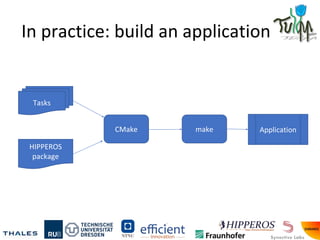
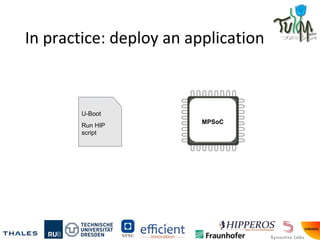
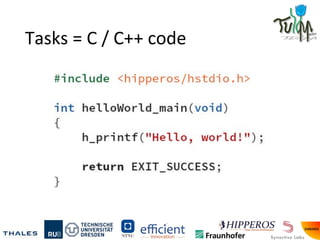
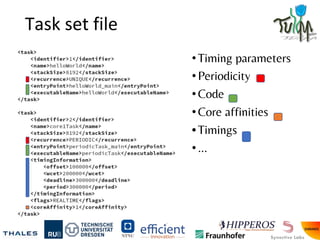
This document summarizes a workshop on the Tulipp project, which aims to develop ubiquitous low-power image processing platforms. The workshop covered shortcomings of existing platforms, introduced the Maestro real-time operating system as the reference platform, and described the concept of the Tulipp project to provide an operating system and tools to support heterogeneous architectures including FPGA and multi-core processors. Attendees participated in hands-on labs demonstrating how to build applications with Maestro, leverage OpenMP for parallelism, and use SDSoC tools to automatically accelerate functions in FPGA hardware.

































































![Devoxx 2014 [incomplete] summary](https://cdn.slidesharecdn.com/ss_thumbnails/devoxx-2014-summary-140614152155-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)























































![Lect 1 Number systems and base conversions. [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/lect1numbersystemsandbaseconversions-260111134109-67c2d865-thumbnail.jpg?width=640&height=640&fit=bounds)