More Related Content
![[DL Hacks]FPGA入門](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacksfpgabeginner-180627050145-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF

PDF

PPTX

PPTX

PDF

PPTX

PDF

PDF
ACRi_webinar_20220118_miyo Similar to 動き検出勉強会リメイク。過去の発表のリメイク版です。動き検出のアルゴリズムとOpencvのオプションについてまとめました

PPTX
研究者のための Python による FPGA 入門 
PDF

PPTX
Fpga programming introduction 
PDF
Halide, Darkroom - 並列化のためのソフトウェア・研究 
PPTX

PDF
2017年のFPGA Community活動について 
PPTX

PDF

PPTX
HPCで使えそうなFPGA搭載AWS F1 インスタンス_20161218 
PPTX
Abstracts of FPGA2017 papers (Temporary Version) 
PDF

PDF
re:Invent 2017 で FPGA に入門してみた 
PPT

PDF
Fpga online seminar by fixstars (1st) 
PDF

PDF
FPGAを用いた世界最速のソーティングハードウェアの実現に向けた試み 
PDF

PDF

PDF

PDF
Recently uploaded

PDF
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研 
PDF
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】 
PDF
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境 
PDF
krsk_aws_re-growth_aws_devops_agent_20251211 
PDF
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ... 
PPTX
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx 動き検出勉強会リメイク。過去の発表のリメイク版です。動き検出のアルゴリズムとOpencvのオプションについてまとめました
- 1.
- 2.
- 3.
- 4.
4
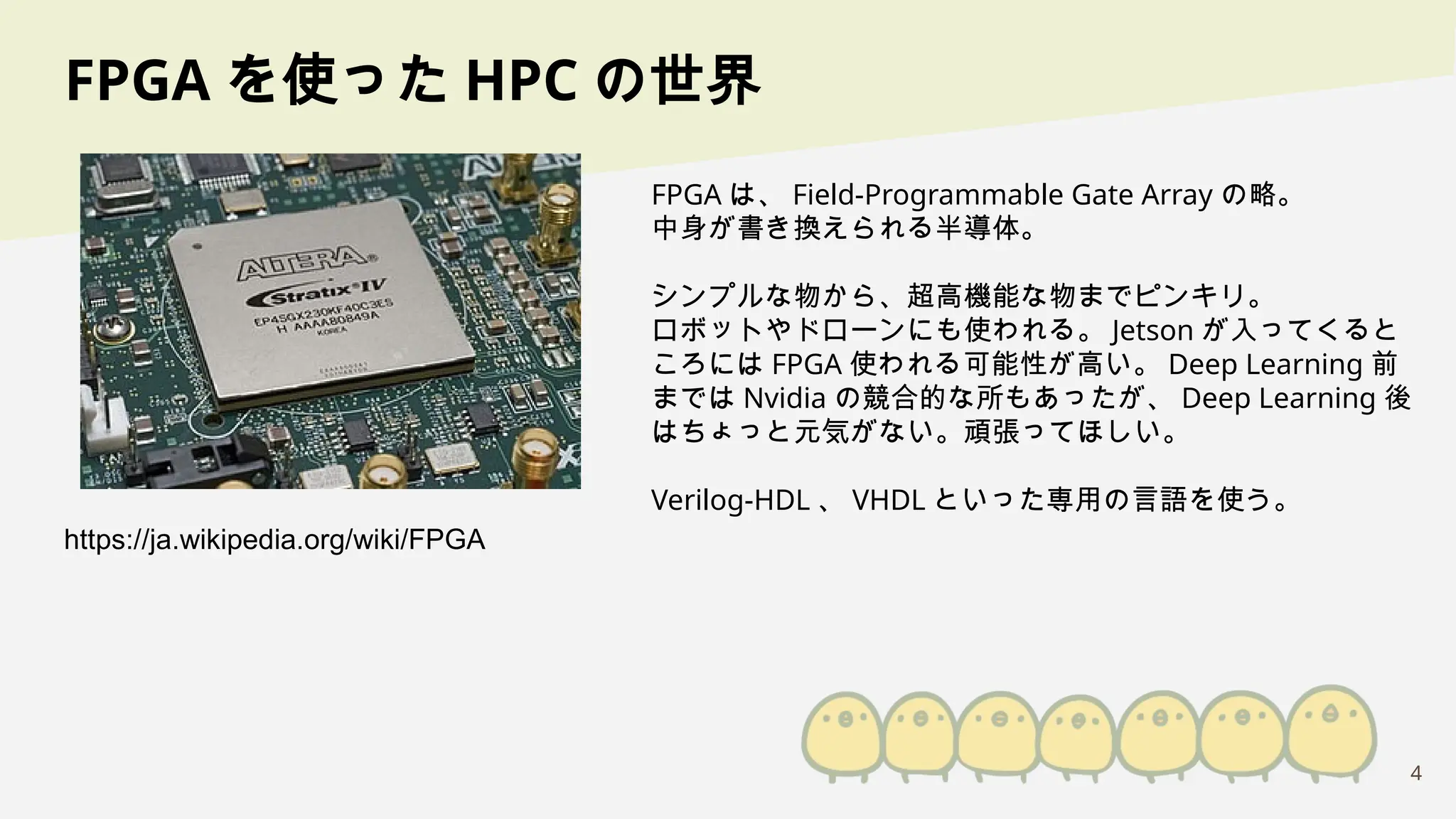
FPGA を使った HPCの世界
FPGA は、 Field-Programmable Gate Array の略。
中身が書き換えられる半導体。
シンプルな物から、超高機能な物までピンキリ。
ロボットやドローンにも使われる。 Jetson が入ってくると
ころには FPGA 使われる可能性が高い。 Deep Learning 前
までは Nvidia の競合的な所もあったが、 Deep Learning 後
はちょっと元気がない。頑張ってほしい。
Verilog-HDL 、 VHDL といった専用の言語を使う。
https://ja.wikipedia.org/wiki/FPGA
- 5.
5
ソフトウェアと FPGA の比較
メリットデメリット
速い
・システムが高価
・消費電力
・物理的な大きさ
・開発に時間がかかる
・デバッグがやりにくい
・データの移動が面倒
・開発環境が有料
・正しく使わないと壊れる
・壊れたときのリカバリが高価
- 6.
6
FPGA の使いどころ
基本的にはニッチなところで使う。
今だと GPUが使えないところが一つのターゲットだと思う。
↓ 発表当時はこんなことを書いています。
FPGA で専用ハードウェアを作るのであれば、対パソコン比で 1000 倍はほしい。
・ 10 倍程度はアルゴリズムですぐ追いつかれる
・ 10 程度は何もしなくても早くなる
・ CPU
・メモリ
・コンパイラ
・ライブラリ
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
12
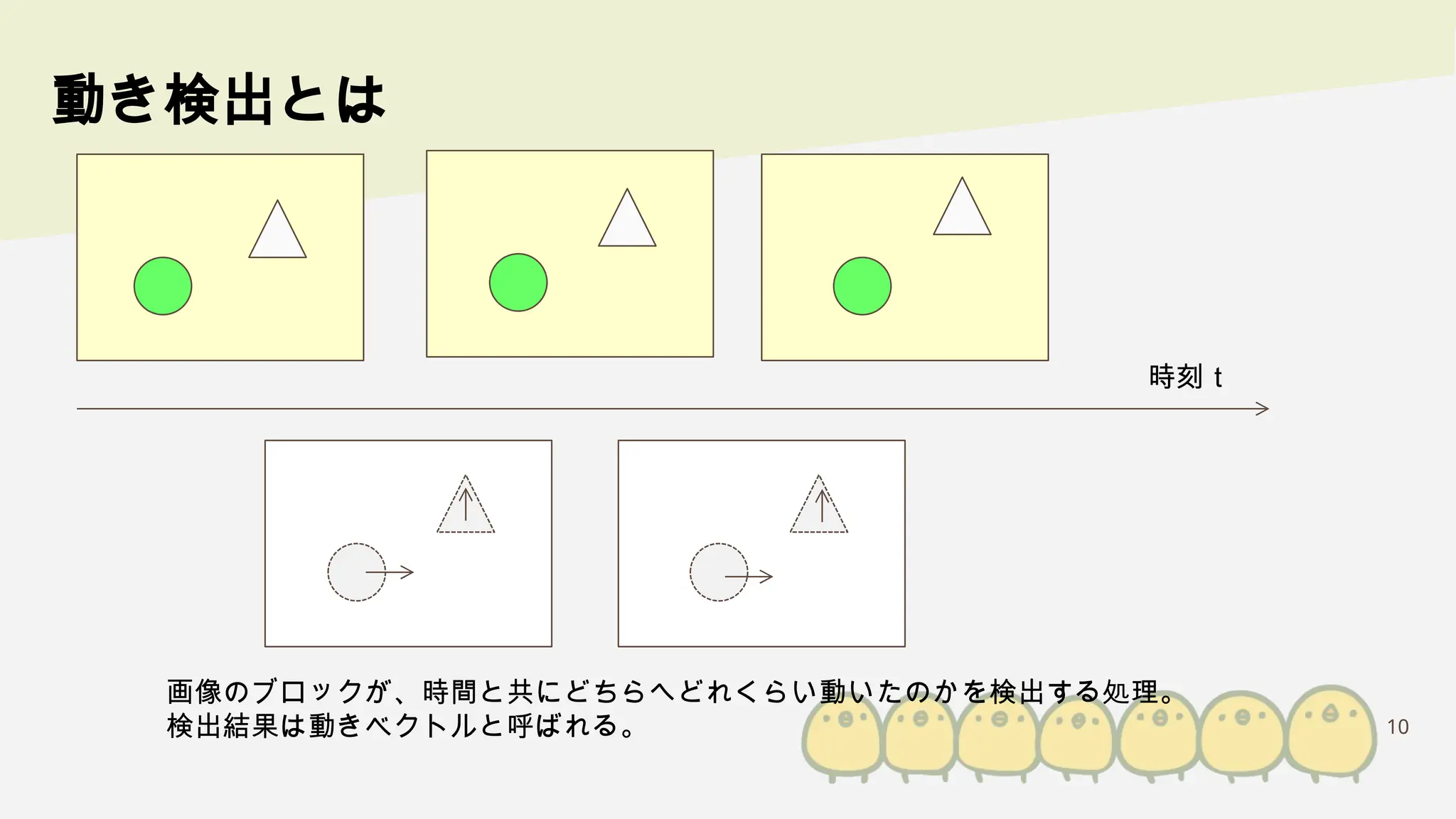
動き検出の評価関数
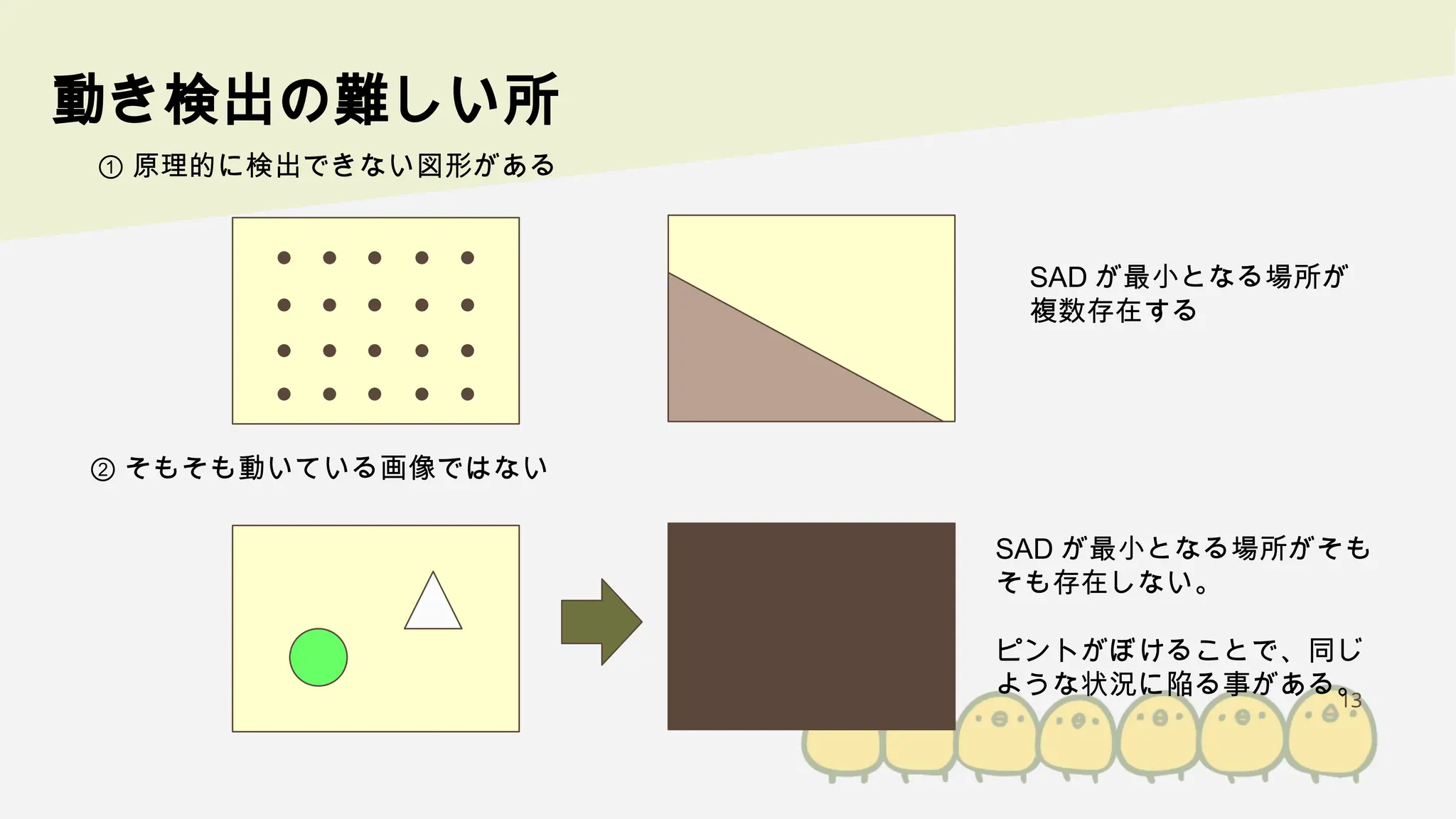
評価関数として SAD 、SSD が使われる。どちらも 0 なら画像は完全に一致している。
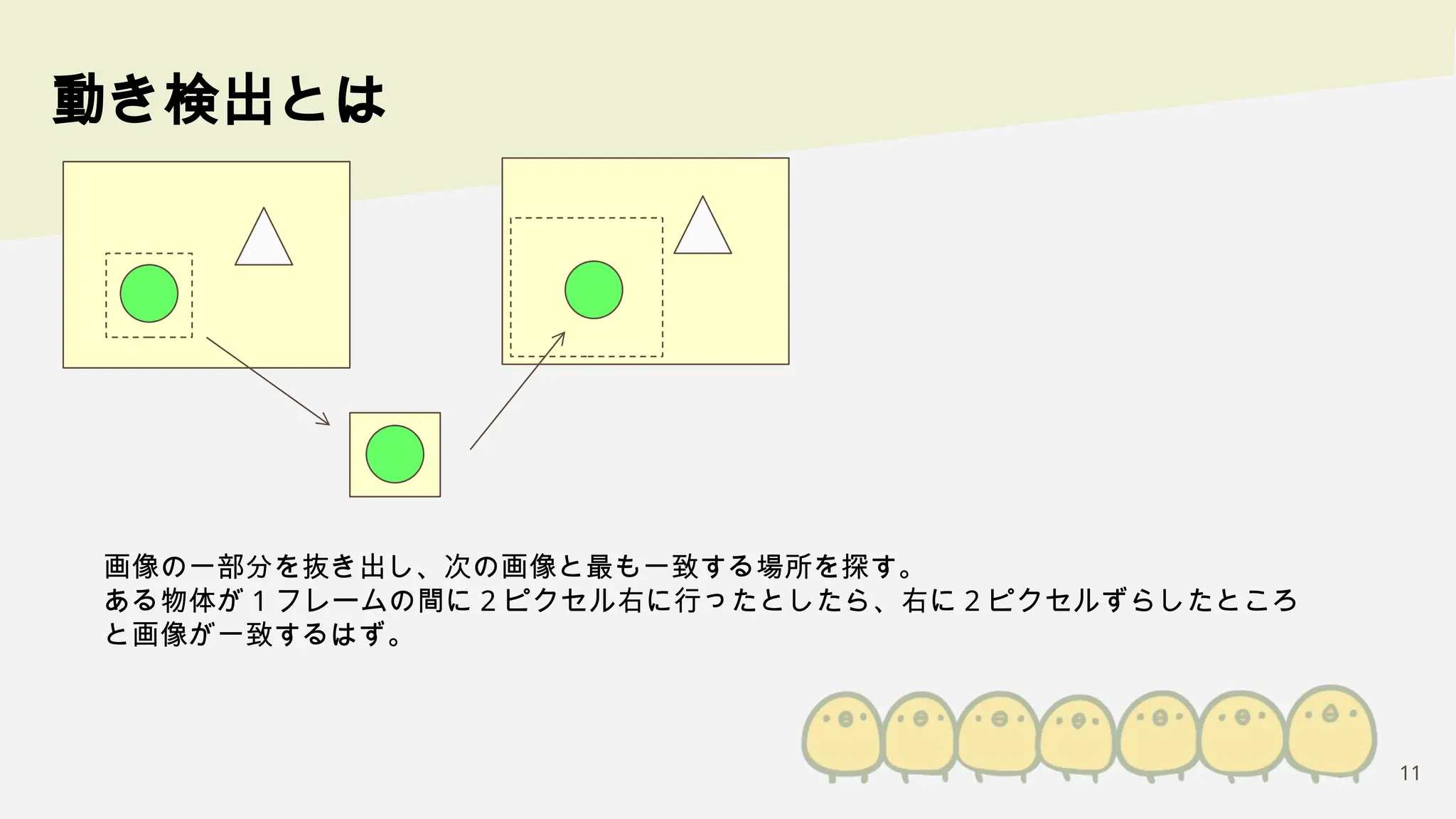
画像の一部を重ねた状態で、画素の差分を取る。
SAD(Sum of Absolute Difference ):各画素の差分の絶対値の和。
SSD(Sum of Squared Difference ):各画素の差分の二乗和
動き検出という点ではあまり精度に差がないこと、計算量が少ないことより SAD が使われる
ことが多い。統計学的には SSD の方が最小二乗和を求めているので SSD が好まれるときもあ
る。
E(𝑤)=
1
2
∑‖𝑑𝑛 − 𝑦(𝑥)‖
2
Deep learning の誤差関数
と同じ
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
23
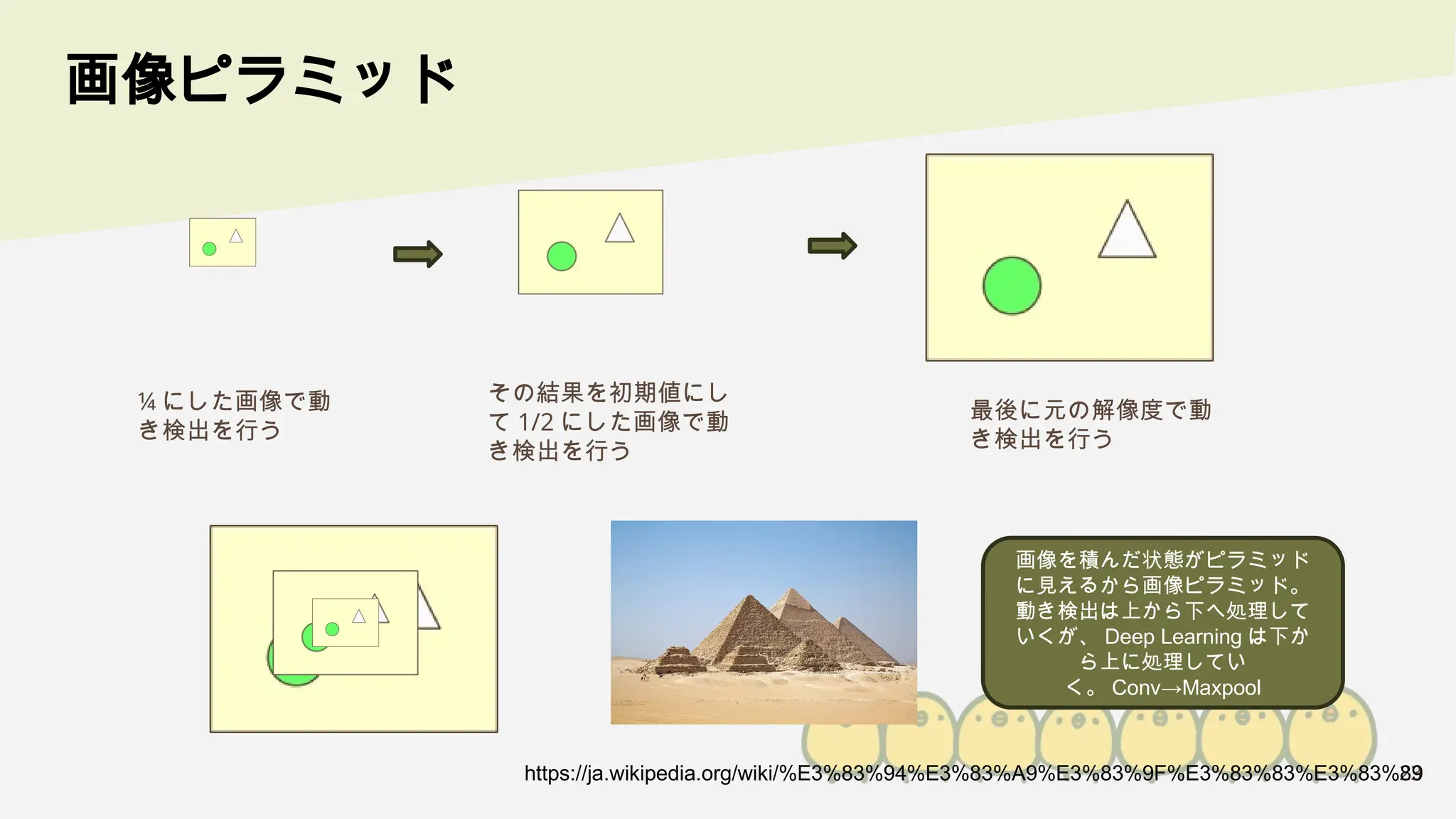
画像ピラミッド
¼ にした画像で動
き検出を行う
その結果を初期値にし
て 1/2にした画像で動
き検出を行う
最後に元の解像度で動
き検出を行う
https://ja.wikipedia.org/wiki/%E3%83%94%E3%83%A9%E3%83%9F%E3%83%83%E3%83%89
画像を積んだ状態がピラミッド
に見えるから画像ピラミッド。
動き検出は上から下へ処理して
いくが、 Deep Learning は下か
ら上に処理してい
く。 Conv→Maxpool
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
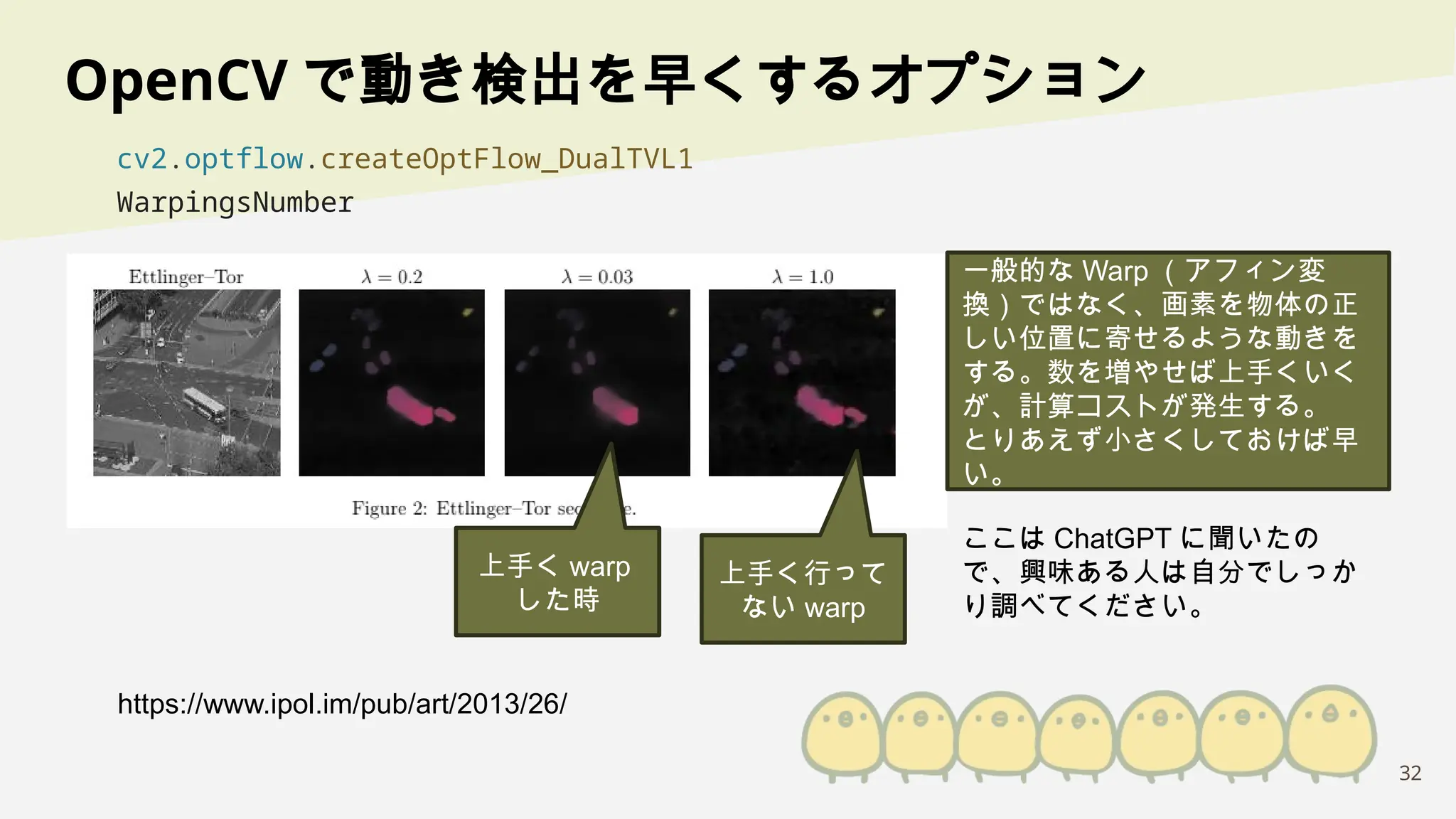
- 32.
- 33.