Downloaded 11 times

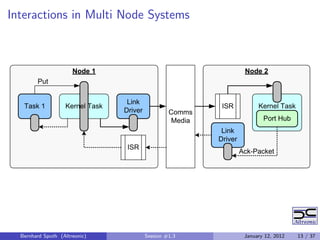
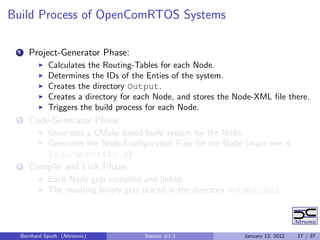
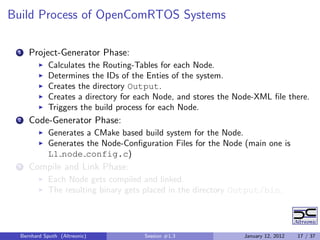
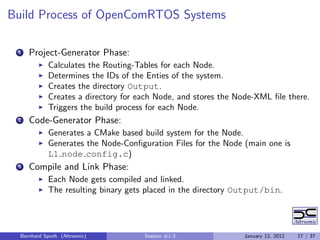
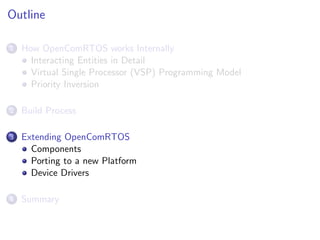





This document outlines the session "OpenComRTOS Internals". It discusses how OpenComRTOS works internally, including interacting entities like tasks and hubs, the virtual single processor programming model, and priority inversion. It also describes the build process for OpenComRTOS systems and how to extend OpenComRTOS, including components, porting to a new platform, and device drivers. The speaker is Bernhard Sputh from Altreonic providing details on these OpenComRTOS internals.







![[Mentor Graphics] A Perforce-based Automatic Document Generation System](https://cdn.slidesharecdn.com/ss_thumbnails/perforce-based-automatic-documentation-generation-paper-130523183020-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)