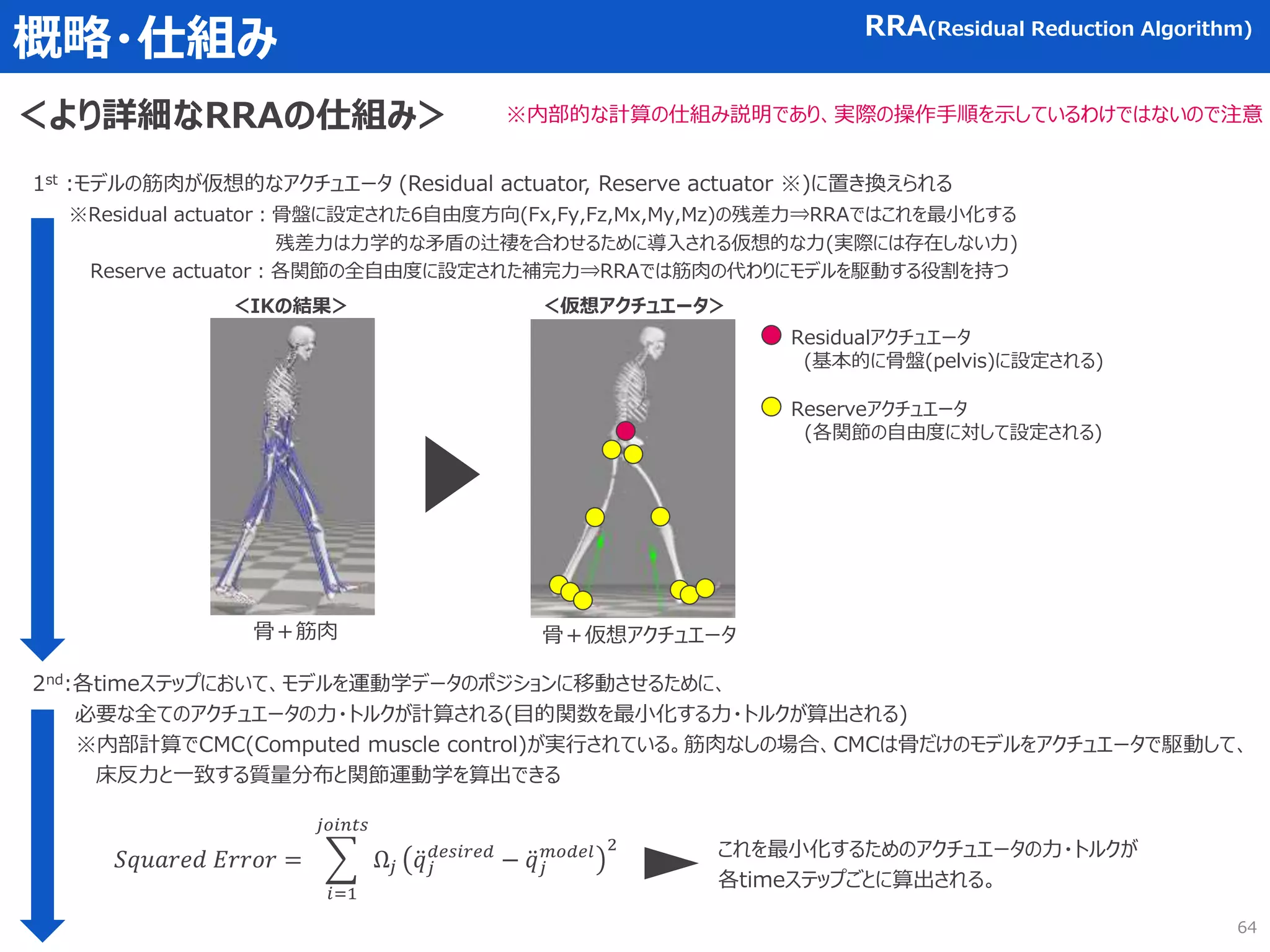
動学データが生成される(次の解析ステップで使用)。RRAでは仮想アクチュエータ(Residual actuator, Reserve actuator)という概念が導入
される。モデルの駆動は筋肉の代わりにReserve actuatorが使用される(要するに筋肉なしの骨だけモデルをReserve actuatorで動かしている)。
Residual actuatorは床反力データに対して力学的に辻褄を合わせる役割を持つ。RRAは、このResidual actuatorの力(残差力)を最小化す
るプロセスである。(⇒力学的な不整合を最小化する) ※1胴体(torso)が無いモデルの場合は、全Bodyの中で最も重いBody(例:骨盤(pelvis))を質量中
心(COM)の調整対象に設定する ※2質量分布は解析結果として得られる推奨値をもとに、手動で調整する必要あり。
𝑆𝑞𝑢𝑎𝑟𝑒𝑑 𝐸𝑟𝑟𝑜𝑟 =
𝑖=1
𝑗𝑜𝑖𝑛𝑡𝑠
Ω𝑗 𝑞𝑗
𝑑𝑒𝑠𝑖𝑟𝑒𝑑
− 𝑞𝑗
𝑚𝑜𝑑𝑒𝑙 2
[Ref.1]
[Ref.1]: Scott L. Delp*, Frank C. Anderson, Allison S. Arnold, Peter Loan, Ayman Habib, Chand T. John, Eran Guendelman, and Darryl G. Thelen,
“OpenSim: Open-Source Software to Create and Analyze Dynamic Simulations of Movement”, IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 54, NO.11,
NOV. 2007
𝐹𝑒𝑥𝑡𝑒𝑟𝑛𝑎𝑙 =
𝑖=1
𝑆𝑒𝑔𝑚𝑒𝑛𝑡𝑠
𝑚𝑖𝑎𝑖 − 𝑭𝒓𝒆𝒔𝒊𝒅𝒖𝒂𝒍
: 外力(床反力)
: 残差力(residual actuatorの力)
: 各Bodyが発生させる力(Body質量×加速度)
:PD制御により決定される各関節の要求加速度
:モデルの各関節の加速度
:各関節の重み係数
IKで得られた運動と床反力データは
力学的に整合が取れていない
仮想アクチュエータで骨だけモデルを駆動
⇒Residual actuatorの力(残差力)を
最小化できるようにモデルを調整する
(胴体の質量中心、全体の質量分布を調整)
Residualアクチュエータ
(役割:力学的不整合の辻褄を合わせる)
Reserveアクチュエータ
(役割:筋肉の代わりにモデルを駆動)
胴体(torso)の
COM
63](https://image.slidesharecdn.com/opensimmanualbasicrev1-210203094910/75/OpenSIM-1-63-2048.jpg)
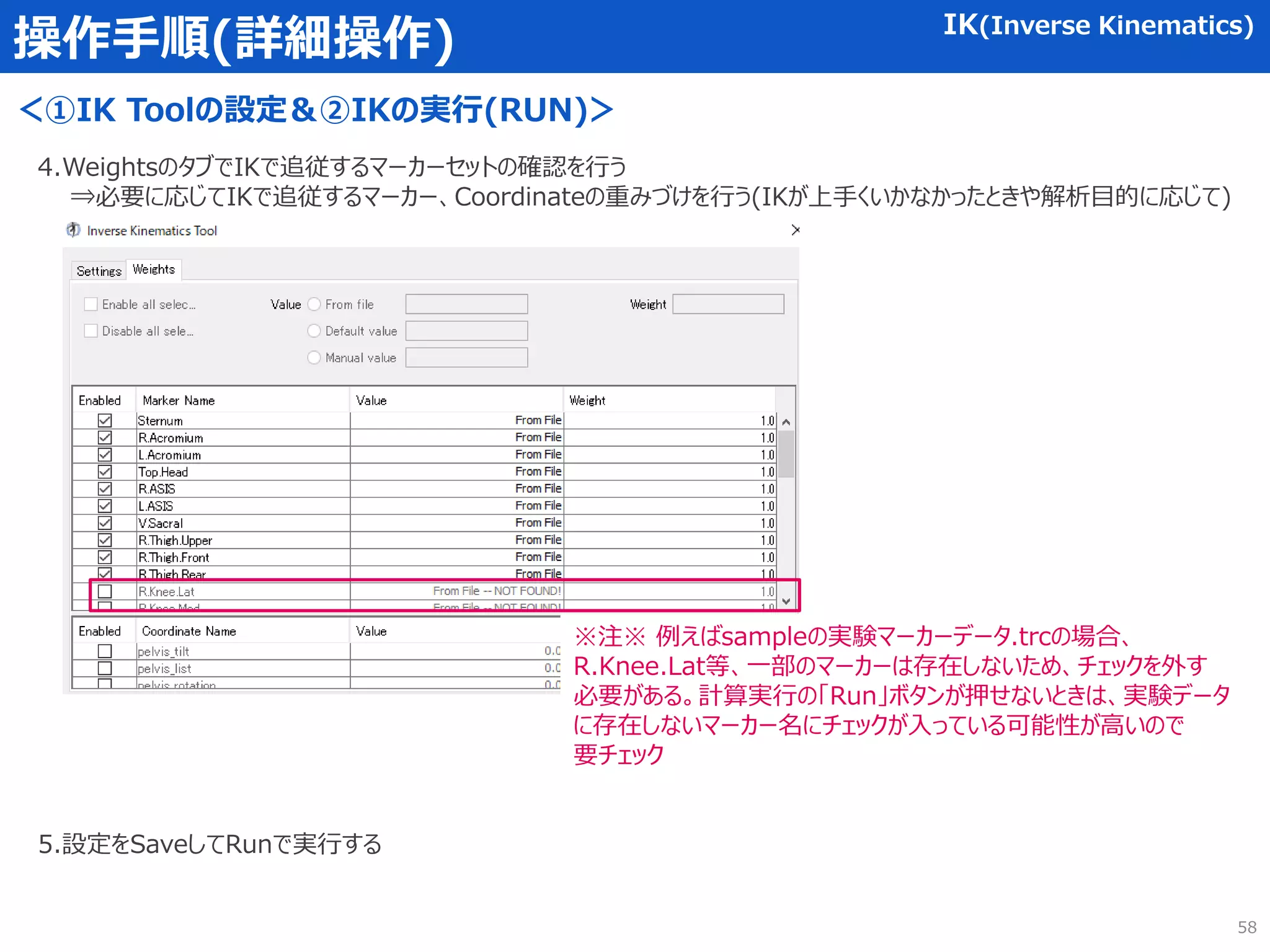
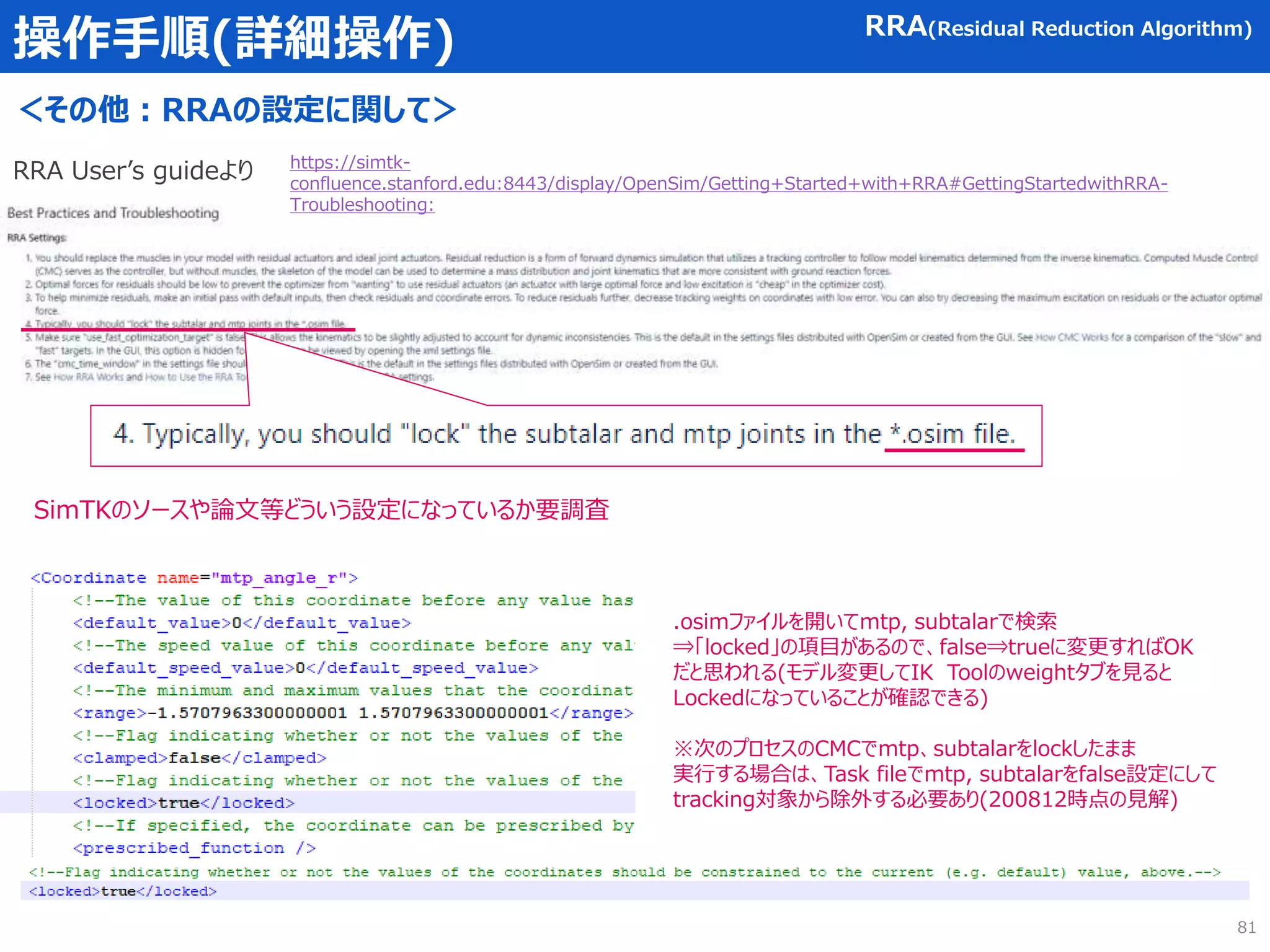
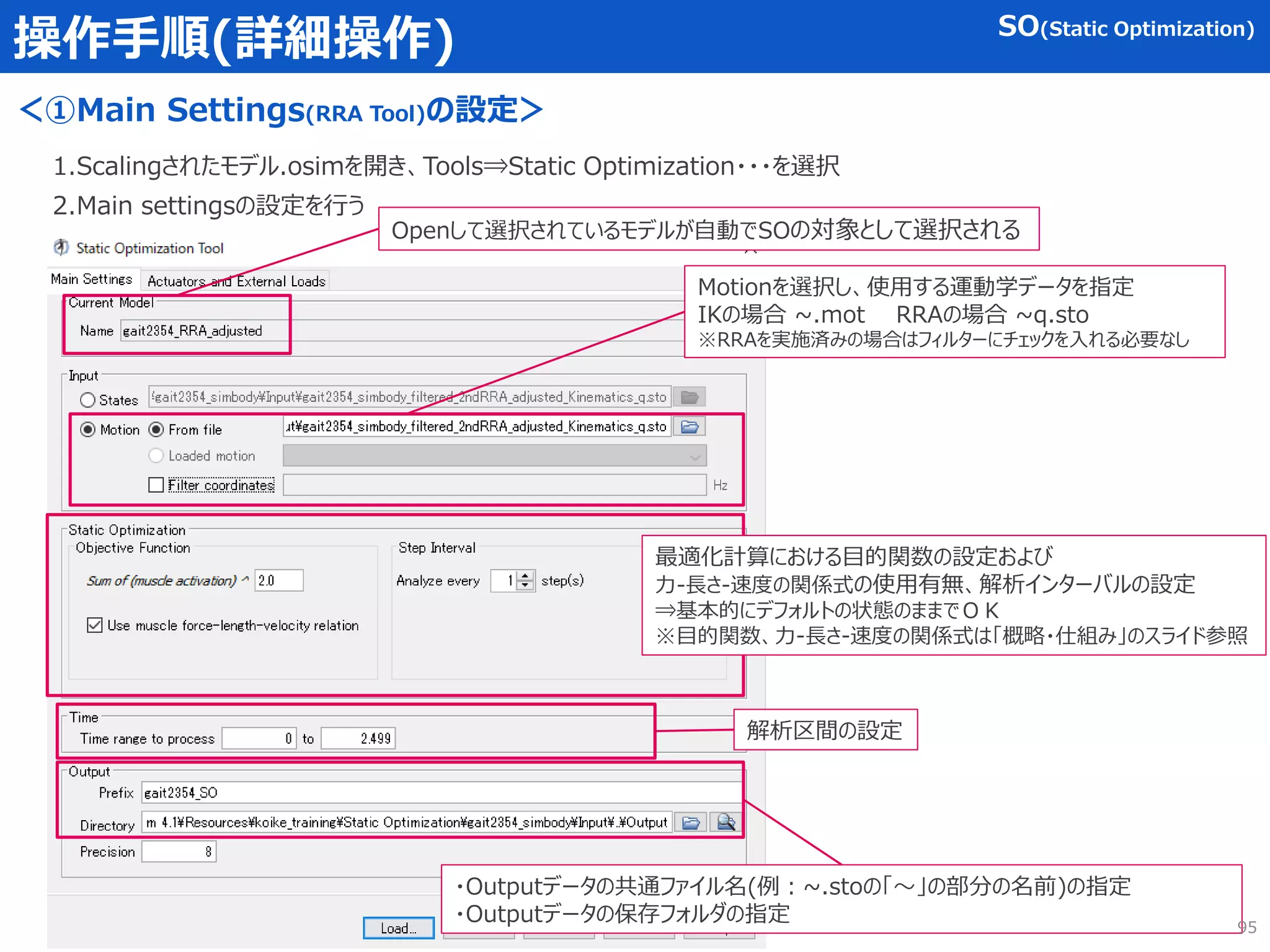
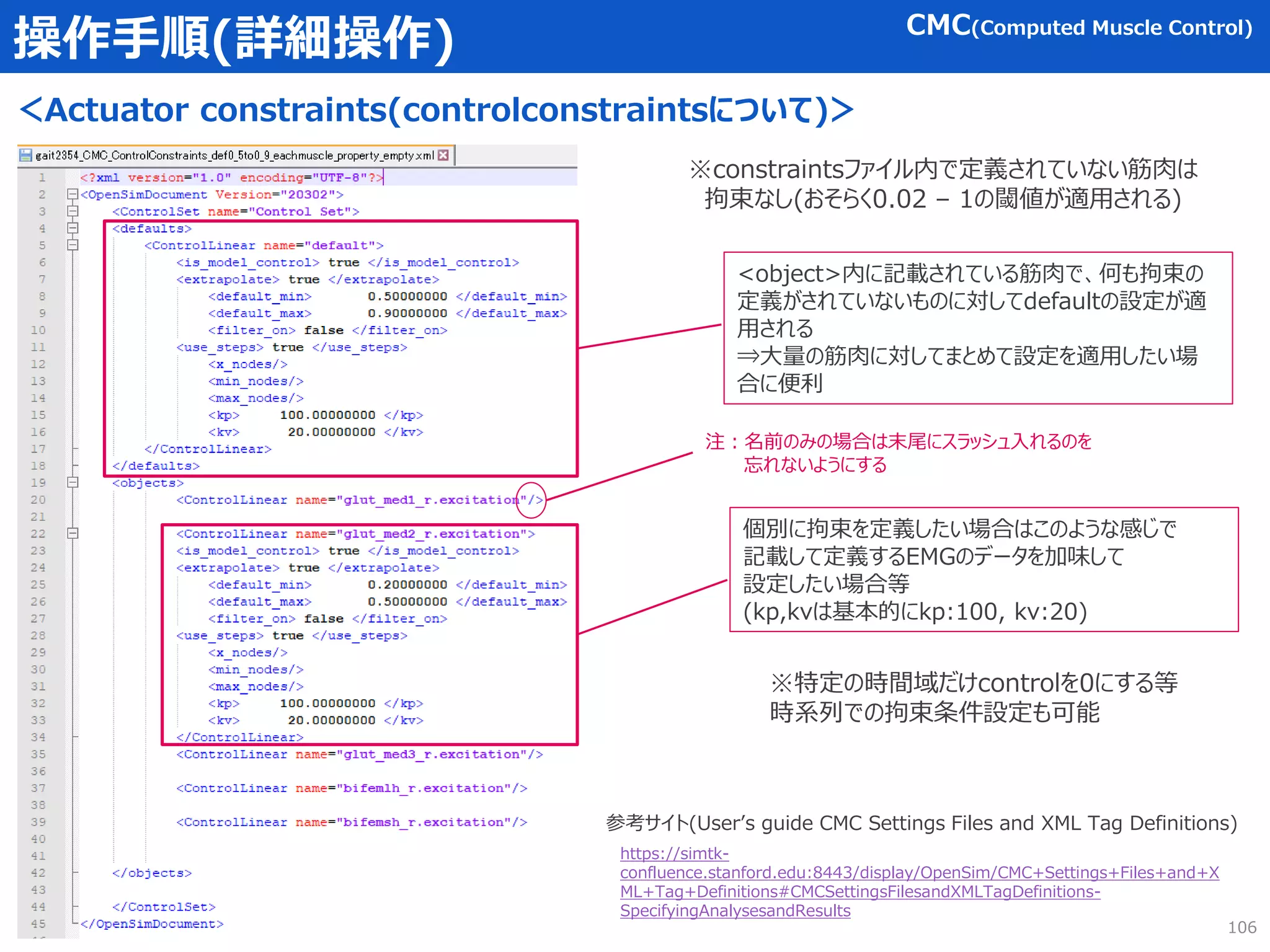
![<actuatorの力と制御値の設定 ※詳細は後述の疑問集参照>
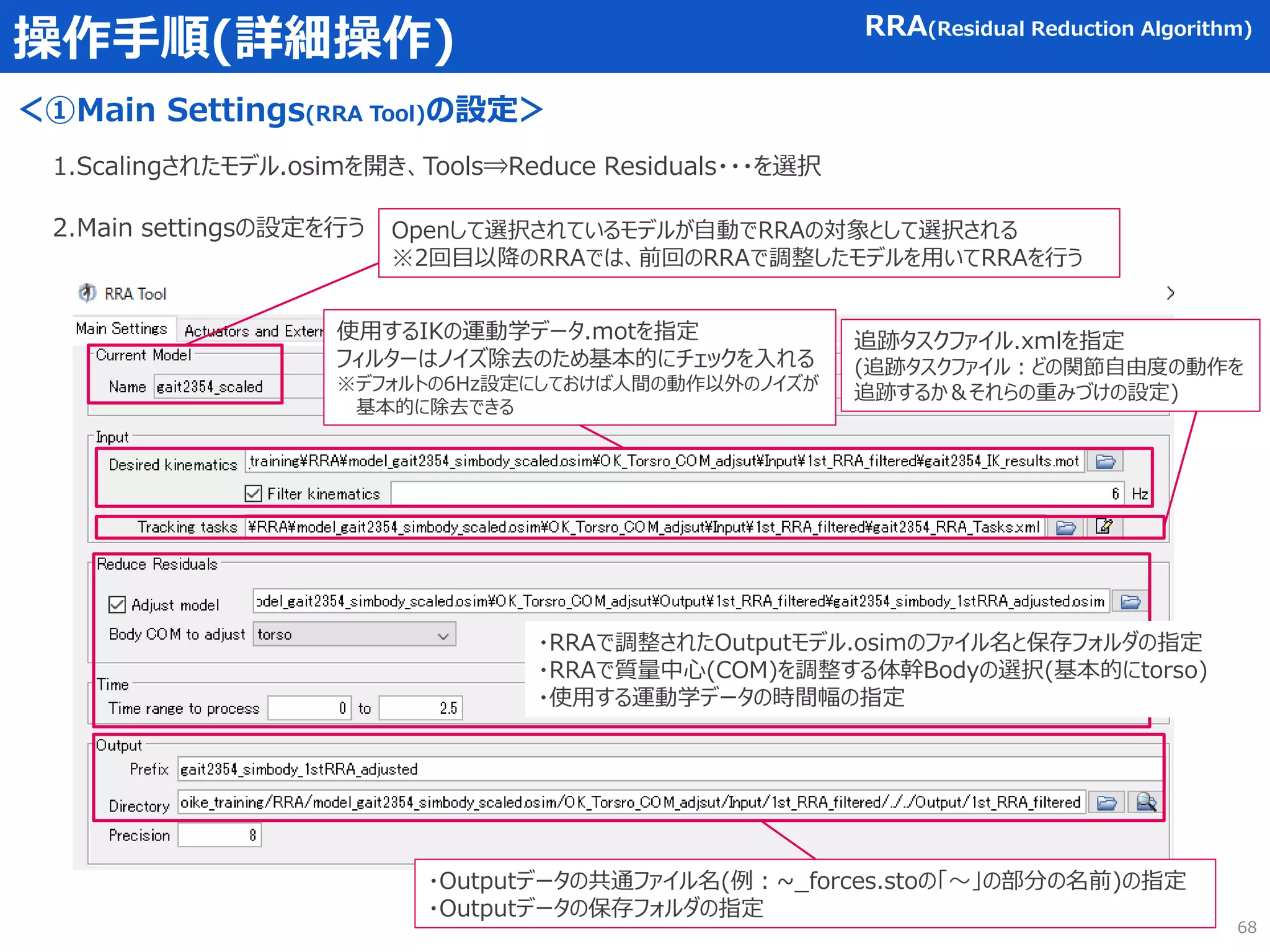
操作手順(詳細操作)
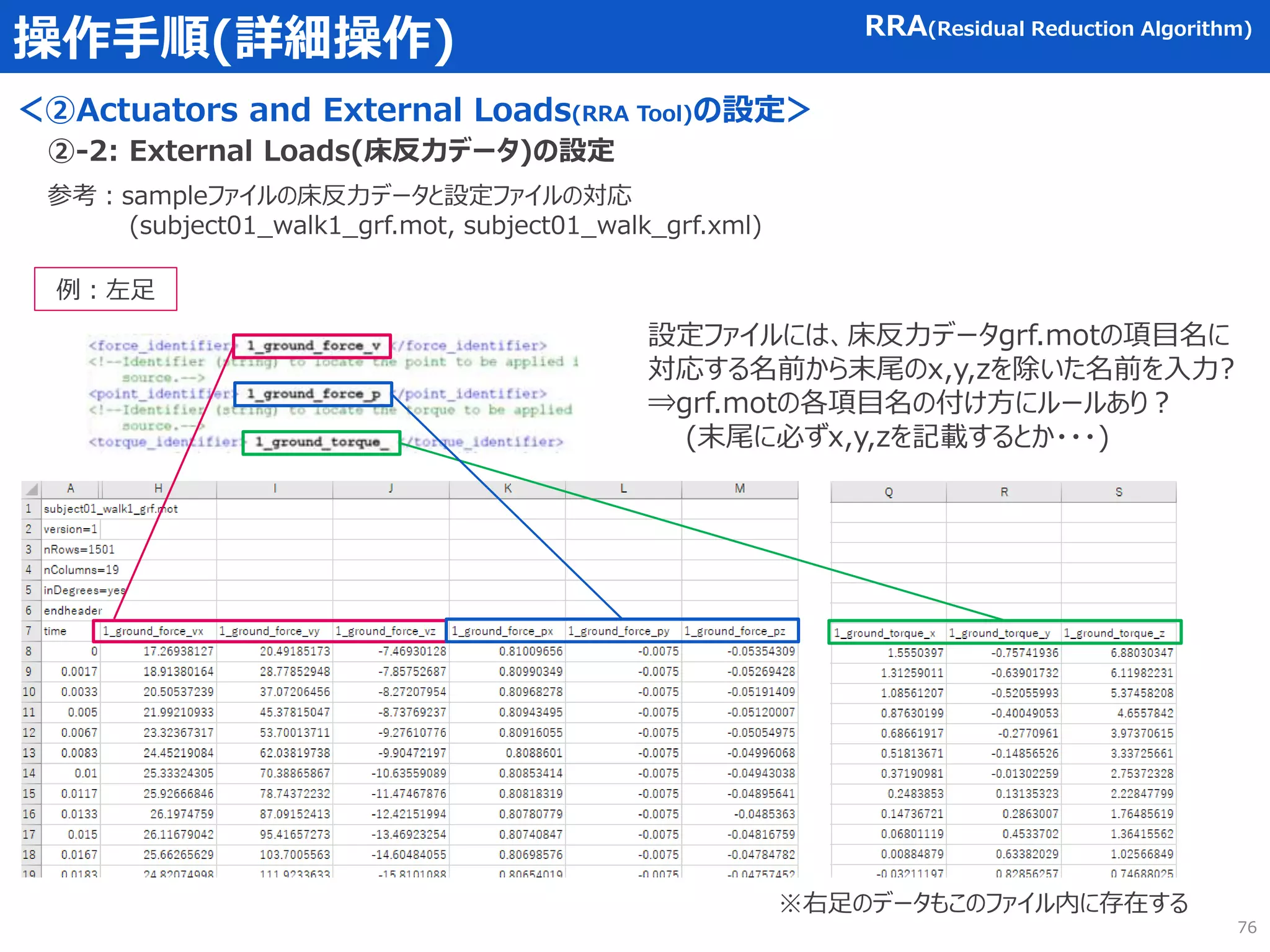
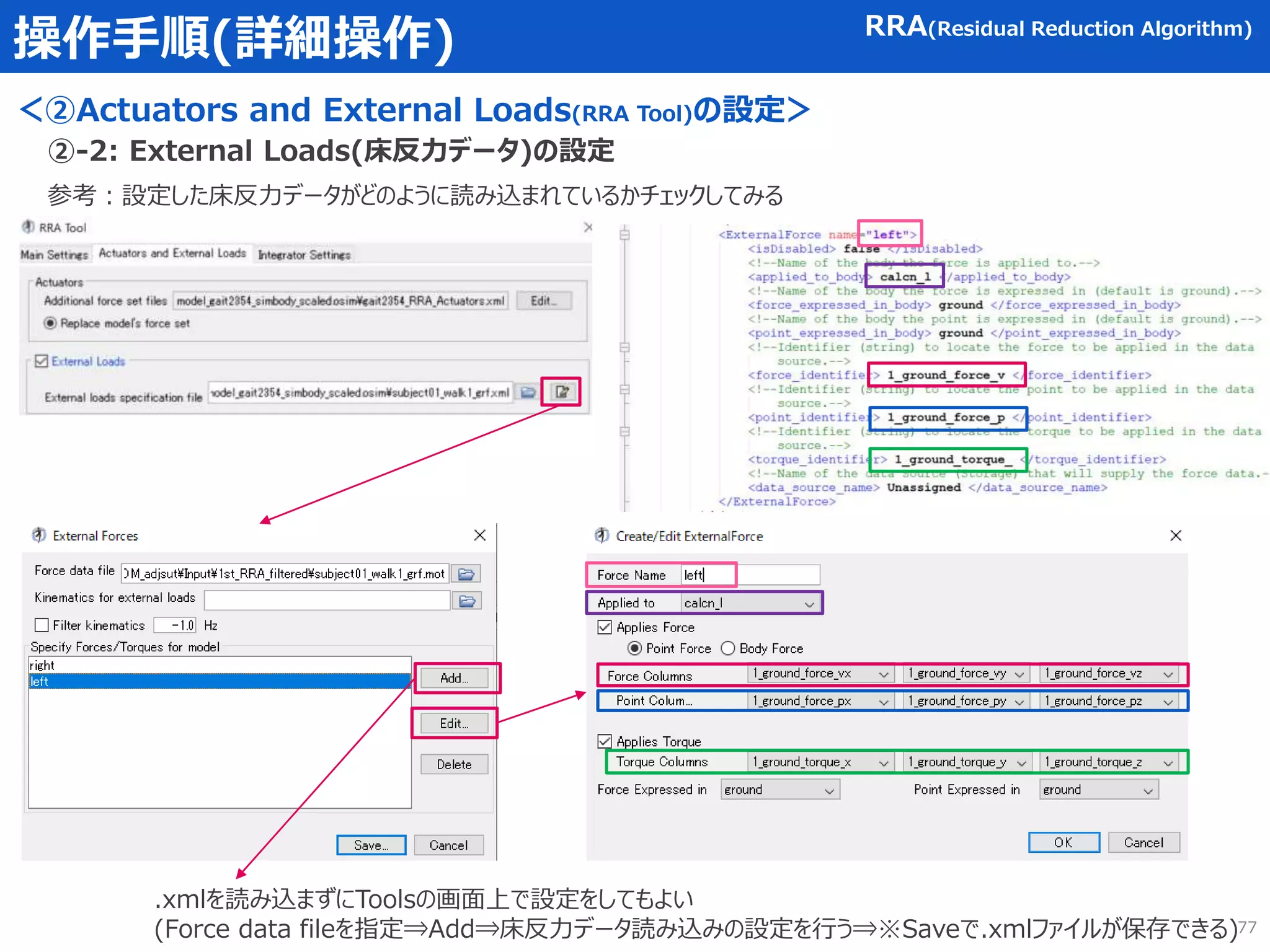
<②Actuators and External Loads(RRA Tool)の設定>
RRA(Residual Reduction Algorithm)
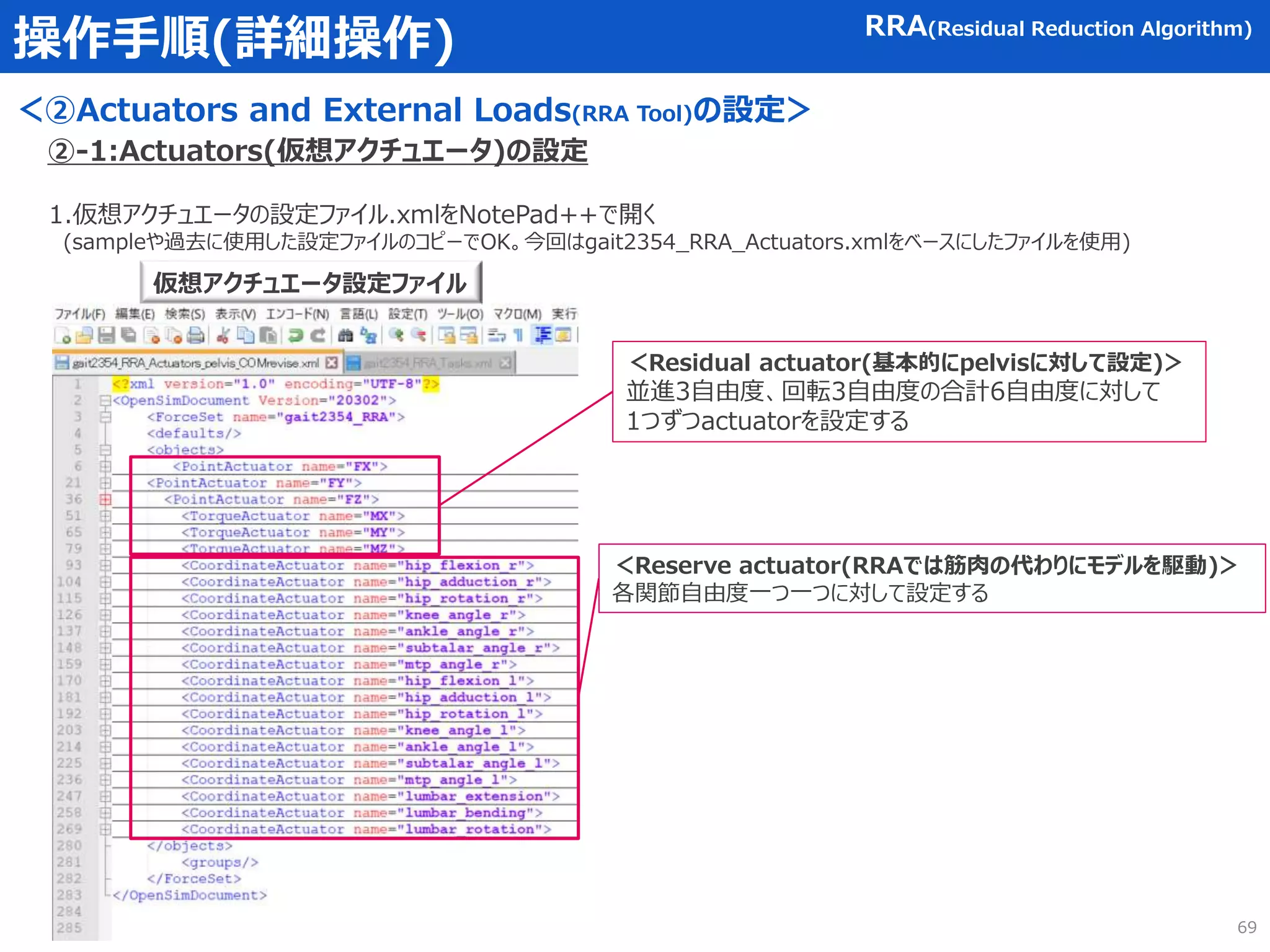
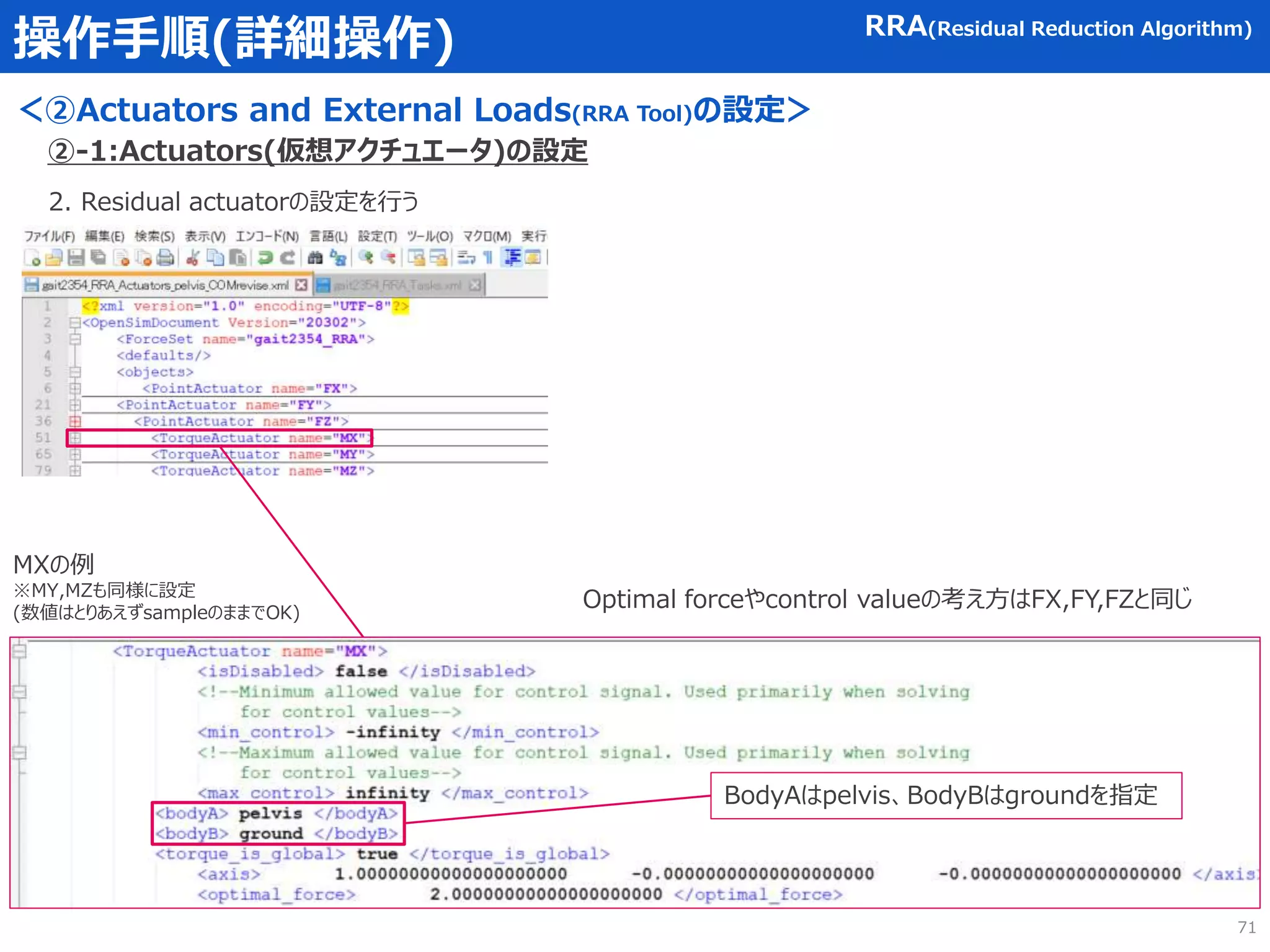
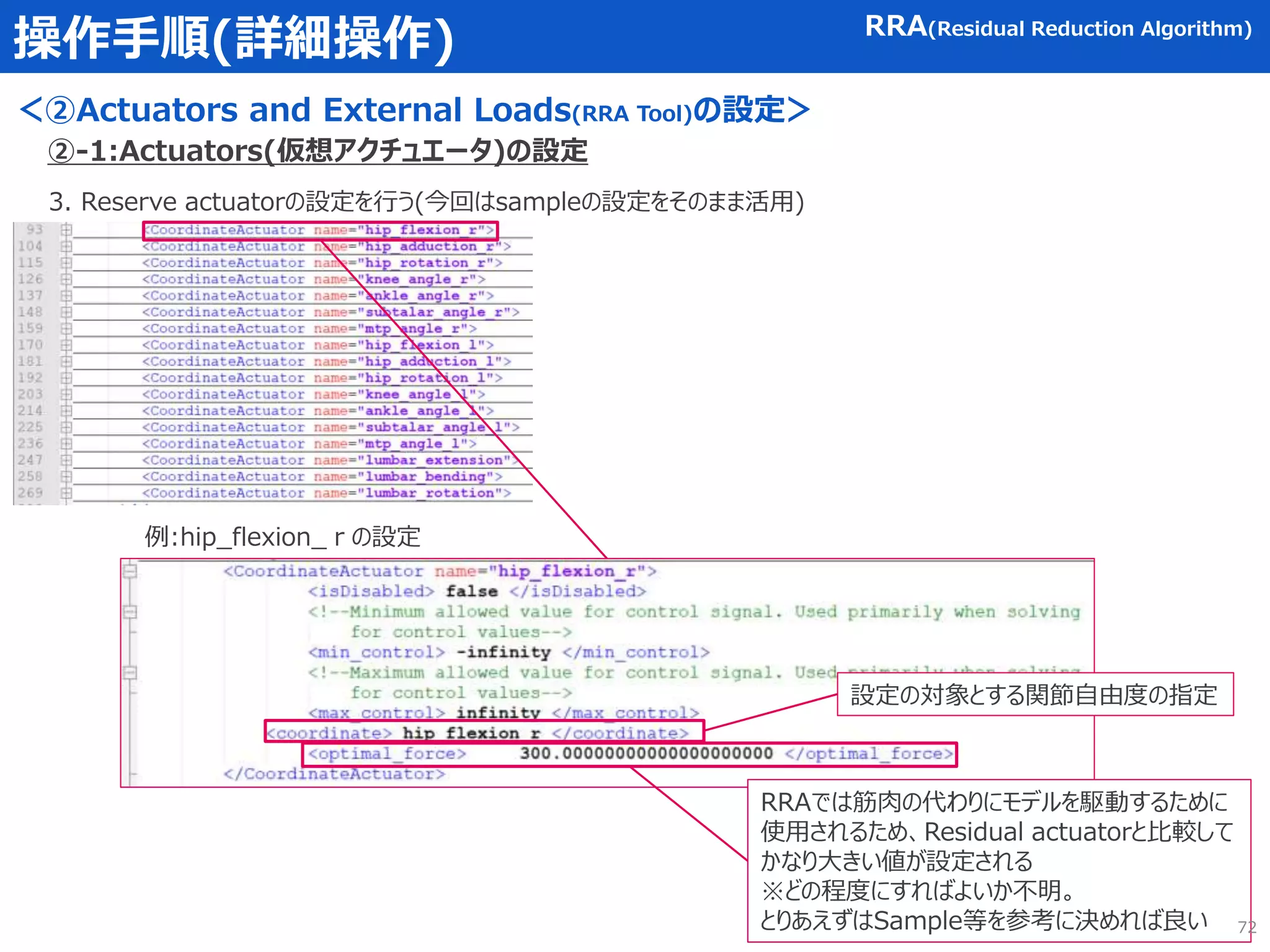
②-1:Actuators(仮想アクチュエータ)の設定
2. Residual actuatorの設定を行う
FXの例
※FY,FZも同様に設定
(数値はとりあえずsampleのままでOK)
= Optimal force × control value
アクチュエータの力
(ここではResidual force)
●RRAの最適化計算では「計算コスト」が最も小さくなるようにモデルの各部の力が計算される
(要するに、最小の労力でモデルを駆動できるように各部の力が最適化される)
⇒したがって、計算コストの小さいアクチュエータから優先的にモデルの駆動に使用される
●Residual forceは、力学的不整合の辻褄を合わせるための、実際には存在しない力である。
⇒最適化計算での使用優先度が低くなる(コストが高くなる)ように、値を設定する必要がある
Optimal force:値が小さいほど計算コスト 大
Control value : 値が大きいほど計算コスト 大
例:[Optimal force 小] × [Control value 大]
⇒筋肉量の少ない人が、筋肉を最大限活性化させて物を持ち上げているイメージ⇒コスト大
[Optimal force 大] × [Control value 小]
⇒筋肉量の多い人が、少ない筋活性度で軽々と物を持ち上げているイメージ⇒コスト小
値を大きく
値を小さく
<body>Residual actuatorを設置body⇒pelvis
<point>pelvisのCOM座標(ScalingしたモデルのCOM)
<direction> 力の作用方向
※point_is_global:false⇒bodyの相対座標系で力の作用点が定義される
force_is_global:true⇒global座標系で力の作用方向が定義される 70](https://image.slidesharecdn.com/opensimmanualbasicrev1-210203094910/75/OpenSIM-1-70-2048.jpg)
![操作手順(詳細操作)
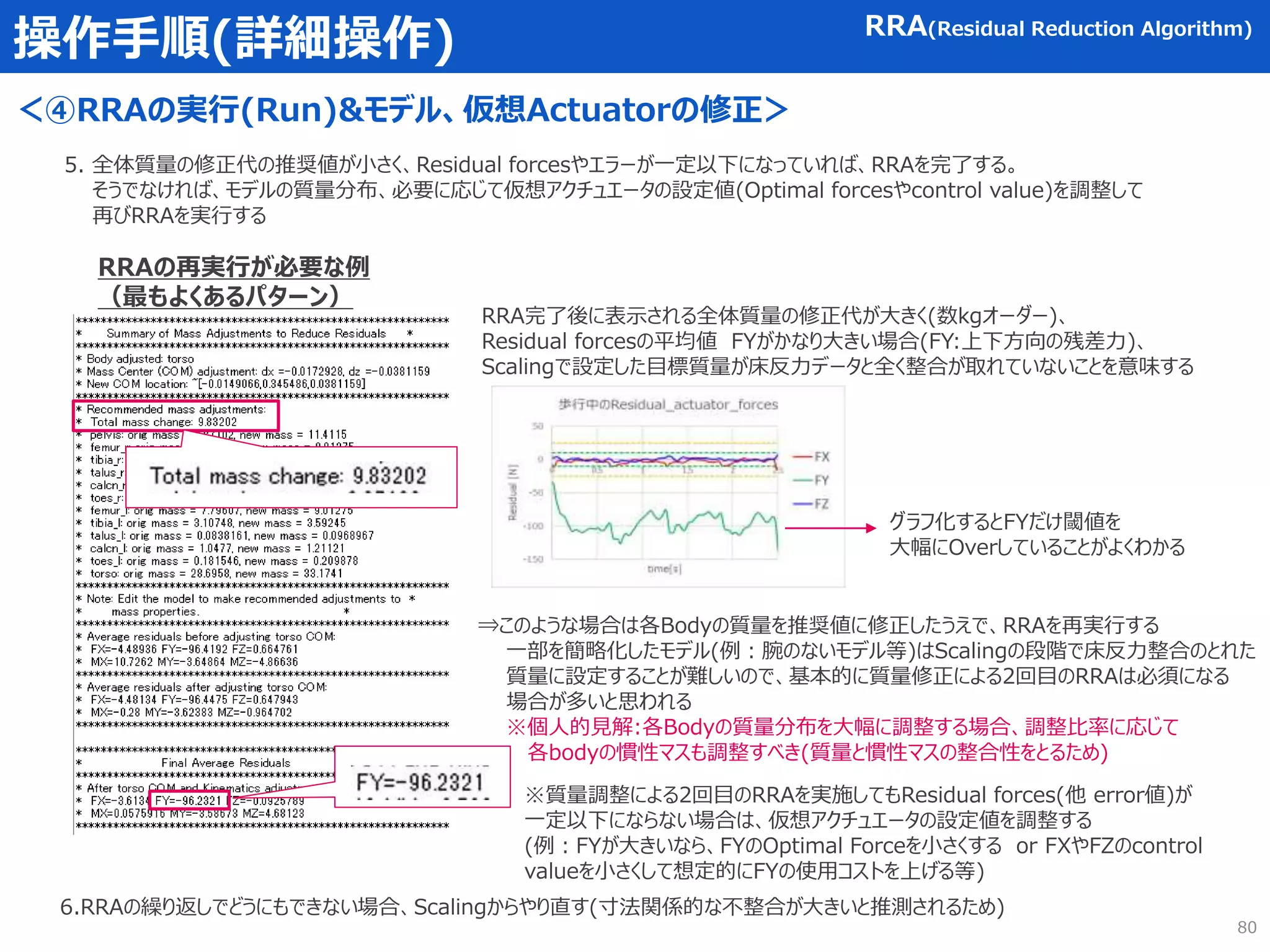
<④RRAの実行(Run)&モデル、仮想Actuatorの修正>
RRA(Residual Reduction Algorithm)
1. 設定完了後⇒設定をSave⇒RunでRRAを実行
2.計算完了後Window右下のMessages Windowを確認する
3. Messages Windowに左記のように、指定したBody(今回はtorso)の質量中心
(COM)の調整結果と質量分布の修正推奨値※、Residual actuatorの力の
時間平均値が表示される
※質量分布の推奨値は、全体質量の修正値に応じて、各Body一律の係数で
修正されると思われる
4.Residual forcesの平均値、MAX値(FX,FY,FZ,MX,MY,MZ)、そのほかエラーの出力値が一定
以下になっているかチェックする(参考閾値はユーザーズガイド参照、Residual forcesのMAX値は
Outputファイルをエクセルでグラフ化するなどして判断する)
https://simtk-
confluence.stanford.edu:8443/display/OpenSim/Getting+Started+with+RRA
Thresholds: Good OK BAD
MAX Residual Force [N] 0-10N 10-25N >25N
RMS Residual Force [N] 0-5N 5-10N >10N
MAX Residual Moment [Nm] 0-50Nm 50-75N >75N
RMS Residual Moment [Nm] 0-30Nm 30-50N >50N
MAX pErr [trans, cm] 0-2cm 2-5cm >5cm
RMS pErr [trans, cm] 0-2cm 2-4cm >4cm
MAX pErr [rot, deg] 0-2deg 2-5deg >5deg
RMS pErr [rot, deg] 0-2deg 2-5deg >5deg
[Ref.2]
<Users guide 参考閾値 [Ref.2]>
79](https://image.slidesharecdn.com/opensimmanualbasicrev1-210203094910/75/OpenSIM-1-79-2048.jpg)
![RRA疑問集
<Q2.仮想アクチュエータの設定値は結局どうすればよいの?>
疑問:計算コストを上げることとResidual forceを小さくすることのどちらを優先してControl valueを決めればよいのか?
そもそもControl valueは、どの程度のオーダに設定すればよいのか?
RRA(Residual Reduction Algorithm)
①Residual actuatorに関して
計算コストを上げるためには
Control valueを大きくする必要がある
Residual forceを小さくするためには
Control valueを小さくする必要がある
= Optimal force × control value
Residual force
●RRAの最適化計算では「計算コスト」が最も小さくなるようにモデルの各部の力が計算される
(要するに、最小の労力でモデルを駆動できるように各部の力が最適化される)
⇒したがって、計算コストの小さいアクチュエータから優先的にモデルの駆動に使用される
●Residual forceは、力学的不整合の辻褄を合わせるための、実際には存在しない力である。
⇒Residual forceの数値を最小化しつつ、最適化計算での使用優先度が低くなる(コストが高くなる)ように、値を設定する必要がある。
Optimal force:値が小さいほど計算コスト 大
Control value : 値が大きいほど計算コスト 大
しかしながら・・・ <Control valueの矛盾が生じる>
例:[Optimal force 小] × [Control value 大]
⇒筋肉量の少ない人が、筋肉を最大限活性化させて物を持ち上げているイメージ⇒コスト大
[Optimal force 大] × [Control value 小]
⇒筋肉量の多い人が、少ない筋活性度で軽々と物を持ち上げているイメージ⇒コスト小
以下に示すように、Control value はResidual forceと計算コストに対して、正反対の影響を及ぼしてしまう
84](https://image.slidesharecdn.com/opensimmanualbasicrev1-210203094910/75/OpenSIM-1-84-2048.jpg)
![概略・仕組み
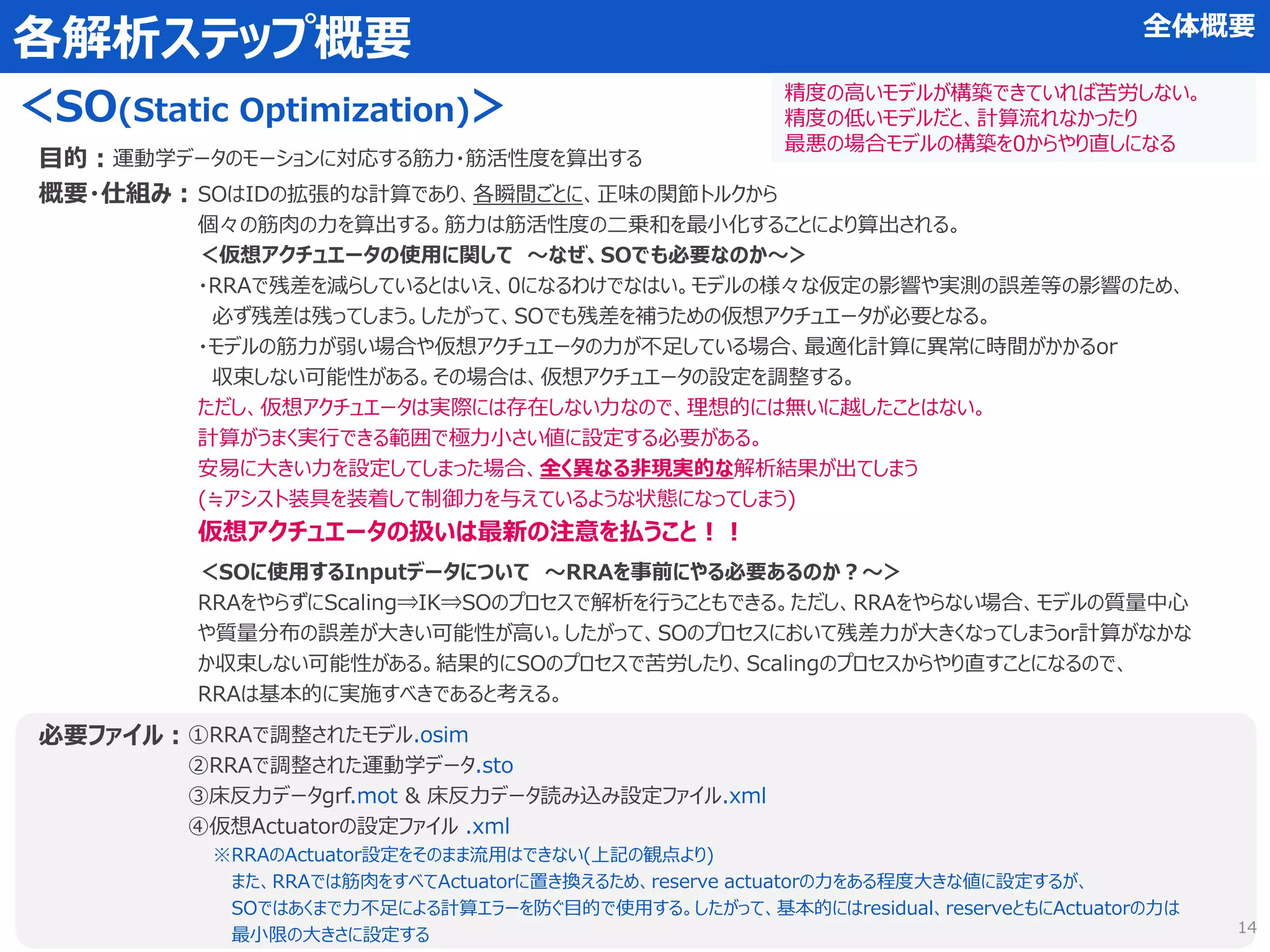
目的:
SOはIDの拡張的な計算であり、各瞬間ごとに、正味の関節トルクから
個々の筋肉の力を算出する。筋力は筋活性度の目的関数の二乗和を最小化することにより算出される。
具体的には、これまでのステップで既知となっているモデルの運動学データ(位置、速度、加速度)を活用し、
各timeステップごとに上記の方程式を解いている
[Ref.3]
[Ref.3]:Users guide https://simtk-confluence.stanford.edu:8443/display/OpenSim/How+Static+Optimization+Works
𝑚=1
𝑛
(𝑎𝑚𝐹
𝑚
0
)𝑟𝑚,𝑗 = 𝜏𝑗
SO(Static Optimization)
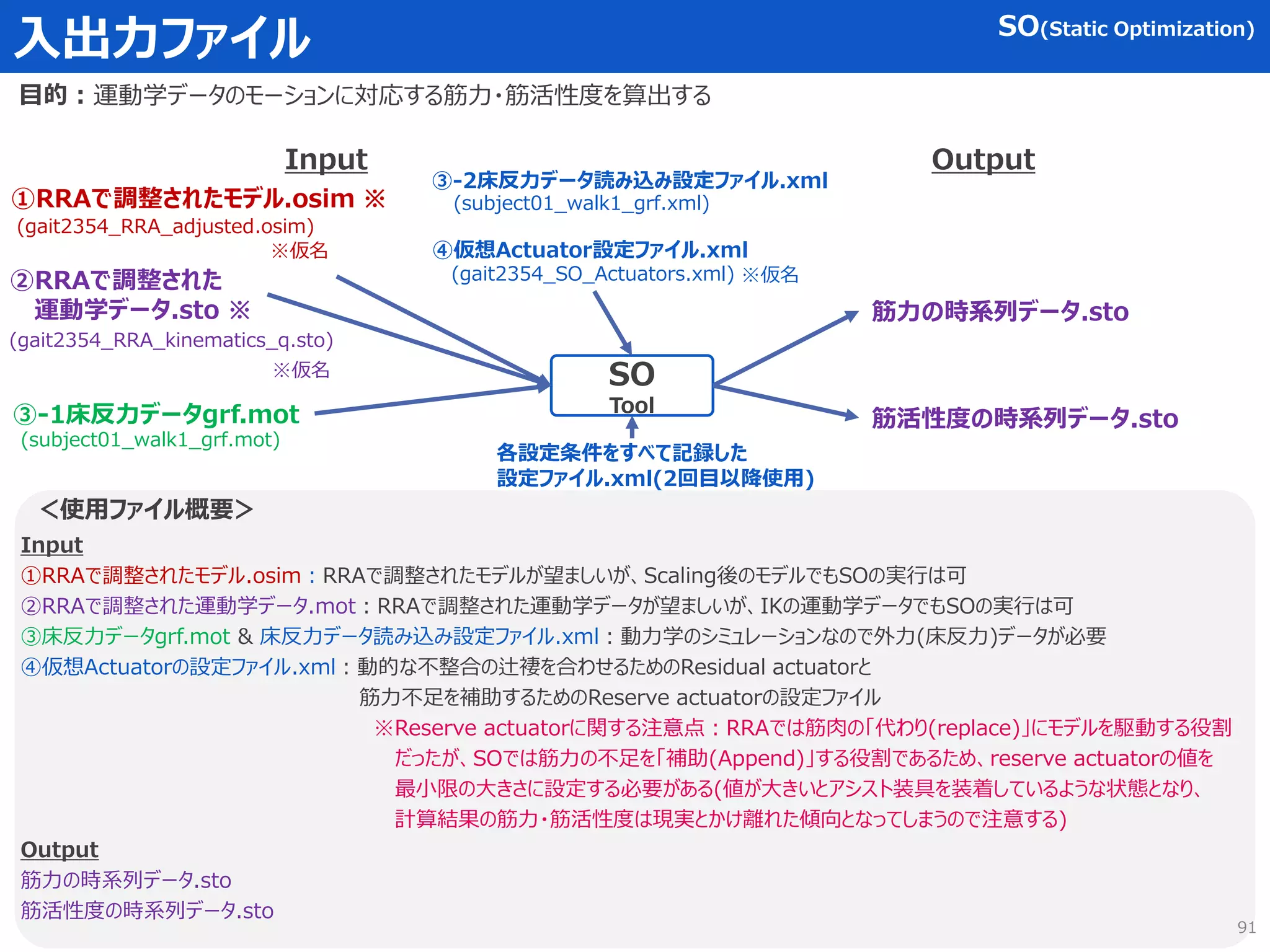
運動学データのモーションに対応する筋力・筋活性度を算出する
𝑚=1
𝑛
[(𝑎𝑚𝑓(𝐹
𝑚
0
, 𝑙𝑚, 𝑣𝑚)]𝑟𝑚,𝑗 = 𝜏𝑗
𝐽 =
𝑚=1
𝑛
(𝑎𝑚)𝑃
目的関数
力-長さ-速度の関係式
力の生成式 n :筋肉の数
m :各部の筋肉
P :ユーザの定める任意定数
: 各timeステップごとの筋肉mの活性度レベル
: 筋肉mの最大力(等尺性:isometric)
: 関節軸jに関する筋肉mのモーメントアーム
: 関節軸jに作用する一般化された力
: 筋肉mの長さ
: 筋肉mの収縮速度
: 筋肉mの力-長さ-速度平面
92](https://image.slidesharecdn.com/opensimmanualbasicrev1-210203094910/75/OpenSIM-1-92-2048.jpg)
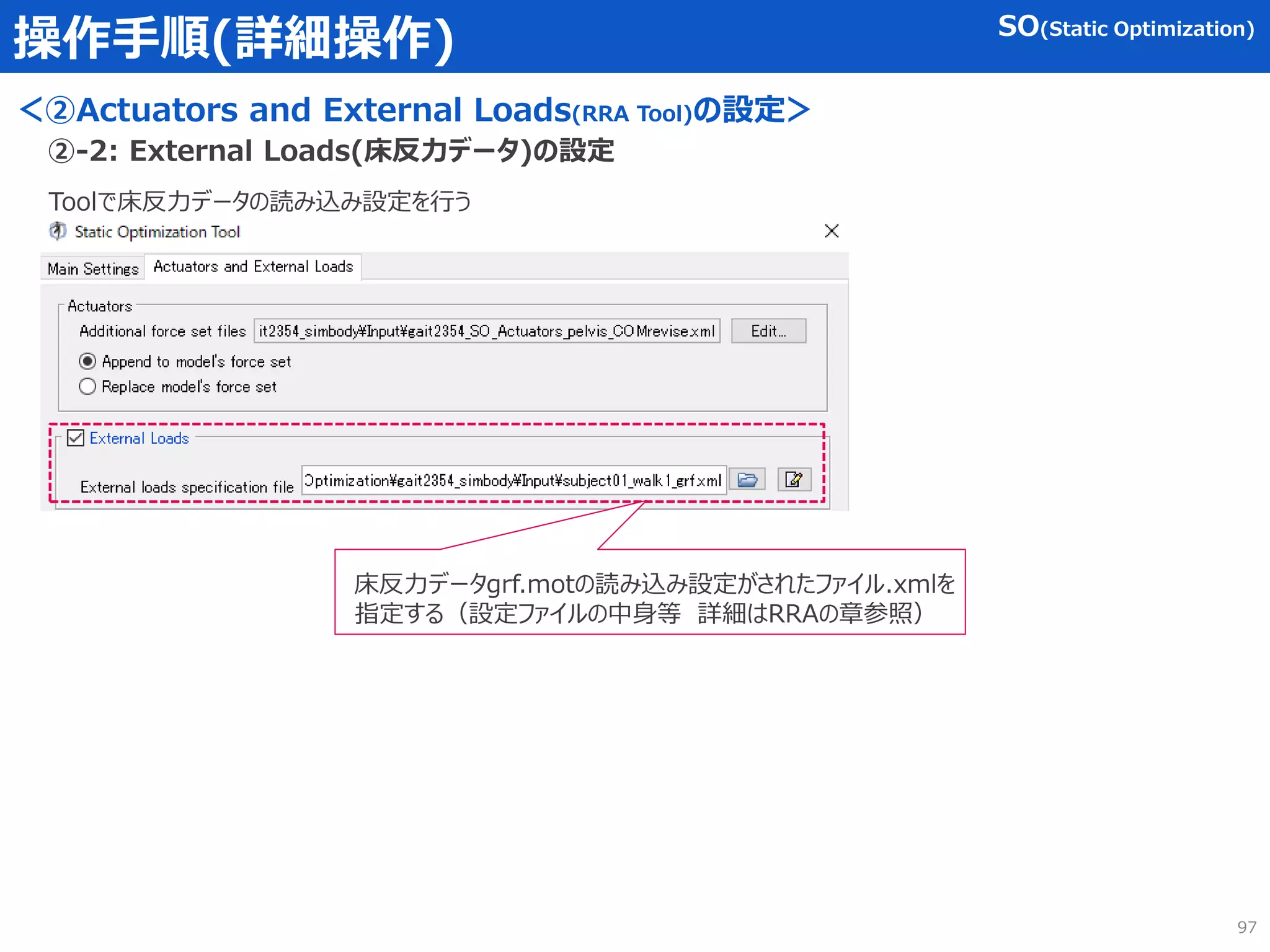
![操作手順(詳細操作)
<②Actuators and External Loads(RRA Tool)の設定>
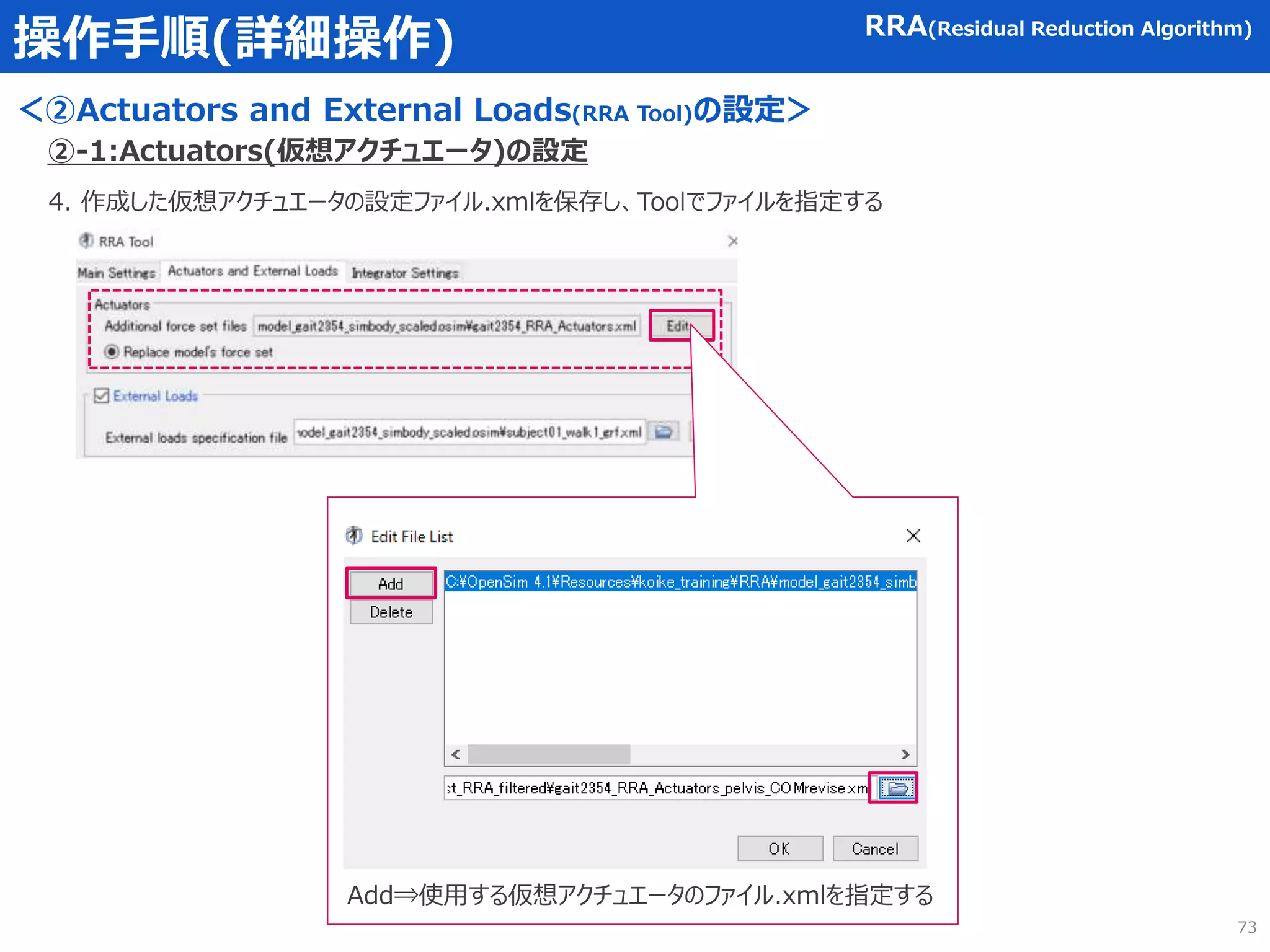
作成した仮想アクチュエータの設定ファイル.xmlを保存し、Toolでファイルを指定する
②-1:Actuators(仮想アクチュエータ)の設定
Add⇒使用する仮想アクチュエータのファイル.xmlを指定する
SO(Static Optimization)
注:RRAと異なり、SOは筋肉の置き換えではなく
筋肉の補助(計算が収束するように)の役割なので
[Append]を選択する
96](https://image.slidesharecdn.com/opensimmanualbasicrev1-210203094910/75/OpenSIM-1-96-2048.jpg)
![操作手順(詳細操作)
<③SOの実行(Run)&仮想Actuatorの修正>
SO(Static Optimization)
1. RUNで計算実行⇒計算がうまく進んでいるか確認する
●エラー例:仮想Actuatorの力が弱すぎた場合(or 仮想Actuatorをそもそも設定していなかった場合)
Messageウィンドウに計算失敗のメッセージが表示される
右下の解析進行%表示も全然進まない
2. 計算が失敗した場合は仮想アクチュエータの設定値を調整して、再度SOを実行する
(例えばResidual ForceのOptimal Forceの値を変える ※数[N]レベルの調整)
また。計算がうまく流れていても、仮想アクチュエータの数値が十分に小さくない場合は
アクチュエータの数値を調整し、最小限の補助力で計算が流れるようにする
(理想:ほぼ100%筋肉の力のみでモデルが駆動できている状態)
※仮想アクチュエータの制御概念はRRAのセクション参照 98](https://image.slidesharecdn.com/opensimmanualbasicrev1-210203094910/75/OpenSIM-1-98-2048.jpg)
![+
-
+
-
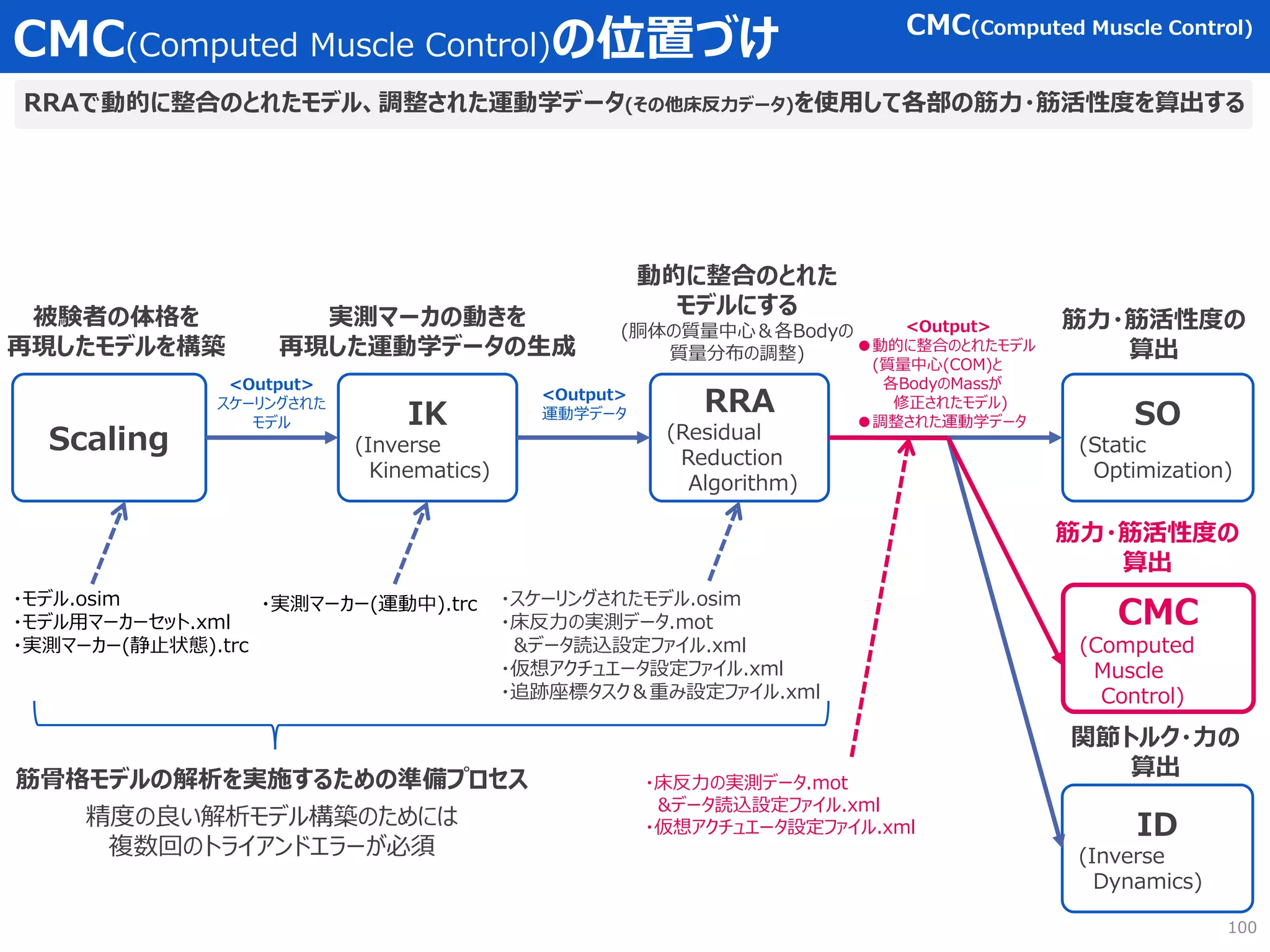
概略・仕組み
目的:
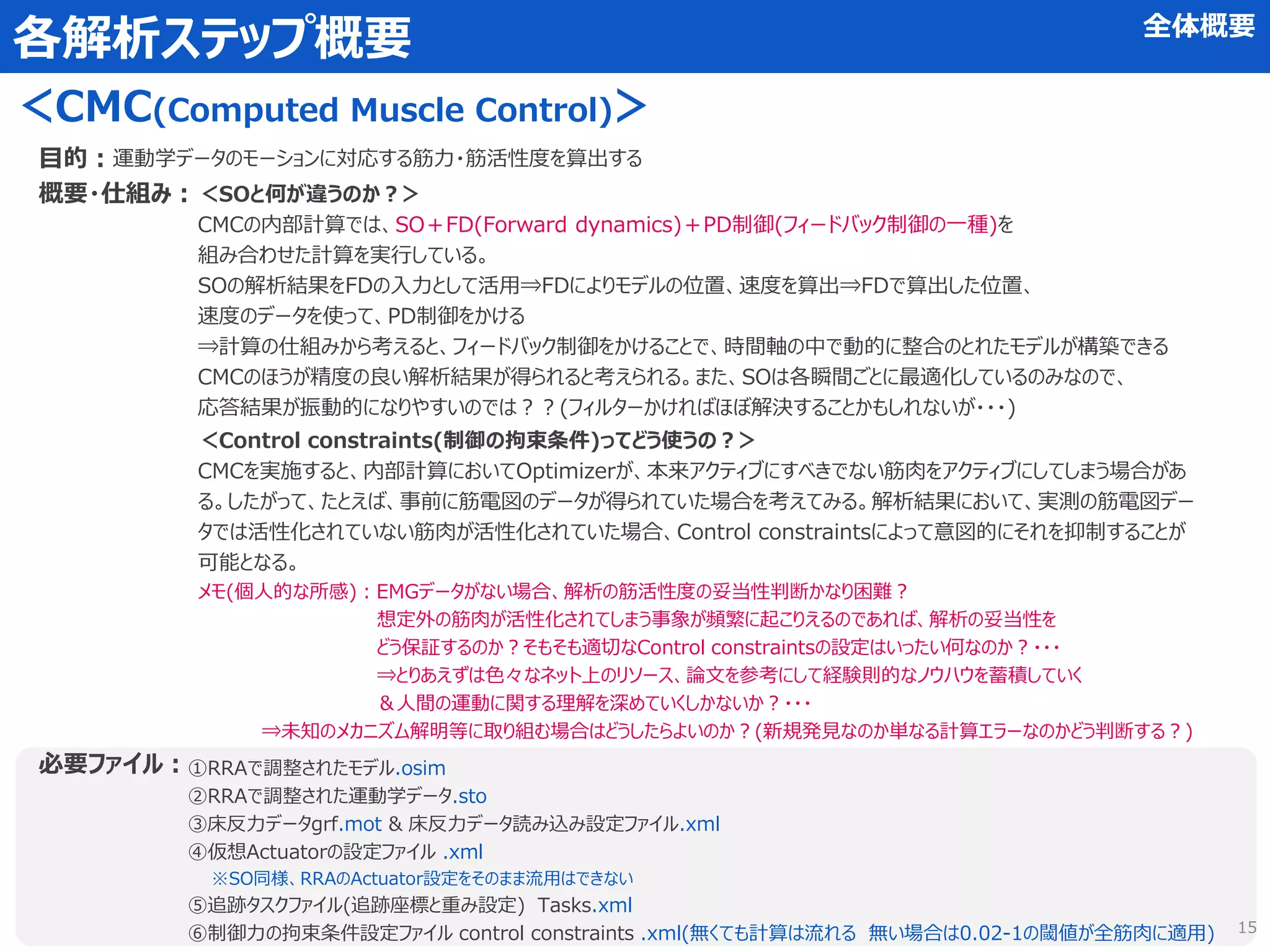
CMCの内部計算では、SO+FD(Forward dynamics)+PD制御(フィードバック制御の一種)を
組み合わせた計算を実行している。
[Ref.4, 5]
[Ref.4]:Users guide https://simtk-confluence.stanford.edu:8443/display/OpenSim/How+CMC+Works
[Ref.5]:Thelen, D.G. and Anderson, F.C., "Using computed muscle control to generate forward dynamic simulations of human walking from experimental data, J. Biomech., 2006, 39(6):1107-1115
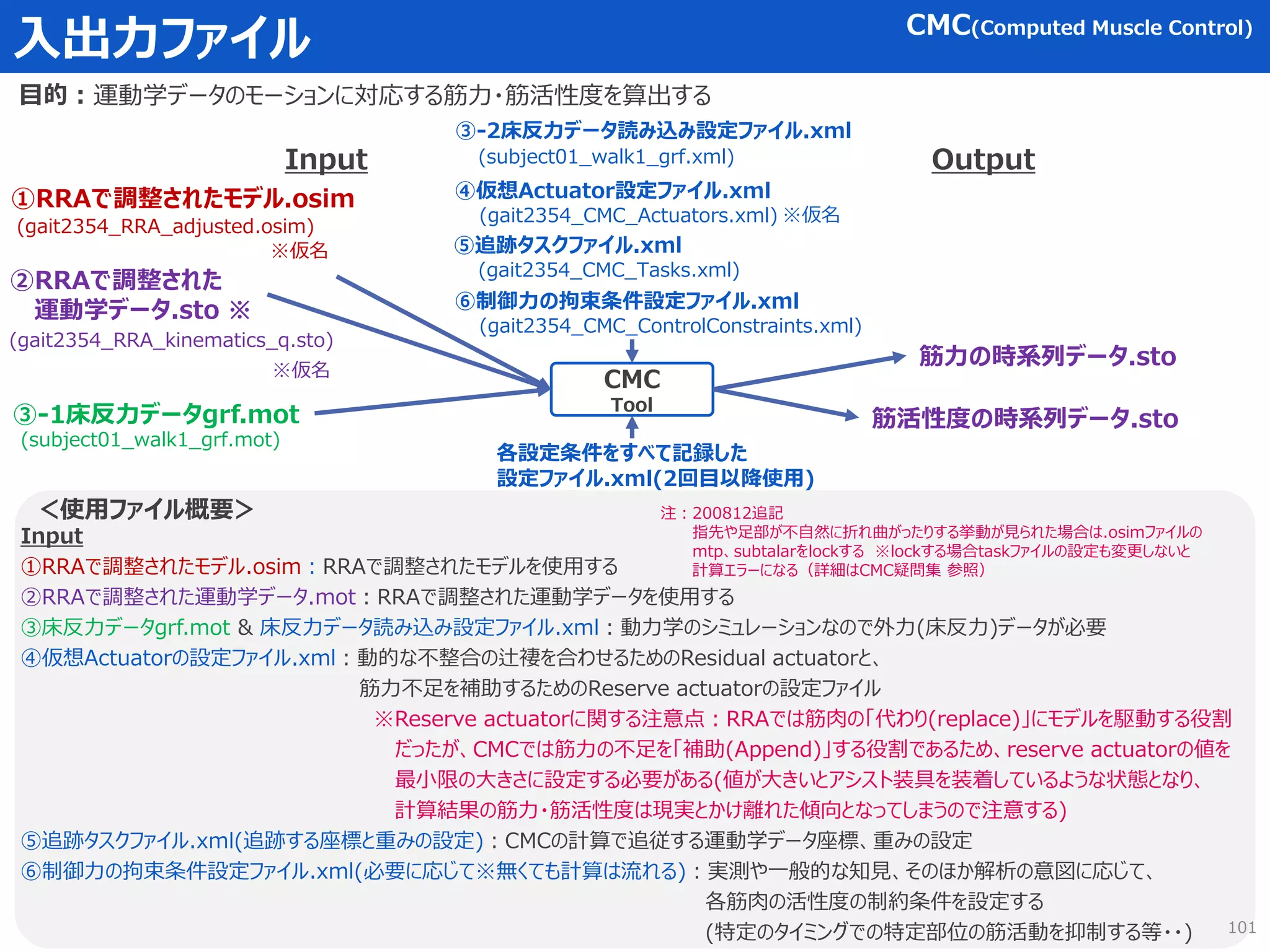
運動学データのモーションに対応する筋力・筋活性度を算出する
CMC(Computed Muscle Control)
SO
(Static
Optimization)
FD
(Forward
Dynamics)
𝑥
𝑞
𝑞
𝑞𝑒𝑥𝑝
𝑞𝑒𝑥𝑝
𝑞𝑒𝑥𝑝
𝑓𝑔𝑟𝑓
𝑒𝑥𝑝
𝑞𝑑𝑒𝑠𝑖𝑟𝑒
(𝑡 + 𝑇)
+
+
+
𝑘𝑝
𝑘𝑣
,
, :Inputされた運動学データ
:FDで計算された運動学データ
:目標加速度
:床反力データ
,
𝑘𝑝 𝑘𝑣 :制御ゲイン
CMCの計算概略図
1st : 目標加速度 𝑞𝑑𝑒𝑠𝑖𝑟𝑒
(𝑡 + 𝑇) が計算される
Before CMC: 初期状態が計算される
2nd : 目標加速度を追従するための筋力・筋活性度がSOにより計算される
𝑞𝑑𝑒𝑠𝑖𝑟𝑒
𝑡 + 𝑇 = 𝑞𝑒𝑥𝑝
𝑡 + 𝑇 + 𝑘𝑣[𝑞𝑒𝑥𝑝
𝑡 − 𝑞(𝑡)]+𝑘𝑝[𝑞𝑒𝑥𝑝
𝑡 − 𝑞(𝑡)]
P制御
D制御
フィードバック制御
3rd : SOで計算された筋力・筋活性度を使って、FDにより𝑞、 𝑞が計算される
各ステップで
実行される
102](https://image.slidesharecdn.com/opensimmanualbasicrev1-210203094910/75/OpenSIM-1-102-2048.jpg)




















![SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]画像を使ったSim2Realの現況](https://cdn.slidesharecdn.com/ss_thumbnails/imagesim2real-201030025320-thumbnail.jpg?width=640&height=640&fit=bounds)







