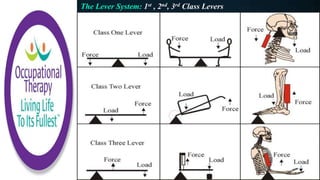
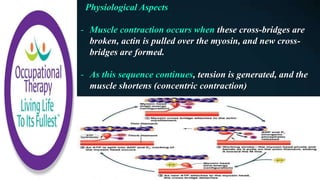
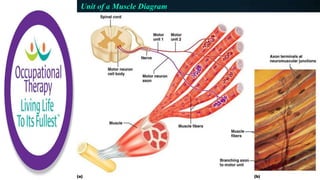
Occupational therapy focuses on improving range of motion, strength, and endurance through exercise. Biomechanics analyzes human motion through kinematics, which describes movement, and kinetics, which describes the forces behind movement. The musculoskeletal system uses levers and torque generated by muscles to enable motion. Muscles contain contractile filaments that slide past each other to generate force through motor unit recruitment and firing rates. Understanding biomechanics and physiology allows occupational therapists to design effective treatment programs.