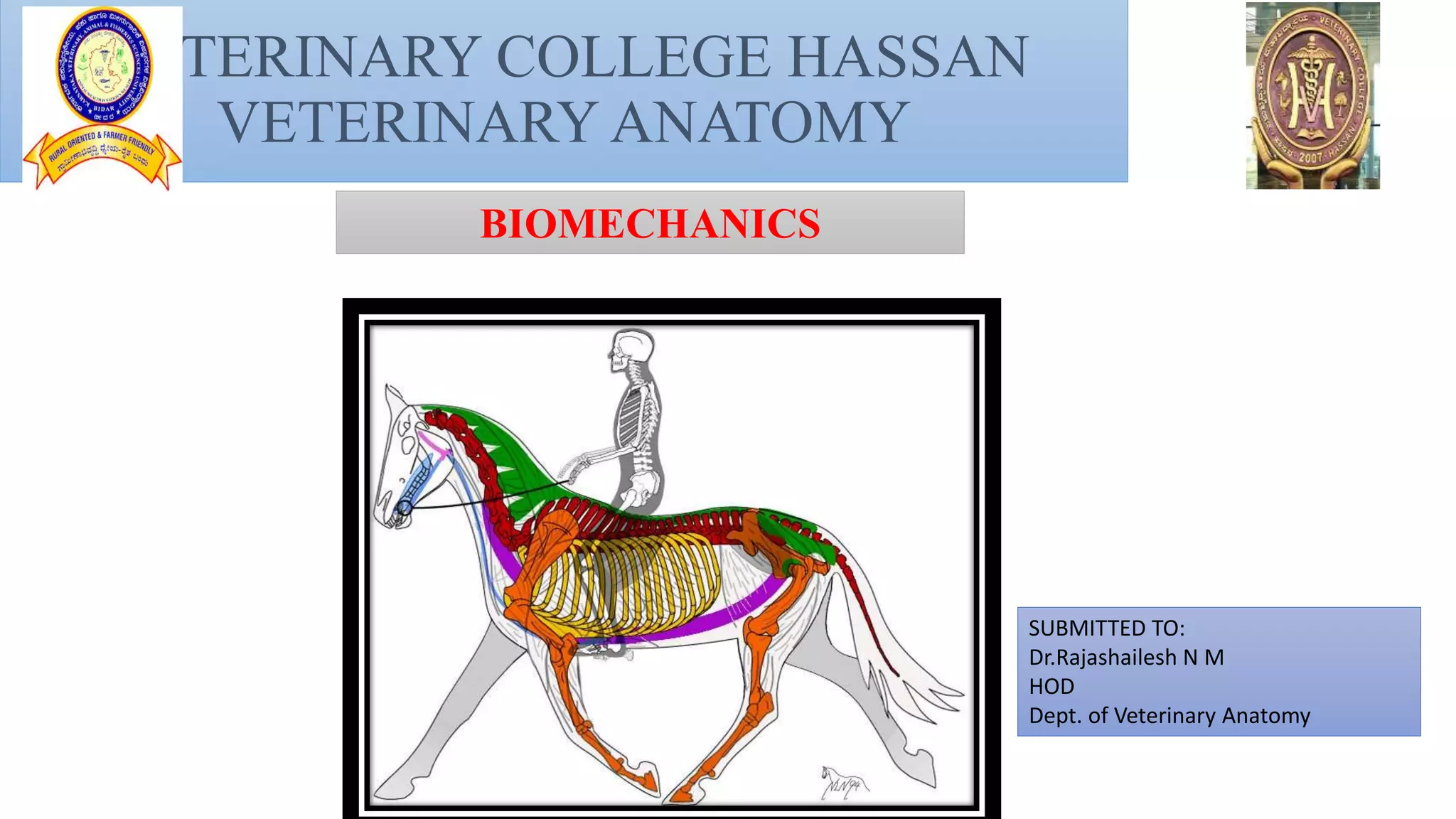
This document discusses biomechanics and its application to animal movement and physiology. It begins with definitions of biomechanics and its history. It then discusses topics such as statics versus dynamics, muscle fiber arrangements, centers of gravity, and the effects of muscle attachment positions on mechanical advantage and velocity. Joint positioning and its effects on function are also examined. Biomechanics is applied to fields like orthopedics, tribology, and lameness treatment.
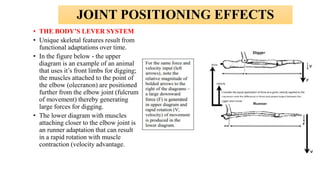
![BIOMECHANICS [Autosaved].pptx](https://image.slidesharecdn.com/biomechanicsautosaved-221219072740-b1b27218/85/BIOMECHANICS-Autosaved-pptx-27-320.jpg)










































































